Jina Lee1![]() , Yongrae Jo1
, Yongrae Jo1![]() , Donguk Kim2
, Donguk Kim2![]() , Byungwoon Park1†
, Byungwoon Park1†![]()
1Department of Aerospace Engineering and Department of Convergence Engineering for Intelligent Drone, Sejong University, Seoul 05006, Korea
2Agency for Defense Development, Daejeon 34060, Korea
†Corresponding Author: Byungwoon Park, E-mail: byungwoon@sejong.ac.kr
Citation: Lee, J., Jo, Y., Kim, D., & Park, B. 2025, Development and Analysis of CNAV User Range Accuracy Parameters for WAD-RNSS, Journal of Positioning, Navigation, and Timing, 14, 119-129.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2025 June, Volume 14, Issue 2, pages 119-129. https://doi.org/10.11003/JPNT.2025.14.2.119
Received on May 10, 2025, Revised on May 29, 2025, Accepted on May 31, 2025, Published on Jun 15, 2025.
Copyright © The Institute of Positioning, Navigation, and Timing
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
The Dual-Frequency Multi-Constellation (DFMC) Satellite-Based Augmentation System (SBAS) is a next-generation augmentation system that supports L1/L5 dual-frequency signals and multiple constellations, including GPS, GLONASS, Galileo, and BeiDou, whereas the legacy L1 SBAS operates on the L1 C/A single frequency and supports only GPS. DFMC SBAS employs ionosphere-free linear combination (IFLC) to eliminate first-order ionospheric delay errors and does not require an ionospheric correction message. Furthermore, Fast Correction (FC) messages have been removed from DFMC SBAS due to improved satellite clock stability and the discontinuation of Selective Availability (SA), which allows for more efficient use of bandwidth. With these structural improvements DFMC SBAS can support up to 92 satellites across multiple constellations, whereas the L1 legacy SBAS supported only up to 51 satellites. In this study, we provide a detailed comparison between L1 SBAS and DFMC SBAS, focusing on the differences in correction parameters and message structure. Key enhancements of DFMC SBAS include the integration of correction and integrity data into a single message (MT 32) and a flexible integrity broadcasting structure (MT 34–36). These refinements simplify the message structure, expand service coverage, and significantly improve integrity and positioning performance, particularly in regions with high ionospheric variability.
SBAS, DFMC SBAS, L1 SBAS
Global Navigation Satellite System (GNSS)은 위성에서 방송되는 항법 신호를 통해 사용자에게 정확한 위치와 시각 정보를 제공하는 시스템으로, 미국의 Global Positioning System (GPS)이 대표적이며 전세계적으로 널리 사용되고 있다. GPS의 주요 오차 요인은 위성 오차, 대기권 오차, 수신기 오차로 나눌 수 있는데, 위성 오차에는 위성 궤도 및 시계 오차, 대기권 오차에는 대류권 지연 오차 (Kim et al. 2017)와 전리층 지연 오차 (Yoon & Lee 2014, Park et al. 2022), 수신기 오차에는 다중경로 (Lee & Park 2022, Lee et al. 2023a,b)와 수신기 잡음 등이 포함된다. 이러한 오차 요인으로 인하여 GPS는 그 위치 정확도가 약 10 m 수준에 머무르고 있다.
이러한 GPS의 오차를 보정하고 신뢰할 수 있는 항법 정보를 제공하기 위해 위성기반 보강시스템(Satellite-Based Augmentation System, SBAS)이 도입되었다. SBAS는 보정정보와 무결성 정보를 포함한 메시지를 사용자에게 제공하여, 미터 수준의 위치 정확도를 제공한다. SBAS는 민간 항공 뿐만 아니라 해양, 철도, 차량 네비게이션, 스마트폰 등 다양한 분야에서 광범위하게 활용되고 있다 (Park & Seo 2021). 현재 여러 국가에서 자국의 SBAS 시스템을 독자적으로 구축하고 있으며, 대표적인 시스템으로는 미국의 Wide Area Augmentation System (WAAS), 유럽의 European Geostationary Navigation Overlay Service (EGNOS), 일본의 Multi-functional Satellite Augmentation System (MSAS), 인도의 GPS Aided GEO Augmented Navigation (GAGAN), 중국의 BeiDou Satellite Based Augmentation System (BDSBAS), 그리고 러시아의 System for Differential Corrections and Monitoring (SDCM) 등이 있다.
한국 역시 자국의 SBAS인 Korea Augmentation Satellite System (KASS)을 개발하여 시험 방송을 완료하고, 현재 공식 서비스를 제공하고 있다. 2014년부터 시스템 구축을 시작하여, 2022년 말에는 지상부분(ground segment)과 Geostationary Earth Orbit (GEO) 위성 MEASAT-3D의 통합을 완료하여, 한국은 세계에서 7번째로 SBAS 시스템을 보유한 국가가 되었으며, 현재 두 번째 GEO 위성과의 통합을 위해 추가 개발이 진행 중이다 (Houllier et al. 2024).
현행 SBAS가 보정을 하는 대상인 GPS는 그 운영 초기에는 L1 주파수 대역만 민간용으로 제공되었으나, 이후 L2, L5 등 다양한 주파수 대역의 항법 신호가 개발되어 사용되고 있다. 또한 GPS 외에도 러시아의 GLONASS, 유럽의 Galileo, 중국의 BeiDou 등 여러 국가에서 독자적인 GNSS를 구축하면서, 이중 주파수와 다중 위성군을 지원하는 Dual-Frequency Multi-Constellation (DFMC) SBAS의 필요성이 증가하였다. DFMC SBAS는 L1/L5 이중 주파수와 다중 위성군을 지원함으로써 기존보다 더욱 정확하고 안정적인 보정 서비스를 제공할 수 있다. 특히 DFMC를 지원하는 수신기들이 보편화 됨에 따라, DFMC SBAS 서비스에 대한 수요 증가가 더욱 가속화되고 있다. 최근까지 DFMC SBAS에 대한 연구가 활발히 진행되었으며, 2023년에는 국제민간항공기구(International Civil Aviation Organization, ICAO)가 DFMC SBAS에 대한 Standards and Recommended Practices (SARPs) 개정안을 승인함으로써 시스템 수준의 국제 표준화가 완료되었다 (ICAO 2023).
전 세계적으로 DFMC SBAS에 대한 이목이 집중되고 있는 가운데, 기존의 L1 SBAS 대비 DFMC SBAS의 주요 특징과 차이점을 분석할 필요가 있다. 본 논문에서는 기존 L1 SBAS와 DFMC SBAS 간의 보정 파라미터 및 메시지 구조의 변경점을 중심으로 비교 분석하고자 한다.
2장에서는 기존 L1 SBAS에서 제공하는 보정정보와 무결성 정보를 바탕으로, 각 보정 항목 및 해당 오차의 분산 산출 방식을 설명한다. 이어서 3장에서는 L1 SBAS 대비 DFMC SBAS에서 변경된 메시지 구조를 중심으로, 보정 항목과 잔여 오차 분산 산출 방식의 차이를 분석하였으며, 마지막으로, 4장에서 결론을 제시하였다.
SBAS의 작동 원리는 Fig. 1과 같다. GPS 위성은 사용자에게 항법(navigation) 메시지를 송신하며, 지상에 설치된 광역기준국은 이 신호를 수신하여 의사거리 측정치, 수직 전리층 지연량 등의 관련 데이터를 생성한다. 생성된 데이터는 중앙처리국으로 전송되어 보정 정보와 무결성 정보가 산출된다. 해당 정보는 위성통신국을 통해 정지궤도(GEO) 위성으로 업링크되며, GEO 위성은 서비스 제공 영역 내 사용자에게 보정 정보 및 무결성 정보가 포함된 메시지를 방송한다 (Kim 2007). 이를 통해 사용자는 GPS에서 제공된 항법 메시지를 기반으로 GPS 위성의 위치를 추정하고, 여기에 SBAS에서 제공하는 보정정보를 적용함으로써 보다 정확한 위성의 위치를 계산할 수 있다 (Yoon et al. 2020). 현재 운용 중인 모든 SBAS는 Radio Technical Commission for Aeronautics (RTCA)가 제정한 최소 운용 성능 기준(Minimum Operational Performance Standards, MOPS)을 기반으로 수신기에 서비스를 제공하며, L1 SBAS에 대한 MOPS는 RTCA의 DO-229D 및 DO-229E 문서에 정의되어 있다 (RTCA 2006, 2016).
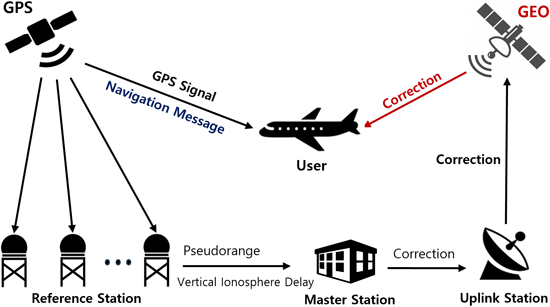
Fig. 1. SBAS architecture.
L1 SBAS는 GPS와 동일한 단일 주파수인 L1 C/A 신호를 기반으로 위성 궤도 및 시계 오차, 전리층 지연오차에 대한 보정정보를 제공하여, 약 1-3 m 수준의 신뢰할 수 있는 위치 정확도를 지원한다. 보정정보는 이진수 형식의 고정된 메시지 포맷으로 제공되며, 각 메시지 타입(Message Type, MT)은 250 bits로 구성되어 250 bps의 속도로 전송된다. Fig. 2는 메시지 구조를 나타내고 있으며, 메시지 구조는 8 bits의 preamble, 6 bits의 메시지 유형 식별자 (Message type Identifier), 212 bits의 data field, 그리고 24 bits의 Cyclic Redundancy Check (CRC) parity로 이루어져 있다.

Fig. 2. L1 SBAS message format (EUROCAE 2023).
Table 1은 L1 SBAS 메시지 유형별 기능을 나타내며, 주요 내용은 다음과 같다. MT 1은 활성화된 위성을 식별하는 PRN mask를 제공하고, MT 2~5는 빠르게 변하는 위성 시계 오차에 대한 Fast Correction (FC)을, MT 25는 천천히 변하는 위성 궤도 및 시계 오차에 대한 Long-term Correction (LC)을 전송한다. 위성에 대한 무결성 정보는 MT 6, 7, 10, 28을 통해 제공된다. 전리층에 대한 보정정보(Ionospheric Correction, IC)는 MT 18과 MT 26을 통해 제공되며, 전리층의 무결성 정보 또한 MT 26을 통해 제공된다. 대류권 지연 보정(Tropospheric Correction, TC)은 별도의 메시지로 제공되지 않으며, 사용자가 SBAS MOPS 모델을 활용해 계산해야 한다.
Table 1. L1 SBAS message contents.
| L1 message type | Contents |
|---|---|
| 1 | PRN mask assignments |
| 2–5 | Fast corrections |
| 6 | Integrity information |
| 7 | Fast correction degradation factor |
| 10 | Degradation parameters |
| 18 | Ionospheric grid point masks |
| 25 | Long-term satellite error corrections |
| 26 | Ionospheric delay corrections |
| 28 | Clock-ephemeris covariance matrix |
| 63 | SBAS L1 null message |
이러한 메시지들은 Fig. 3과 같이 서로 유기적으로 연결되어 있으며, 사용자는 각 메시지에 포함된 mask 정보와 데이터의 유효성 식별자인 Issue of Data (IOD)를 통해 메시지 간 관계를 파악할 수 있다. MT 1에 포함된 Issue of Data PRN Mask (IODP)는 활성화된 PRN을 식별하며, 해당 위성에 적용 가능한 메시지들 MT 2~5, 7, 25, 28 등을 연결한다. 또한, FC에서 제공하는 Issue of Data Fast Correction (IODF)는 MT 6에서 제공되는 무결성 정보(UDREI)와 연계되고, 전리층 보정의 경우 Issue of Data Ionospheric (IODI)는 MT 18의 Ionospheric Grid Point (IGP) mask와 MT 26의 무결성 정보(GIVEI)메시지를 연계하며, 이에 관해서는 뒤에 자세히 설명하기로 한다. 각 메시지를 통해 제공되는 보정 항목들은 실제 위치 보정에 활용되며, SBAS 사용자는 이를 조합하여 Eq. (1)과 같이 Range Correction (RC)을 산출할 수 있다.
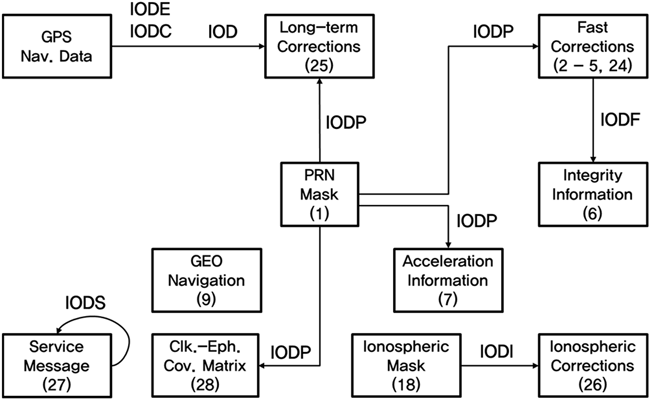
Fig. 3. Relationship between L1 SBAS message (EUROCAE 2023).
$$RC(t) = FC(t) + LC(t) + IC(t) + TC(t)$$
정확한 항법 해 및 보호수준(protection level)을 산출하기 위해서는 RC뿐만 아니라, 각 보정 항목에 대한 잔여 오차의 분산도 필요하다. SBAS는 이러한 잔여 오차의 신뢰 한계(confidence bound)를 산출하기 위해 무결성 파라미터를 함께 제공한다. 잔여 오차의 신뢰 한계는 L1 GPS 의사거리(pseudorange)에 SBAS 보정(RC)을 적용한 후에도 남아 있을 것으로 예상되는 오차의 분산을 의미하며 Eq. (2)와 같이 모델링된다.
$$\sigma^2 = \sigma^2_{flt} + \sigma^2_{UIRE} + \sigma^2_{air} + \sigma^2_{tropo}$$
여기서, $\sigma^2_{flt}$는 FC 및 LC 보정에 대한 잔차 오차 분산, $\sigma^2_{UIRE}$와 $\sigma^2_{tropo}$는 각각 전리층 및 대류권 보정 잔차 오차에 대한 분산, $\sigma^2_{air}$는 수신기 잡음 및 다중경로 오차 분산을 의미한다.
과거 1990년대 미국 정부는 적국의 악의적인 이용을 방지하기 위해 GPS 신호에 고의 잡음(Selective Availability, SA)을 삽입하여 위성 시계 정확도를 의도적으로 저하시켰다. 이로 인해 GPS 신호 오차는 Fig. 4의 빨간 그래프와 같이 빠르게 변동하며 최대 수 백미터까지 증가했다 (Kee et al. 2008). SA는 2000년에 공식적으로 해제되었지만, SBAS는 계속해서 FC를 제공하고 있으며, 이는 의사거리 보정정보(Pseudorange Correction, PRC)의 형태로 MT 2-5를 통해 6초 간격으로 방송되고 있다.
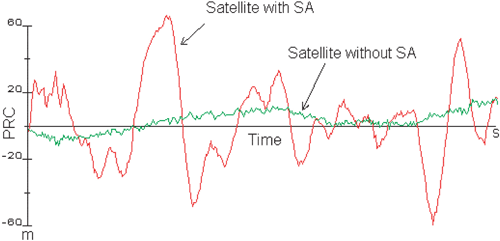
Fig. 4. PRC fluctuation SA off on (Kee et al. 2008).
사용자가 PRC를 수신한 시점과 실제로 보정정보를 적용하는 시점 사이에는 시간 차이가 존재할 수 있으며, 이로 인해 발생하는 보정값의 시간 지연 오차를 보상하기 위해 PRC의 변화율인 Range Rate Correction (RRC)을 계산할 수 있다. RRC는 최근 수신된 $PRC_{current}$와 그 이전에 수신된 $PRC_{previous}$의 차이를 시간 간격($\Delta t$)으로 나누어 계산되며, 계산된 RRC를 최근 수신된 PRC에 적용하여 사용자 직접 보정정보를 산출할 수 있다. FC와 RRC의 계산하는 식은 Eqs. (3, 4)와 같으며, 여기서 $t_{of}$는 최근 수신된 시간을 의미한다 (RTCA 2006).
$$FC(t) = PRC(t_{of}) + RRC(t_{of}) \cdot (t – t_{of})$$
$$RRC(t_{of}) = \frac{PRC_{current} – PRC_{previous}}{\Delta t}$$
MT 2-5는 FC 보정정보와 함께, 해당 보정의 무결성 정보인 User Differential Range Error Indicator (UDREI)를 제공하며, 메세지당 최대 13개 위성에 대한 정보를 포함할 수 있다. UDREI는 FC와 LC를 결합한 보정의 정확도를 나타내는 지표이며, 이를 기반으로 $\sigma^2_{UDRE}$값이 산출된다. 또한, MT 6은 최대 51개의 위성에 대한 UDREI를 포함하여 전송할 수 있으며, 위성에 이상이 발생한 경우, MT 2-5의 수신을 기다리지 않고 즉시 방송되어 사용자에게 빠르게 경고할 수 있도록 한다 (RTCA 2006).
$\sigma^2_{flt}$는 FC와 LC를 적용한 이후의 의사거리 잔차 오차 분산을 의미하며, $\sigma_{UDRE}$와 열화 파라미터를 고려하여 $RSS_{UDRE}$이 0인 경우와 1인 경우에 따라 Eq. (5)와 같이 계산된다.
$$\sigma^2_{flt} =
\begin{cases}
\left( (\sigma_{UDRE}) \cdot (\delta UDRE) + \varepsilon_{fc} + \varepsilon_{rrc} + \varepsilon_{ltc} + \varepsilon_{er} \right)^2, & \text{if } RSS_{UDRE} = 0 \\
\left((\sigma_{UDRE}) \cdot (\delta UDRE)\right)^2 + \varepsilon^2_{fc} + \varepsilon^2_{rrc} + \varepsilon^2_{ltc} + \varepsilon^2_{er}, & \text{if } RSS_{UDRE} = 1
\end{cases}$$
여기서 $\delta UDRE$는 UDREI의 변화를 나타내며, 사용자의 위치와 MT 27과 28에서 제공하는 파라미터를 이용해 계산된다. $\varepsilon_{fc}$, $\varepsilon_{rrc}$, $\varepsilon_{ltc}$, $\varepsilon_{er}$는 각각 FC, RRC, LC, 그리고 En-route부터 비정밀 접근(Non-Precision Approach, NPA)까지의 운용 조건에 해당하는 열화 계수이며, MT 7 및 MT 10에서 제공된다.
장기적으로 변동하는 위성 궤도 및 시계 오차에 대한 보정정보는 MT 25에 포함되며, LC를 적용하기 위해서는 GPS Ephemeris의 Issue of Data Ephmeris (IODE)와 MT 25의 IOD가 일치하는지 확인해야 한다. 두 값이 일치할 경우에만, MT 25의 위성 궤도 및 시계 오차 보정정보를 해당 GPS Ephemeris를 이용하여 계산한 위성궤도 및 시계 오차에 적용할 수 있다 (RTCA 2006).
비록 과거의 고의 잡음 수준만큼은 아니지만, 위성 궤도 및 시계 오차도 시간에 따라 변화가 발생하기 때문에, 최대 120초 간격으로 전송되는 MT 25에서도 이에 대한 대비를 하고 있다. 이 과정에서 velocity code가 사용된다. velocity code가 0인 경우, 하나의 메시지에 최대 네 개 위성에 대한 궤도 및 시계 오차 보정정보를 제공하되, 메시지의 크기가 작아 LC를 더욱 자주 전송할 수 있다. 반면, velocity code가 1인 경우에는 위성 관련 보정정보와 함께 보정정보의 변화율도 추가로 제공된다. 이 경우 MT 25를 점유하는 데이터 량이 많아짐에 따라 한 메시지에 최대 두 개의 위성 정보만을 전송하게 되며, 메시지가 전달되지 않는 시간 동안 선형적으로 보상할 수 있으므로, 전송주기를 좀 더 길게 설정할 수 있다. LC의 velocity code가 1인 경우, 위성 궤도 오차 보정정보($\left[ \delta x_k \quad \delta y_k \quad \delta z_k \right]^T$)와 위성 시계 오차 보정정보($LC$) 는 Eqs. (6, 7)을 이용하여 계산된다 (RTCA 2006).
$$\begin{bmatrix}
\delta x_k \\
\delta y_k \\
\delta z_k
\end{bmatrix}
=
\begin{bmatrix}
\delta x \\
\delta y \\
\delta z
\end{bmatrix}
+
\begin{bmatrix}
\delta \dot{x} \\
\delta \dot{y} \\
\delta \dot{z}
\end{bmatrix}
\cdot (t – t_{LT})$$
$$LC(t) = \delta a_{f0} + \delta a_{f1} \cdot (t – t_{LT})$$
여기서 $t$는 보정 정보를 적용한 시간이고, $t_{LT}$는 해당 보정 메시지가 적용되는 하루 중 기준 시각(time of day applicability)을 의미한다. 한편, velocity code가 0인 경우에는 보정정보의 변화율 항인 $\left[ \dot{\delta x} \quad \dot{\delta y} \quad \dot{\delta z} \right]^T$ 및 $\delta a_{f1} $는 각각 0으로 간주된다.
LC에 대한 무결성 정보는 FC와 마찬가지로 MT 2-6과 MT 10을 통해 정확도와 열화계수가 제공되며, MT 28에서는 위성 시계 및 궤도 오차 보정 정보의 신뢰도를 평가하기 위한 공분산 행렬(covariance)이 제공된다. 이 정보를 기반으로 LC에 대한 오차 분산은 FC와 통합되어 Eq. (5)의 계산에 반영된다 (RTCA 2006).
L1 SBAS는 전리층 지연 오차를 보정하기 위해 Ionospheric Grid Point (IGP) 기반의 모델을 사용하며, IGP는 전 지구를 0부터 10까지 총 11개의 band로 구분한다. Fig. 5에 나타난 것처럼, bands 0-8은 수직 방향의 띠를 형성하며, Fig. 5에 나타나지 않았지만 bands 9-10은 위도 60도 이상 지역에 수평 띠 형태로 배치된다. 각 band의 IGP는 위도에 따라 서로 다른 간격으로 배열되어 있으며, bands 0-7은 각 band마다 201개의 격자점으로, band 8은 200개, bands 9-10은 각 band마다 192개의 격자점으로 구성되어 총 2,192개의 격자점으로 구성되어 있다. L1 SBAS는 MT 18을 통해 유효한 IGP mask를 제공하며, MT 26을 통해 해당 IGP에 대한 수직 지연 값과 함께 무결성 지표인 Grid Ionospheric Vertical Error Indicator (GIVEI)를 제공한다. GIVEI를 통해 전리층 수직 지연 값의 정확도($\sigma^2_{GIVE}$)를 알 수 있으며, 이를 통해 수직 오차 분산($\sigma^2_{UIVE}$)이 산출된다 (RTCA 2006).
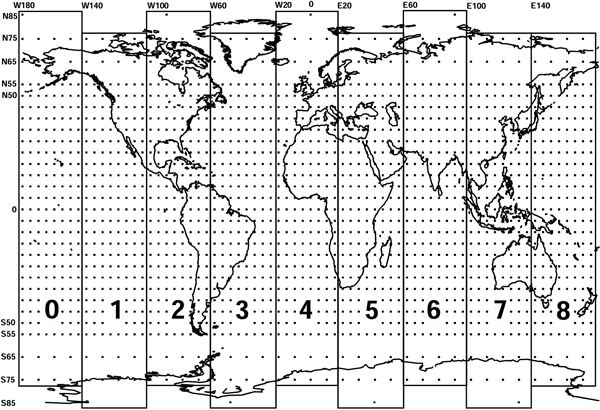
Fig. 5. Predefined global IGP grid (EUROCAE 2023).
사용자는 수신한 위성 신호에 대해 Ionospheric Pierce Point (IPP) 위도($\phi_{pp}$)와 경도($\lambda_{pp}$)를 계산한 후, 해당 IPP 주변에 위치한 인접한 3개 또는 4개의 IGP의 수직 지연 값을 이용하여 IPP 위치의 수직 지연 값($\tau_{vpp}$)을 보간하여 산출한다. 이후 최종적으로 전리층 지연 보정값(IC)은 보간된 수직 지연 값($\tau_{vpp}$)에 경사계수($F_{pp}$)를 곱하여 Eps. (8, 9)에 따라 계산된다 (RTCA 2006).
$$F_{pp} = \left[1 – \left( \frac{R_e \cos E}{R_e + h_I} \right)^2 \right]^{-\frac{1}{2}}$$
$$IC = -F_{pp} \cdot \tau_{vpp}$$
여기서, $R_e$는 지구 타원체 반지름, $h_I$는 최대 전자 밀도층의 고도(350 km), E는 사용자 기준 위성의 고도각을 의미한다. 또한, 전리층 지연 보정의 오차 분산인 $\sigma^2_{UIRE}$는 $\sigma^2_{UIVE}$에 경사계수($F_{pp}$)를 적용하여 Eq. (10)과 같이 계산된다.
$$\sigma^2_{UIRE} = F^2_{pp} \cdot \sigma^2_{UIVE}$$
SBAS는 대류권 지연 오차에 대한 보정정보를 별도로 제공하지 않기 때문에, 사용자가 MOPS 모델에 기반하여 직접 보정 값을 계산해야 한다. 대류권 지연은 지역적 특성이 강하므로, 수신기의 위치와 위성의 고도각에 따라 대류권 지연 오차를 산출할 필요가 있다. 이를 위해 관측 지역의 평균 기상변수($\xi_0$)와 기상 변수의 계절 변화량($\Delta \xi$)을 고려한 압력(P), 온도(T), 수증기압(e) 등이 사용된다.
최종적으로 대류권 지연 보정값(TC)은 수신기 고도와 기상 조건을 반영하여 계산된 건조 지연($d_{hyd}$)과 습윤 지연($d_{wet}$)을 합산하고, 위성 고도각($El$)에 따른 경사 함수(mapping function, m)를 적용하여 Eqs. (11, 12)와 같이 계산할 수 있다 (RTCA 2006).
$$TC = -(d_{hyd} + d_{wet}) \cdot m(El)$$
$$m(El) = \frac{1.001}{\sqrt{0.002001 + \sin^2(El)}}$$
또한, 대류권 지연 보정의 오차 분산인 $\sigma^2_{tropo}$는 위 경사 함수를 활용하여 Eq. (13)과 같이 산출할 수 있다.
$$\sigma^2_{tropo} = \left(0.12 \cdot m(El)\right)^2$$
L1 SBAS는 MOPS에서도 기술되어 있듯이 GPS와 GLONASS를 모두 지원하도록 설계되었으나, GLONASS에 대한 세부 기준이 충분히 마련되지 않아 러시아의 SDCM을 제외한 대부분의 L1 SBAS 시스템은 GPS 위성에 대해서만 보강 서비스를 제공하고 있다.
또한, 메시지 구조 측면에서도 제한이 존재한다. L1 SBAS 메시지는 250 bps의 고정된 대역폭 내에서 운용되며, ICAO가 정의한 무결성 요구사항인 Time-To-Alert (TTA) 조건을 충족하기 위해 MT 2-6에 포함된 UDREI는 최대 6초 간격으로 방송되어야 한다. 이로 인해 Fig. 6에서 확인할 수 있듯이 WAAS의 경우 MT 2-4가 전체 대역폭(bandwidth)의 50% 이상을 차지하고 있으며, 결과적으로 추가적인 위성군에 대한 보강 메시지를 송출할 여유가 부족하다 (Lim 2017, Lim et al. 2023). 따라서 L1 SBAS는 최대 51개 위성 까지만 지원 가능하며, GPS 이외의 다중 위성군 확장이 어려운 구조적 한계를 가진다.
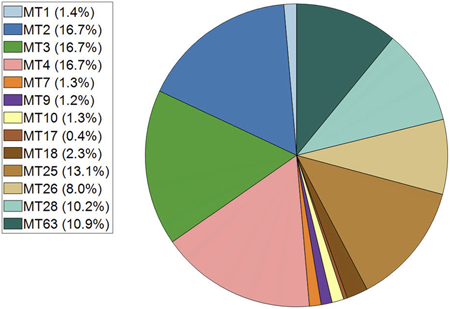
Fig. 6. WAAS L1 SBAS bandwidth occupation per MT (Lim et al. 2023).
메시지 구성 또한 보정정보가 위성과 전리층에 대해 각각 분리되어 제공되므로, 구조적으로 복잡한 형태를 가진다. 위성 보정 정보는 FC와 LC로 나뉘어 각각 독립된 메시지로 제공되며, 전리층 보정 정보 역시 별도의 메시지로 제공된다. 무결성 정보 또한 보정정보와 통합되지 않고, UDREI와 GIVEI 형태로 각각 다른 메시지를 통해 전달된다.
전리층 보정 방식에서도 근본적인 제약이 존재한다. L1 SBAS는 단일 주파수를 기반으로 운용되기 때문에, 사용자 위치에서의 전리층 지연 오차를 보정하기 위해 IGP 기반의 보간 방식을 사용한다. 그러나 이 방식은 태양활동과 계절적 요인 등에 따라 전리층 지연 값이 크게 변동할 수 있으며, 특히 전리층 폭풍이 발생할 경우, 오차가 급격히 증가하여 정밀한 위치 측정의 적용 범위가 제한된다 (ICAO 2017).
기존 L1 SBAS 메시지의 구조적 한계를 극복하고, 예기치 못한 전리층 오차를 방지하기 위해서 L1 C/A 및 L5 이중 주파수와 다중 위성군을 지원하는 Dual-Frequency Multi-Constellation (DFMC) SBAS의 필요성이 제기되었다. DFMC SBAS는 L1 SBAS와는 별도로 제공되는 서비스로 정의되며 (ICAO 2017), 최근 이중 주파수와 다중 위성군을 수신할 수 있는 GNSS 수신기의 보급이 확산되면서 SBAS의 적용 범위의 확장이 더욱 강조되고 있다. 이에 따라 DFMC SBAS의 연구가 활발히 진행되었으며, 2023년에는 ICAO에 의해 시스템 수준의 국제 표준화(SARPs)가 완료되었다 (ICAO 2023). DFMC SBAS는 ICAO의 Annex 10, Volume I에 정의된 SARPs를 따르며, 항공기 수신기 장비는 RTCA와 EUROCAE에서 발행한 “RTCA DO-401” 및 “EUROCAE ED-259A”에 명시된 MOPS를 준수한다 (Dennis 2024). DFMC 서비스 관련 보고서에 따르면, 현재 SBAS 서비스 제공자들은 L1 SBAS 사용자의 하위 호환성(Backward Compatibility)과 L5 신호의 손실 및 간섭 발생시 기존 L1 SBAS로 전환하는 대체모드(fall-back mode)를 지원하기 위해, DFMC SBAS가 도입된 이후에도 L1 SBAS 서비스를 병행하여 제공할 예정이다 (ICAO 2018).
이중 주파수를 활용한 수신기는 Ionosphere-free (IF) 선형 조합을 통해 의사거리 측정치에서 전리층 지연 오차를 효과적으로 제거할 수 있으므로 DFMC SBAS는 전리층 보정정보를 제공하지 않으며, 위성의 궤도 및 시계 오차의 보정정보만을 제공한다. 따라서 DFMC SBAS의 RC는 위성에 대한 보정정보와 대류권 보정정보로 구성되며, 대류권 보정정보는 L1 SBAS와 동일한 MOPS 모델을 사용하여 사용자가 계산한다. DFMC SBAS 메시지는 Fig. 7과 같이 preamble을 기존 8 bits에서 4 bits로 축소하고, data field를 216 bits로 확장함으로써 더 많은 데이터를 포함할 수 있도록 개선되었다 (EUROCAE 2023).

Fig. 7. DFMC SBAS message format (EUROCAE 2023).
DFMC SBAS의 메시지 구조와 메시지 간의 관계는 각각 Table 2와 Fig. 8에 제시되어 있다. MT 31에서 위성의 mask를 제공하고, MT 32 하나의 메시지에서 위성 궤도 및 시계 오차 보정정보, 무결성 정보(DFREI)와 공분산 행렬 값을 제공한다. MT 34-36에서는 활성화된 전체 위성의 무결성 정보(DFREI, DFRECI)를 제공하며, MT 37에서는 잔여 오차 분산을 계산하는 열화 파라미터(OBAD)와 DFREI의 scale 테이블을 제공한다 (EUROCAE 2023).
Table 2. DFMC SBAS message contents.
| L5 message type | Contents |
|---|---|
| 31 | SBAS satellite mask assignments |
| 32 | Satellite clock-ephemeris error corrections and covariance matrix |
| 34,35,36 | Integrity information (DFREI and DFRECI) |
| 37 | OBAD parameters and DFREI scale table |
| 63 | SBAS L5 null message |
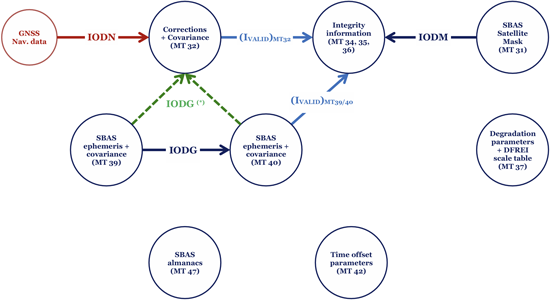
Fig. 8. Relationship between DFMC SBAS message (EUROCAE 2023).
2000년 5월, 미국 정부의 고의잡음(SA)이 공식적으로 해제되면서, GPS의 오차는 Fig. 4의 빨간 그래프와 같이 빠르고 급격하게 변동하던 수준에서 초록색 그래프와 같은 안정적인 수준으로 개선되었다 (Kee et al. 2008). 또한 위성 시계 기술의 발달로, 기존에 비선형적으로 변화하던 위성 시계 오차가 Fig. 9와 같이 선형적으로 변동을 보이게 되었으며 (Walte et al. 2013), Fig. 10에서는 FC에 유무와 관계없이 위치 오차가 비슷한 수준으로 유지되는 것을 확인할 수 있다 (Lim et al. 2017).
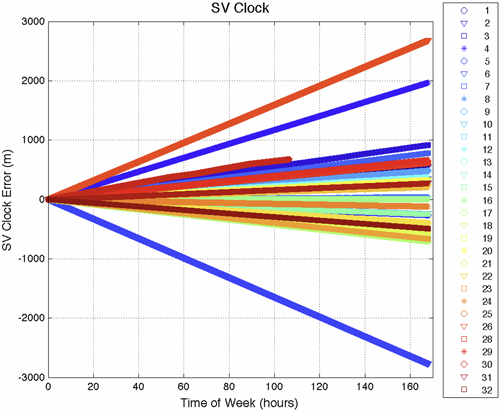
Fig. 9. Improved stability of the GPS clock (Walter 2013).
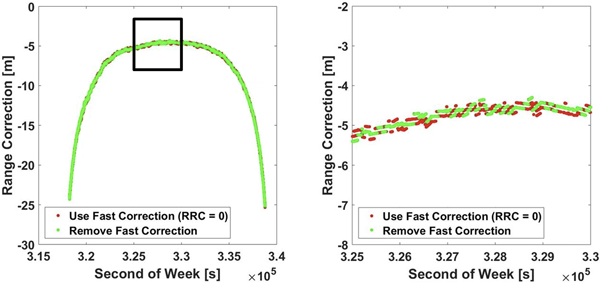
Fig. 10. Range corrections by FC (green: w/o FC, red: w/ FC) (Lim et al. 2017).
이에 따라 Lim et al. (2023)은 기존 SBAS에서 제공되던 FC의 PRC를 MT 25의 LC의 위성 시계 보정 값에 통합함으로써, 사용자 위치 정확도를 유지하면서 메시지 전송에 필요한 대역폭을 효율적으로 줄일 수 있음을 보였다. 이러한 방식은 6초마다 방송되던 FC의 빈번한 갱신 필요성을 줄이고, 절감된 대역폭을 활용하여 기존 GPS 단일 시스템 기반의 L1 SBAS를 다중 GNSS를 지원하는 Single-Frequency Multi-Constellation (SFMC) SBAS로 확장하는 방안을 제시하였다.
한편, DFMC SBAS 역시 FC를 송신하지 않고 위성 시계 및 궤도 오차 중심의 보정 정보를 제공하는 구조를 채택하고 있어, 메시지 구성 측면에서 유사한 흐름을 따르고 있다. 기존 L1 SBAS는 대역폭의 제약으로 인해 최대 51개의 GPS 및 GLONASS 위성만을 지원했으나, DFMC SBAS는 FC 생략 등을 통해 확보된 대역폭을 활용하여 92개의 다중 GNSS 위성군을 지원하도록 설계되었다.
이와 관련하여, DFMC SBAS의 MT 31은 무결성 정보 메시지(MT 34,35,36)에서 사용되는 위성의 mask 정보를 제공한다. MOPS에 정의된 위성군은 GPS, GLONASS, Galileo, BeiDou로 구성되며, 각 위성군별로 최대 37개의 slot이 할당되고, GEO SBAS 위성에는 최대 39개의 slot이 배정되어 있다. 또한, 향후 도입될 위성군을 위한 Reserved 영역도 포함되어 있다.
각 slot에는 해당 위성이 보정 대상일 경우 “1” 값이 할당되며, 보정 대상이 아닐 경우 “0”으로 설정된다. 전체 slot은 총 214개까지 정의되어 있지만, 최대 92개 위성에 대해 서비스를 제공한다. Slot 값이 1인 위성에 대해서 순차적으로 1부터 92까지의 index로 매핑(mapping)되며, 이 index를 기준으로 보정정보 및 무결성 정보가 제공된다. 위성 mask 정보는 Issue of Data Mask (IODM) 값으로 관리되며, 위성 mask 정보가 업데이트될 때마다 IODM 값은 1씩 증가한다 (EUROCAE 2023).
DFMC SBAS는 Table 3의 MT 32를 통해 하나의 위성에 대한 궤도 및 시계 오차 보정정보와 무결성 정보를 동시에 제공한다. 제공되는 무결성 정보로는 정확도 수준을 나타내는 오차 분산 정보 Dual Frequency Range Error Indicator (DFREI)와 공분산(covariance) 행렬 값이 포함되며, Issue of Data Navigation (IODN) 값은 해당 위성의 방송궤도력 IOD와 연계된다.
Table 3. DFMC SBAS MT 32.
| Section | Name | Location | Scale factor | Unit | Description | |
|---|---|---|---|---|---|---|
| start | end | |||||
| Message header | Satellite slot number | 10 | 18 | 1 | – | Satellite slot number |
| IODN | 19 | 28 | 1 | – | Issue of data navigation | |
| Orbit param | δx (ECEF) | 29 | 39 | 0.0625 | m | Delta WGS-84 ECEF position, x-axis |
| δy (ECEF) | 40 | 50 | 0.0625 | m | Delta WGS-84 ECEF position, y-axis | |
| δz (ECEF) | 51 | 61 | 0.0625 | m | Delta WGS-84 ECEF position, z-axis | |
| δB | 62 | 73 | 0.03125 | m | Clock offset correction | |
| δx rate-of-change (ECEF) | 74 | 81 | m/s | Delta WGS-84 ECEF position drift, x-axis | ||
| δy rate-of-change (ECEF) | 82 | 89 | m/s | Delta WGS-84 ECEF position drift, y-axis | ||
| δz rate-of-change (ECEF) | 90 | 97 | m/s | Delta WGS-84 ECEF position drift, z-axis | ||
| δB rate-of-change (ECEF) | 98 | 106 | m/s | Clock drift correction | ||
| Corrections time of day applicability, tD | 107 | 119 | 16 | s | Corrections time of day applicability | |
| Covariance param | Scale exponent | 120 | 122 | 1 | – | Scale factor of covariance matrix |
| E1,1 | 123 | 131 | 1 | – | ||
| E2,2 | 132 | 140 | 1 | – | ||
| E3,3 | 141 | 149 | 1 | – | ||
| E4,4 | 150 | 158 | 1 | – | ||
| E1,2 | 159 | 168 | 1 | – | coded as two’s complement | |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | |
| E3,4 | 209 | 218 | 1 | – | coded as two’s complement | |
| Integrity param | DFREI | 219 | 222 | 1 | – | Dual frequency error indicator |
| δRCORR | RCORR scale factor | 223 | 225 | 1/8 | – | RCORR scale factor |
MT 32는 위성 궤도 및 시계 오차 보정정보와 그 변화율을 함께 제공하며, L1 SBAS의 LC와 유사하게 보정정보를 Eqs. (14, 15)와 같이 계산할 수 있다. 여기서 $\Delta t_D = t – t_D$이며, $t$는 사용자가 보정 정보를 적용한 시간이고, $t_D$는 해당 보정 메시지가 적용되는 하루 중 기준 시각(time of day applicability)으로 단위는 모두 초(s)이다. 또한, c는 진공에서의 빛의 속도로 299,792,458 m/s이다 (EUROCAE 2019, 2023).
$$\begin{bmatrix}
\delta x_k \\
\delta y_k \\
\delta z_k
\end{bmatrix}
=
\begin{bmatrix}
\delta x \\
\delta y \\
\delta z
\end{bmatrix}
+
\begin{bmatrix}
\delta \dot{x} \\
\delta \dot{y} \\
\delta \dot{z}
\end{bmatrix}
\cdot \Delta t_D$$
$$\delta \Delta t_{sv}(t) = \frac{\delta B + \delta \dot{B} \cdot \Delta t_D}{c}$$
L1 SBAS는 Table 4의 MT 25에서 velocity code가 1인 경우에만 최대 2개 위성에 대해 궤도 및 시계 보정정보와 그 변화율을 함께 제공하며, 공분산 행렬은 MT 28을 통해 별도로 전송한다. 반면, DFMC SBAS는 MT 32 하나의 메시지 내에 보정정보, 보정정보 변화율, 그리고 공분산 행렬을 모두 동시 제공함으로써 메시지 구조를 단순화하였다.
Table 4. L1 SBAS MT 25 (Velocity code of 1 in the first half).
| Section | Name | Location | Scale factor | Unit | Description | |
|---|---|---|---|---|---|---|
| start | end | |||||
| Velocity code | Velocity code = 1 | 14 | 14 | 1 | – | Velocity code of 1 |
| PRN mask | PRN Mask No. | 15 | 20 | 1 | – | PRN mask number |
| Issue of data | IOD | 21 | 28 | 1 | – | Issue of data |
| Orbit param | δx (ECEF) | 29 | 39 | 0.125 | m | Delta WGS-84 ECEF position, x-axis |
| δy (ECEF) | 40 | 50 | 0.125 | m | Delta WGS-84 ECEF position, y-axis | |
| δz (ECEF) | 51 | 61 | 0.125 | m | Delta WGS-84 ECEF position, z-axis | |
| δaf0 | 62 | 72 | 2–31 | s | Clock offset correction | |
| δx rate-of-change (ECEF) | 73 | 80 | 2–11 | m/s | Delta WGS-84 ECEF position drift, x-axis | |
| δy rate-of-change (ECEF) | 81 | 88 | 2–11 | m/s | Delta WGS-84 ECEF position drift, y-axis | |
| δz rate-of-change (ECEF) | 89 | 96 | 2–11 | m/s | Delta WGS-84 ECEF position drift, z-axis | |
| δaf1 | 97 | 104 | 2–39 | s | Clock drift correction | |
| ti,LT | 105 | 117 | 16 | s | Time of applicability | |
| IODP | IODP | 219 | 119 | 1 | – | Issue of data PRN mask |
| Second half of message | Half of message | 223 | 225 | – | – | Format is the one described for the first half |
이중 주파수 기반 보정 정보의 무결성 정보(DFREI)는 개별 위성에 대해 MT 32를 통해 제공되며, MT 31에서 활성화된 모든 위성에 대해서는 MT 34, 35, 36을 통해 무결성 정보가 제공된다. 이때, MT 34-36의 IODM과 MT 31의 IODM이 일치하는 경우에만 해당 무결성 메시지를 사용한다.
MT 34는 DFREI 값과 DFREI 값의 변화 상태를 나타내는 Dual Frequency Range Error Change Indicator (DFRECI) 값을 함께 제공한다. DFREI는 0부터 15까지의 값을 가지며, 15는 해당 위성이 SBAS 모드에서 사용되지 않음을 의미한다. Table 5는 DFRECI 값에 따른 DFREI 값의 변화 상태를 나타낸다. DFRECI는 2 bits 값으로, 값이 0이면 DFREI에 변화가 없음을, 1이면 DFREI가 변경되었으며 변경된 값이 함께 전송됨을 의미한다. DFRECI 값이 2이면 DFREI 값이 1만큼 증가했음을, 3이면 해당 위성이 SBAS 모드에서 사용되지 않음을 나타낸다.
Table 5. DFREI value change state by DFRECI value.
| DFRECI | State |
|---|---|
| 0(“00”) | Unchanged DFREI |
| 1(“01”) | Changed DFREI |
| 2(“10”) | Active DFREI value increased by a value of one |
| 3(“11”) | Do not use this satellite in SBAS mode |
DFRECI 값이 1인 위성의 개수에 따라 전송되는 메시지 타입은 MT 34 또는 MT 35, 36으로 나뉠 수 있다. 해당 위성이 7개 이하일 경우에는 MT 34를 통해 DFRECI와 함께 변경된 DFREI 값을 전송하며, 메시지 구조는 Table 6에 기술되어 있다. 반면, DFRECI 값이 1인 위성이 8개 이상일 경우에는 DFRECI를 생략하고, 모든 DFREI 값을 직접 전송하는 방식이 사용되며 이때 MT 35와 MT 36이 활용된다. 각각 MT 31의 slot index 1번부터 53번까지, 54번부터 92번까지의 DFREI 값을 포함하며, 메시지 구조는 Tables 7과 8에 제시되어 있다. 이후 각 DFREI 값은 MT 37의 DFREI scale table을 통해 대응되는 오차의 표준편차($\sigma_{DFRE}$)로 변환할 수 있다 (EUROCAE 2023).
Table 6. DFMC SBAS MT 34.
| Section | Name | Location | Scale factor | Unit | Description | |
|---|---|---|---|---|---|---|
| start | end | |||||
| DFRECI | DFRECI 1 | 10 | 11 | 1 | – | DFRE change indicator for augmented slot index 1 |
| to DFRECI 92 | 192 | 193 | 1 | – | to DFRE change indicator for augmented slot index 92 | |
| DFREI | DFREI 1 | 194 | 194 | 1 | – | DFRE indicator 1 |
| to DFREI 7 | 218 | 221 | 1 | – | to DFRE indicator 7 | |
| Reserved | Reserved | 222 | 223 | – | – | Reserved |
| IOD | IODM | 224 | 225 | 1 | – | Issue of data mask |
Table 7. DFMC SBAS MT 35.
| Section | Name | Location | Scale factor | Unit | Description | |
|---|---|---|---|---|---|---|
| start | end | |||||
| DFREI | DFREI 1 | 10 | 13 | 1 | – | DFRE indicator for augmented slot index 1 |
| to DFREI 53 | 218 | 221 | 1 | – | to DFRE indicator for augmented slot index 53 | |
| Reserved | Reserved | 222 | 223 | – | – | Reserved |
| IOD | IODM | 224 | 225 | 1 | – | Issue of data mask |
Table 8. DFMC SBAS MT 36.
| Section | Name | Location | Scale factor | Unit | Description | |
|---|---|---|---|---|---|---|
| start | end | |||||
| DFREI | DFREI 54 | 10 | 13 | 1 | – | DFRE Indicator for augmented slot index 54 |
| to DFREI 92 | 162 | 165 | 1 | – | to DFRE Indicator for augmented slot index 92 | |
| Reserved | Reserved | 222 | 223 | – | – | Reserved |
| IOD | IODM | 224 | 225 | 1 | – | Issue of data mask |
MT 37은 Old But Active Data (OBAD) 파라미터와 DFREI 값에 따른 $\sigma_{DFRE}$의 scale table을 포함한다. DFMC SBAS는 L1 SBAS와 마찬가지로, 보정정보를 적용한 이후의 잔차(residual) 오차에 대한 모델 분산($\sigma^2_{DFC}$)을 계산해야 하며, 이 값은 MT 37에 포함된 Degradation Equation Selector (DES) 값에 따라 Eq. (16)과 같이 달라진다 (EUROCAE 2023).
$$\sigma^2_{DFC} =
\begin{cases}
\left( \sigma_{DFRE} \cdot \delta_{DFRE} \right)^2 + \varepsilon^2_{CORR} + \varepsilon^2_{ER}, & \text{if } DES = 0 \\
\left( \sigma_{DFRE} + \varepsilon_{CORR} + \varepsilon_{ER} \right)^2 \cdot \delta^2_{DFRE}, & \text{if } DES = 1
\end{cases}$$
여기서 $\sigma_{DFRE}$는 DFREI 값에 따른 표준편차로, MT 37의 DFREI Table을 통해 도출되며, $\delta_{DFRE}$는 사용자 위치에 따라 공분산 행렬을 기반으로 계산되는 위치 계수(user location factor)이다. $\varepsilon_{CORR}$는 보정정보에 대한 열화 계수이며, $\varepsilon_{ER}$은 En-route 부터 비정밀 접근(NPA) 까지의 운용 조건에 해당하는 열화 계수이다.
또한, MT 37은 MT 32, MT 39, MT 40의 보정정보에 대한 유효 시간 간격을 정의하는 파라미터 $(\text{I}_{\text{VALID}})_{\text{MT32}}$ 및 $(\text{I}_{\text{VALID}})_{\text{MT39/40}}$를 포함하고 있으며, En-route, terminal, RNP APCH to LNAV minima 운용 조건에서는 해당 유효 시간 간격이 1.5배로 연장되어 적용된다 (EUROCAE 2019, 2023).
DFMC SBAS 사용자도 L1 SBAS와 동일하게 보정정보의 잔차 오차 분산을 이용해 위치의 보호수준을 산출할 수 있다. 사용자 Range 오차 분산($\sigma^2$)은 Eq. (17)과 같이 각 오차 요소들의 분산 합으로 계산할 수 있고, SBAS 모델의 잔차 분산($\sigma^2_{DFC}$)은 3.5절에서 설명한 바와 같이 적용할 수 있다.
$$\sigma^2 = \sigma^2_{DFC} + \sigma^2_{UIRE} + \sigma^2_{tropo} + \sigma^2_{air}$$
DFMC SBAS는 이중 주파수를 활용하여 전리층 지연 오차의 1차항을 제거할 수 있으나, 고차항에 해당하는 전리층 지연오차는 완전히 제거되지 않는다. 이중 주파수의 선형 조합을 통해 대부분의 전리층 지연오차는 보정이 가능하지만, 잔여 오차는 여전히 존재한다. 이에 따라 DFMC SBAS에서도 전리층 지연 오차 분산($\sigma^2_{UIRE}$)이 발생하며, 위성의 고도각($El_{deg}$)을 이용해 Eq. (18)과 같이 계산된다.
$$\sigma_{UIRE} = \frac{40.0}{261.0 + El^2_{deg}} + 0.018 \; \text{[m]}$$
대류권 지연 오차 분산($\sigma^2_{tropo}$)은 L1 SBAS와 동일하게 2.5절의 Eq. (13)과 같이 계산된다. SBAS airborne 오차 분산($\sigma^2_{air}$)은 수신기 잡음, 다중경로(multipath) 및 antenna group delay variation과 전리층 발산에 대한 분산의 합으로, Eq. (19)에 의해 계산된다.
$$\sigma^2_{air} = \sigma^2_{noise} + \sigma^2_{MP\&AGDV} + \sigma^2_{divg}$$
여기서 이중 주파수의 IF 선형 조합에 의해 전리층 발산과 관련된 오차는 사라지기 때문에 $\sigma^2_{divg}$ 값은 0이 된다.
본 논문에서는 기존 L1 SBAS와 DFMC SBAS 간의 보정 정보 및 무결성 정보 제공 방식의 차이를 중심으로, 메시지 구조와 기능을 비교 분석하였다. L1 SBAS는 단일 주파수인 L1 C/A 신호와 GPS 위성만을 기반으로 보정 서비스를 제공하는 구조이다. 이에 따라 위성 관련 오차는 FC(MT 2–5)와 LC(MT 25)로 나누어 보정하고, 전리층 지연 오차는 IGP 기반의 모델을 통해 MT 18과 26에서 보정 정보를 제공한다. 무결성 정보는 UDREI, GIVEI, 공분산 행렬 형태로 MT 6, 7, 10, 26, 28 등에 분산되어 제공되며, 메시지 구조가 복잡하고 처리 부담이 크다. 또한 전체 메시지 전송률이 250 bps로 제한되어 있어, 무결성 정보의 주기적 갱신을 유지하면서도 전체 위성을 보강하기 위해서는 메시지 수가 제한될 수밖에 없으며, 이에 따라 최대 51개의 위성만을 지원하는 구조적 한계를 지닌다.
반면, DFMC SBAS는 L1 및 L5의 이중 주파수를 활용하여 수신기 측에서 IF 선형 조합을 통해 전리층 지연 오차의 1차 항을 제거할 수 있으므로, 별도의 전리층 보정 메시지를 제공하지 않는다. 또한 FC가 제거되고, LC 기반의 보정 값을 단일 메시지(MT 32)를 통해 제공함으로써 메시지 구조를 간소화하였다. MT 32에는 위성 시계 및 궤도 보정 정보, 보정 변화율, 무결성 지표(DFREI), 공분산 행렬이 통합되어 포함되며, MT 34~36은 DFREI가 변한 위성의 개수에 따라 무결성 정보를 선택적으로 전송하는 구조로 재편되었다. 이처럼 단일 메시지 내 통합 제공 구조는 L1 SBAS 대비 구조적 간결성을 크게 향상시켰다. 메시지 효율 개선으로 확보된 전송 여유폭은 다중 위성군 지원에 활용되어, DFMC SBAS는 최대 92개 위성까지 지원할 수 있도록 설계되었다. 이러한 구조적 개선으로 DFMC SBAS는 기존 L1 SBAS의 한계였던 위성 수 제약과 메시지 간 복잡성을 해소하여 확장성과 실용성을 크게 향상시켰다. 또한, 이중 주파수를 활용한 IF 선형 조합을 통해 전리층 지연 오차(IC)를 효과적으로 제거함으로써 전리층 변동성이 큰 지역에도 10-12 m 수준의 VPL 성능을 제공할 수 있으며, 서비스 적용 범위 또한 확대되었다.
DFMC SBAS는 서비스 사용자에게 높은 정확성과 무결성을 보장하는 보정 정보를 제공하여 향상된 사용자 위치 성능을 보장한다. 현재 국제적으로 DFMC SBAS에 대한 연구가 활발히 진행 중이며, 이를 통해 다양한 분야에서 위치 서비스의 품질이 더욱 개선될 것으로 전망된다. 대한민국은 KASS 구축을 통해 세계 7번째 SBAS 보유국이 되었으므로, 국제적인 흐름에 맞는 DFMC SBAS에 대한 연구 개발이 이루어질 것으로 기대한다.
This work was supported by the Agency for Defense Development by the Korean Government (UD230019TD).
Conceptualization, J.L. and B.P.; methodology, J.L. and B.P; formal analysis, J.L. and Y.J; investigation, J.L. and Y.J; writing—original draft preparation, J.L.; writing—review and editing, B.P. and D.K.; visualization, J.L.; supervision, B.P.
The authors declare no conflict of interest.
Dennis, J. 2024, Dual-Frequency Multiple Constellation (DFMC) Standards Progress and other technical updates, SatNav News Winter 2024, 77, 5
EUROCAE 2019, ED-259 Minimum Operational Performance Standard for Galileo/Global Positioning System/Satellite-Based Augmentation System Airborne Equipment, February 2019, 81-97
EUROCAE 2023, ED-259A Minimum Operational Performance Standard for Dual-Frequency Multi-Constellation Satellite-Based Augmentation System Airborne Equipment, September 2023, 405-429, 443-482
Houllier, C., Foch, C. B., Comelli, G., Lee, B.-S., Son, M., et al. 2024, Korea Augmentation Satellite System (KASS): System Performance Qualification Result Overview, Inside GNSS, [Internet], cited 2025 Feb 15, available from https://insidegnss.com/korea-augmentation-satellite-system-kass-system-performance-qualification-result-overview/
ICAO 2017, SARPs for GNSS elements and signals – SBAS L1-L5, DFMC SBAS Key Concepts, October 2017, 1-4
ICAO 2018, Concept of operations (CONOPS) for dual-frequency multi-constellation (DFMC) global navigation satellite system (GNSS), the ICAO Navigation Systems Panel, CONOPS V6.4, 27 April 2018
ICAO 2023, Annex 10 to the Convention on International Civil Aviation Aeronautical Telecommunications Volume 1 Radio Navigation Aids Eighth Edition, July 2023, ATT D-21-D-26
Kee, C., Park, B., Kim, J., Cleveland, A., Parsons, M., et al. 2008, A Guideline to Establish DGPS Reference Station Requirements, Journal of Navigation. 61, 99-114. https://doi.org/10.1017/S0373463307004304
Kim, D. 2007, A Study on Correction Generation Algorithms for Wide Area Differential GNSS, PhD Dissertation, Seoul University.
Kim, J., Song, J., No, H., Han, D., Kim, D., et al. 2017, Accuracy Improvement of DGPS for Low-Cost Single-Frequency Receiver Using Modified Flächen Korrektur Parameter Correction, ISPRS International Journal of Geo-Information, 6, 222. https://doi.org/10.3390/ijgi6070222
Lee, Y. & Park, B. 2022, Nonlinear Regression-Based GNSS Multipath Modelling in Deep Urban Area, Mathematics, 10, 412. https://doi.org/10.3390/math10030412
Lee, Y., Hwang, Y., Ahn, J.-Y., Seo, J., & Park, B. 2023a, Seamless Accurate Positioning in Deep Urban Area Based on Mode Switching Between DGNSS and Multipath Mitigation Positioning, IEEE Transactions on Intelligent Transportation Systems, 24, 5856-5870. https://doi.org/10.1109/TITS.2023.3256040
Lee, Y., Wang, P., & Park, B. 2023b, Nonlinear Regression-Based GNSS Multipath Dynamic Map Construction and Its Application in Deep Urban Areas, IEEE Transactions on Intelligent Transportation Systems, 24, 5082-5093. https://doi.org/10.1109/TITS.2023.3246493
Lim, C. 2017, Proposal of Change of L1 SBAS Message and Performance Verification for Multi-Constellation SBAS, master Dissertation, Sejong University.
Lim, C., Park, B., & Kee, C. 2017, Efficiency Improvement of the Current SBAS System by Removal of RRC and Fast Correction, In Proceedings of the 2017 International Technical Meeting of The Institute of Navigation, Monterey, California, 30 Jan – 2 Feb 2017, pp.619-626. https://doi.org/10.33012/2017.14879
Lim, C., Park, B., &Yun, Y. 2023, L1 SFMC SBAS Message for Service Expansion of Multi-Constellation GNSS Support, IEEE Access, 11, 81690-81710. https://doi.org/10.1109/ACCESS.2023.3300580
Park, B., Lim, C., Wang, J., & Morton, Y. T. J. 2022, Horizontal Drift Velocity and Dimensions of Ionospheric Irregularities Using ROT From a GNSS Receiver Array, IEEE Transactions on Geoscience and Remote Sensing, 60, 1-14. https://doi.org/10.1109/TGRS.2022.3186839
Park, K. & Seo, J. 2021, Single-Antenna-Based GPS Antijamming Method Exploiting Polarization Diversity, IEEE Transactions on Aerospace and Electronic Systems, 57(2), 919-934. https://doi.org/10.1109/TAES.2020.3034025
RTCA 2006, DO-229D Minimum Operational Performance Standards for Global Positioning System / Wide Area Augmentation System Airborne Equipment, December 2006
RTCA 2016, DO-229E Minimum Operational Performance Standards for Global Positioning System/Satellite-Based Augmentation System Airborne Equipment, December 2016
Walter, T., Blanch, J., & Enge, P. 2013, Implementation of the L5 SBAS MOPS, In Proceedings of the 26th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2013), Nashville, TN, September 2013, 814-824.
Yoon, H., Seok, H., Lim, C., & Park, B. 2020, An Online SBAS Service to Improve Drone Navigation Performance in High-Elevation Masked Areas, Sensors, 20, 3047. https://doi.org/10.3390/s20113047
Yoon, M. & Lee, J. 2014, Medium-scale traveling ionospheric disturbances in the Korean region on 10 November 2004: Potential impact on GPS-based navigation systems, Space Weather, 12, 173-186. https://doi.org/10.1002/2013SW001002