Seung-Gyu Yang![]() , ByungHyun Choi
, ByungHyun Choi![]() , Young-Jin Song
, Young-Jin Song![]() , Jong-Hoon Won†
, Jong-Hoon Won†![]()
Autonomous Navigation Lab., Department of Electrical and Computer Engineering, Inha University, Incheon 22212, Korea
†Corresponding Author: Jong-Hoon Won, E-mail: jh.won@inha.ac.kr
Citation: Yang, S.-G., Choi, B.H., Song, Y.-J., & Won, J.-H. 2025, OTA Test of KPS Civil Signal Candidates by Using Reconfigurable Multi-Constellation Frequency GNSS Signal Generation Simulator, Journal of Positioning, Navigation, and Timing, 14, 173-183.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2025 June, Volume 14, Issue 2, pages 173-183. https://doi.org/10.11003/JPNT.2025.14.2.173
Received on May 07, 2025, Revised on May 13, 2025, Accepted on May 28, 2025, Published on Jun 15, 2025.
Copyright © The Institute of Positioning, Navigation, and Timing
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
This paper presents a reconfigurable Global Navigation Satellite System (GNSS) signal generation simulator that supports multi-constellation and multi-frequency signal generation, including Korean Positioning System (KPS) civil candidate signals in the L6 and S bands. The generator allows flexible configuration of Pseudo Random Noise (PRN) code, modulation, and navigation message. To validate the performance of the simulator, digital Intermediate Frequency (IF) signal tests and Over the Air (OTA) experiments using a Software Designed Receiver (SDR) were conducted. The results confirm successful signal generation, acquisition, tracking, and positioning. Despite interference in the S band, the generator can be effectively applied for candidate signal evaluation and future KPS signal development.
KPS, signal generator, reconfigurability, OTA
Global Navigation Satellite System (GNSS)의 중요성은 지속적으로 증가하고 있으며 현대인의 삶에 핵심 요소가 되고 있다. 이에 여러 강대국들의 자체 GNSS 서비스 운영과 함께 현대화 계획 추진을 통한 위성 신호의 개발이 활발해지고 있다. 이러한 추세에 따라 우리나라 또한 한국형 위성 항법 시스템인 Korean Positioning System (KPS) 개발을 진행중이다. 2022년부터 KPS 개발에 본격 착수하였고, 발표된 계획에 따르면, 2027년 위성 1호기 발사를 시작으로 2034년까지 전체 위성 배치를 완료할 계획이다 (Park & Heo 2019).
KPS 예상 신호는 L1, L2, L5 대역의 Global Positioning System (GPS)과 유사한 신호 외에도, L6 및 S 대역의 KPS 독자적 신호를 송출할 계획이다. 이에 따라 L6 및 S 대역에서의 KPS 항법 신호 개발을 위한 위성 항법 신호 설계 연구가 활발히 진행되고 있다 (Lee et al. 2021, Han et al. 2022).
새로운 위성 항법 시스템의 개발을 위해서 항법 신호 설계 시 기존 GNSS 신호 및 KPS 신호로 고려될 수 있는 다양한 후보 신호들의 성능 평가 및 분석 환경이 요구된다. 이때, 후보 항법 신호의 성능을 종합적으로 시험/평가하기 위해서는 시뮬레이터 개발을 통한 정교한 신호 설계가 필요하다. 일례로 KPS 후보 신호를 설계하기 위해 신호설계 매개변수 변경에 따라 위성 1기에 해당하는 단일채널 신호의 다양한 Figure of Merits (FoM)을 평가하는 형태의 해석적/수치적 신호설계 소프트웨어 툴이 개발되었다 (Shin et al. 2019, Han & Won 2019). Table 1에 나와 있듯이, 해석적 신호설계 소프트웨어 툴의 경우 식을 기반으로 신호의 각 요소들을 매개변수화하고 설계한 신호를 분석할 수 있다. 또한 수치적 신호설계 소프트웨어 툴은 신호 생성 및 수신 전 과정의 GNSS 신호 체인을 시뮬레이션터 상에서 수치적으로 신호 처리 결과를 분석할 수 있다. 이러한 소프트웨어 기반의 신호설계 툴들은 설계 신호 및 시스템의 성능을 평가하는 데 적합한 성능을 가지며, 높은 유연성으로, 후보 항법 신호 식별을 저비용으로 제공하는 효율적인 솔루션을 제공한다 (Lim et al. 2008). 하지만 두 소프트웨어 툴로는 신호처리 과정의 항법 성능까지는 시험해보기 힘들다. 따라서 식별된 후보 신호 설계 매개변수를 복수의 위성에 적용하여 항법 성능까지 시험해 볼 수 있는 신호 생성 시뮬레이터가 필요하다.
본 논문은 미래 GNSS/KPS 신호 가상환경의 설계 및 시뮬레이션을 통해 KPS의 항법 신호를 생성 및 검증할 수 있는 Radio Frequency (RF) 수준 신호 생성 시뮬레이터를 소개한다. 해당 생성기는 Multi-constellation/frequency 기능 지원을 통해 다양한 GNSS 민간 신호들을 동시에 생성하고, 재구성 확장 기능을 지원하는 형태로 구성된다. 이러한 재구성 확장 기능은 기존 GNSS 신호와 더불어 새로운 신호에 대해 Pseudo Random Noise (PRN) 및 Secondary 코드, 변조 방법, 항법 메시지 등의 신호 생성 변수들을 적은 노력과 비용으로 단시간에 다양하게 변경하여 새로운 신호를 용이하게 생성할 수 있는 특징을 가진다. 즉, 변조 방법, 항법 메시지 등이 아직 결정되지 않은 KPS 민간 후보 신호에 대해서도 생성이 가능하고 생성 신호를 활용한 신호 분석 역시 가능하다. 이에 본 논문은 해당 신호 생성기를 통해 생성한 신호를 Software Defined Radio (SDR)에 적용하여 KPS 신호 후보군 검증을 진행한다. SDR을 통한 검증 이후, 실제 신호 수신 환경과 유사한 Over The Air (OTA) 환경에서 신호를 송수신하여 결과를 분석한다. 즉, 신호 생성과 수신 및 처리 전과정에 OTA 방법을 사용하여 설계된 신호에 대한 생성, 송신, 수신, 신호 처리 등 일련의 KPS 시스템 신호 체인 전과정을 수행한다.
본 논문의 구성은 다음과 같다. 2장에서는 기존 GNSS 신호 및 KPS 후보 신호로 확장 가능한 신호 생성기의 재구성 가능한 특성을 가지는 시스템 구조를 제시한 후, 각 부에 대해 소개한다. 이후 3장에서 KPS almanac 정보와 GNSS/KPS 신호 생성기를 이용한 KPS 후보 신호 생성과정을 소개하며, 4장에서 Digital Intermediate Frequency (IF) 신호를 SDR을 통해 처리한 결과를 제시한다. 이후 5장에서 OTA 실험 환경에 대해 소개하며, SDR을 통한 OTA 실험 결과를 제시한다. 마지막 6장에서 결론 제시를 통해 논문을 마무리한다.
Table 1. Signal simulator.
| Simulator | Description |
|---|---|
| Analytic simulator (Han & Won 2019) | Generate elements of the parameters and analyze the performance of the designed signal |
| Numerical simulator (Shin et al. 2019) | Simulate the signal GNSS signal chain and analyze the results numerically |
| Signal simulator (Choi et al. 2023) | Generate the signal by adjusting to user requirements and signal characteristics |
Fig. 1은 본 논문에서 사용한 생성기의 전체적인 구조를 나타낸다. 먼저 입력부에서 Graphic User Interface (GUI) 입력과 Almanac 데이터, 그리고 GNSS 매개변수 입력 Configuration file을 선택한 신호에 맞게 불러오게 된다. 이후 Almanac 데이터를 기반으로 위성 위치를 생성하고 이를 GUI를 통해 입력된 데이터를 기반으로 채널 별로 위성과 사용자 사이 다이나믹에 의한 시변 매개변수인 코드 지연, 도플러 주파수, 반송파 위상과 항법 메시지를 생성한다. 이후 PRN, Secondary 코드를 불러와 Baseband 대역과 IF 대역의 신호가 생성되는 구조이다. 해당 구조에서 입력 부분은 모두 재구성 가능한 구조로 구성되어 있다. 특히 GNSS 매개변수 입력 configuration file은 소스 코드 형태로 구성되어, 각 신호 별 중심 주파수, 변조방법, 칩 변화율, 항법 메시지, 데이터 전송 속도 등의 신호 특성도 변경 가능한 형태로 구현하였다. 특히 이는 구조체 형식으로 구현되어, 신호에 관계없이 같은 형태로 구성되어 이를 생성하는 데 용이하게 구성되어 있다. 따라서 사용자는 궁극적으로 기존 GNSS 신호 외에 새로운 KPS 후보 신호군에 대해서도 유연하게 효율적으로 생성이 가능하며, 원하는 후보 신호군에 대해 다양한 시나리오 생성이 가능하다. 해당 생성기를 통한 기존 GNSS 신호의 검증은 연구실의 기존 논문을 통해 진행되었다 (Choi et al. 2023).
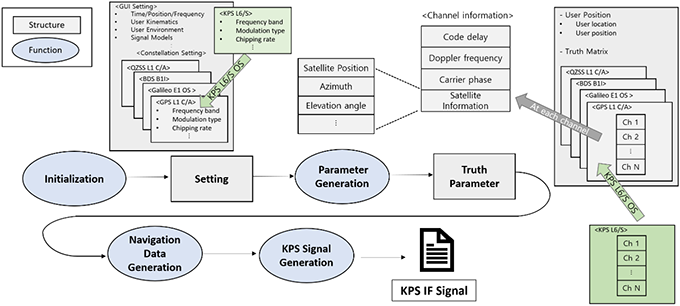
Fig. 1. WAAS outages (FAA 2024) and EGNOS continuity map (ESSP 2024).
본 논문에서 소개하는 소프트웨어 기반의 신호 생성기는 기존의 GNSS 신호들 및 임의의 신호 후보군에 대해 신호를 생성할 수 있으며 이를 GUI 형태로 사용자 입력을 받아 생성하게 된다. Fig. 2는 본 논문에서 제시하는 GNSS/KPS 신호 생성기의 GUI 입력 부이다.
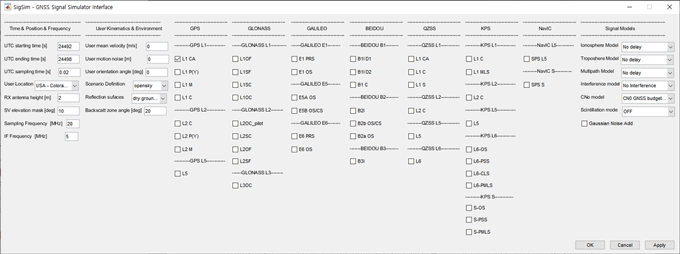
Fig. 2. GUI of GNSS KPS signal generator.
GUI의 각 요소들은 Table 2와 같으며, 해당 요소들의 값을 자유롭게 변경 가능한 형태로 구현하였다. 먼저 신호 생성 시간에 관련된 항목으로, Universal Coordinated Time (UTC) 시작/종료 시간은 신호 생성 시작 시간과 종료 시간이다. 이는 Almanac 정보를 기반으로 생성하므로 한 주가 기준이며, 적절한 범위는 0~604,800 sec가 된다. UTC sampling time은 신호 생성 간 간격으로 신호 규격이 적합하다는 가정 하에 자유롭게 설정이 가능하다. 예를 들어 20 ms로 설정한다면 신호 관련 파라미터 정보와 신호 블록이 각 20 ms 간격으로 생성된다. 이 기능을 활용하여 최고 속도 및 고기동 상황 등 사용자 다이나믹 요구사항에 따른 가변적인 신호 생성 주기 설정이 가능하다. 이후 사용자 위치와 Rx antenna height, Space Vehicle (SV) elevation mask 등의 설정을 통해 사용자 위치와 안테나 각도, Elevation mask 값 등을 설정 가능하다. 사용자 위치는 사전에 저장된 값을 이용하는데, 필요 시 추가가 가능한 형태로 구성하였다. 또한, 신호의 샘플링 주파수와 중간주파수 값을 자유롭게 변경 가능한 형태로 설계하여 사용자 수신기 스펙에 대응하는 신호생성이 가능하도록 구현하였다.
Table 2. GUI input parameters of GNSS/KPS signal generator.
| Parameter | Variable name | Description |
|---|---|---|
| Time, position, frequency | UTC starting time | Signal generation start (s) |
| UTC ending time | Signal generation end time (s) | |
| UTC sampling time | Sampling interval time (s) | |
| User Location | Receiver location (Global) | |
| Rx antenna height | Antenna of receiver height (m) | |
| SV elevation mask | SV cut-off angle (deg) | |
| Sampling frequency | Sampling frequency (MHz) | |
| Intermediate frequency | Intermediate frequency (MHz) | |
| User kinematics, environment | User mean velocity | User average velocity (m/s) |
| User motion noise | User move motion noise (m) | |
| User orientation angle | User beam angle (deg) | |
| Scenario definition | Open sky/1 wall/2 wall scenario | |
| Reflection surface | Dry / Medium Wet / Wet ground | |
| Backscatt zone angle | Backscattered zone angle (deg) | |
| Signal model | Ionosphere model | No Delay / Klobuchar model |
| Troposphere model | No Delay / Saastamonien model / Collins model | |
| Multipath model | No Delay / Geometry-based model | |
| Interference model | Various interference models | |
| CN0 model | CN0 GNSS budget link / 3D elevation | |
| Scintillation mode | ON/OFF | |
| Gaussian noise add | ON/OFF | |
| GNSS signals | N/A | GPS, Galileo, BDS, QZSS, NavIC, KPS |
User kinematics 및 환경부에서는 사용자의 속도와 각도, 주변 환경에 대한 신호 반사 조건 등에 대해 설정 가능하다. 또한 신호 모델부에서 이온층, 전리층, 멀티패스 등에 대한 모델을 설정하여 해당 조건을 고려하여 신호를 생성할 수 있도록 구현되었다.
마지막으로, 신호 선택부에서 원하는 신호를 자유롭게 선택하여 신호를 생성하게 된다. 현재 일부 KPS 후보 신호에 대해 선택이 가능한 형태로 구성하였으며, 다양한 신호 파라미터를 용이하게 변경 가능한 구조로 구성되어 있다.
Almanac 파일은 6개의 Keplerian 요소 등의 정보를 포함하고 있으며, 이를 이용하여 각 위성의 위치를 얻을 수 있다. 본 연구에서 적용한 KPS almanac data의 경우에는 기존에 발표된 연구결과물을 적용하였다 (Seo et al. 2020). 따라서, 4개의 IGSO 위성과 3개의 GEO 위성에 대한 파라미터 값을 설정하고, 이를 기반으로 KPS 후보 신호를 생성하였다. 해당 파라미터는 Table 3과 같다.
Table 3. KPS almanac parameters used in simulation (Seo et al. 2020).
| Satellite | semi-major axis (km) | Eccentricity | Inclination angle (deg) | Right ascension of the ascending node (deg) | Argument of perigee (deg) | True anomaly (deg) |
|---|---|---|---|---|---|---|
| GEO1 | 42164 | 0 | 0 | 0 | 0 | 227.825 |
| GEO2 | 42164 | 0 | 0 | 0 | 0 | 227.825 |
| GEO3 | 42164 | 0 | 0 | 0 | 0 | 177.825 |
| IGSO1 | 42164 | 0.075 | 42 | 218 | 270 | 98.8866 |
| IGSO2 | 42164 | 0.075 | 42 | 128 | 270 | 188.873 |
| IGSO3 | 42164 | 0.075 | 42 | 38 | 270 | 278.761 |
| IGSO4 | 42164 | 0.075 | 42 | 308 | 270 | 8.77481 |
KPS 민간 신호 설계 시에는 제한된 주파수 대역 내에서의 다양한 제약 조건들을 만족해야 한다. 먼저, PRN 코드는 한 칩 내에 정수 개의 반송파 사이클이 존재하여야 하고, 코드 칩 속도는 기준 주파수 10.23 MHz를 분주하여 만들 수 있는 구조가 되어야 한다. 또한, 타 시스템 신호와의 동일 대역 내에서 호환성을 고려하여야 하는데 이는 ITU 전파규칙을 준수하여야 함을 의미한다. 본 논문에서는 이에 근거하여, L6와 S 대역의 민간 후보 신호 기준을 다음과 같이 설정하였다.
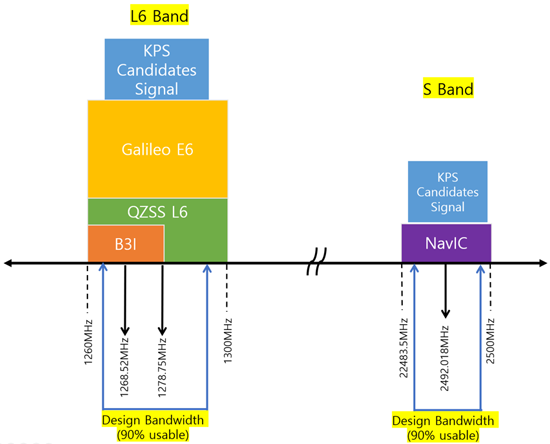
Fig. 3. Signal plan on L6 and S bands.
본 연구에서는 기존 L6 대역 항법신호의 반송파 주파수인 1278.75 MHz와, S 대역의 2492.028 MHz을 고려한다. Fig. 3과 같이 L6 대역에는 Galileo E6 및 BDS B3, QZSS L6 신호가 존재하며, S 대역에서는 NavIC S 신호가 송출되고 있으며, 해당 대역에 추가적으로 KPS 후보 신호가 적용될 예정이다. 단, TimeMultiplexed Binary Offset Carrier (TMBOC), Composite BOC (CBOC) 등의 변조 기법의 지적 재산권 문제와 신호 처리 난이도 등의 향상으로 인해 후보 시나리오에서는 Binary Phase Shift Keying (BPSK) 및 BOC 변조 기법만을 고려한다.
신호 대역폭은 실제 위성 탑재체에서 대역 내의 신호 왜곡을 고려하여야 하므로 L6 대역의 40 MHz 내의 90% 이내인 36 MHz에서만의 시나리오를 고려한다. 이는 비교적 S대역에 비해 넓은 대역폭이지만 기존 신호들이 다수 존재하여 신호 호환성에서의 단점이 존재한다. 이에 비해 S 대역은 다른 주파수 대역 대비 대역을 공유하는 항법신호의 수가 적다는 장점이 있지만 좁은 주파수 대역폭의 제약이 있다. 설계 대역폭은 L6 대역과 마찬가지로 사용 가능 대역폭 16.5 MHz의 90%에 해당하는 14.85 MHz를 설계 대역폭으로 가정하였다. 이에 따른 본 연구에서 적용한 KPS 후보 신호 시나리오는 Table 4와 같이 BPSK(1), BPSK(2), BOC(1,1)을 사용하였다 (Han 2023).
Table 4. KPS civil signal candidates used in simulation (Han 2023).
| Signal | Modulation type | Carrier wave frequency (MHz) | Bandwidth limit (MHz) |
|---|---|---|---|
| L6 – SN1 | BPSK(1) | 1278.75 | 36 |
| L6 – SN2 | BPSK(2) | ||
| L6 – SN3 | BOC(1,1) | ||
| S – SN1 | BPSK(1) | 2492.028 | 14.85 |
| S – SN2 | BPSK(2) | ||
| S – SN3 | BOC(1,1) |
OTA 실험에서는 실험 간 통제가 어려운 주파수 대역 주변의 잡음이 존재하므로, 이러한 영향을 최소화하고 생성된 신호가 정상적으로 생성되었는지를 확인하기 위해 사전에 Digital IF signal을 생성하여 파일로 저장한 후 후처리 방식으로 검증을 우선 진행하였다.상용 수신기로는 상용 신호 외의 수신이 어려우므로, 재구성 가능한 형태의 SDR을 이용하였다. RF front-end 부를 제외한 수신기부가 소프트웨어적으로 구현된 SDR은 사용자 선택에서의 유연성을 가져 개발 중인 신호의 검증을 위한 수신기로 사용하기에 용이하다 (Song et al. 2021).
현재 KPS 후보 신호는 아직 확정되지 않았으므로 본 논문에서는 L6/S 대역 신호를 Table 4와 같은 임의로 파라미터를 적용하여 구성하였다. 일요일 자정을 기준으로 Almanac 파일의 Time of applicability 값인 518,400초부터 300초의 신호를 생성하였고, 3.2절의 연구 결과에 기반한 변조 방법을 적용하였다. 샘플링 주파수에 의한 항법 성능 결과가 달라질 수 있으므로, 샘플링 주파수와 중간주파수를 통일하였다. 항법 메시지는 LNAV를 사용하였다.
추가적으로 해당 신호 생성기는 소프트웨어 기반으로 다양한 수신 기준점을 설정할 수 있기 때문에, 본 연구에서는 KPS 후보 신호에 중점을 맞추어 대한민국 국토지리정보원에서 제공하는 위성기준점을 기준으로 수신기 위치를 설정하여 실험을 진행하였다. 본 실험에서 사용한 수신기의 Latitude, Longitude, Height는 인천(37.450727, 126.657019, 23), 철원(38.273227, 127.145211, 289), 제주도(33.513993, 126.529820, 50)로 설정하여 한반도 남한 면적을 최대한 넓게 포함하도록 설정하였다. 특히, 국내 도서산간 환경에서의 수신기 위치를 반영하여 진행하였다. 다만, 이번 실험에서는 정적인 사용자 위치를 가정하고 실험하였으며, 이는 추후 동적인 환경으로의 확장이 요구된다. 또한, 간섭의 영향을 최소화하기 위해 이온층, 전리층 등의 간섭 관련 파라미터는 모두 적용하지 않은 환경에서 실험을 진행하였다. 이밖에 실험 파라미터는 Table 5와 같다.
Table 5. Parameters of KPS civil signal candidates used in simulation.
| Parameters | KPS L6 band | KPS S band | ||||
|---|---|---|---|---|---|---|
| Generation time (sec) | 300 | 300 | 300 | 300 | 300 | 300 |
| Modulation type | BPSK (1) | BPSK (2) | BOC (1,1) | BPSK (1) | BPSK (2) | BOC (1,1) |
| Center frequency (MHz) | 1278.75 | 1278.75 | 1278.75 | 2492.028 | 2492.028 | 2492.028 |
| PRN code | GPS L1 C/A | BDS B1I | NavIC L5 | GPS L1 C/A | BDS B1I | NavIC S |
| Chipping rate (Mcps) | 1.023 | 2.046 | 1.023 | 1.023 | 2.046 | 1.023 |
| Primary code length (chips) | 1023 | 2046 | 1023 | 1023 | 2046 | 1023 |
| Data rate (bps) | 50 | 50 | 50 | 50 | 50 | 50 |
| Navigation data | LNAV | LNAV | LNAV | LNAV | D1 | LNAV |
| Sampling frequency (MHz) | 20 | 20 | 20 | 20 | 20 | 20 |
| IF (MHz) | 5 | 5 | 5 | 5 | 5 | 5 |
| Receiver position | Incheon | Jeju | Cheorwon | Incheon | Jeju | Cheorwon |
이번 실험에서 생성한 신호들의 각 Power Spectral Density (PSD)는 Fig. 4와 같으며, 이를 통해 각각 중심주파수 근처에서 신호 별 변조 방식인 BPSK(1), BPSK(2), BOC(1,1)의 형태가 제대로 생성됨을 확인할 수 있다. 신호 획득 결과는 Fig. 5와 같이 나타났으며, 실제 생성 시 인가한 참값의 코드 지연량과 도플러 주파수 값을 획득하는 것을 확인하였다. 또한, 이 때의 각각의 IQ diagram인 Fig. 6에서 초기의 transient time 이후 원점을 기준으로 좌우 두 대칭 지점에 값이 모인 형태를 보였다. 마지막으로, 각 신호들이 Fig. 7과 같은 prompt correlator 결과를 보이며, 이것을 통해 신호 추적 또한 적절히 수행된 것을 확인할 수 있었다.
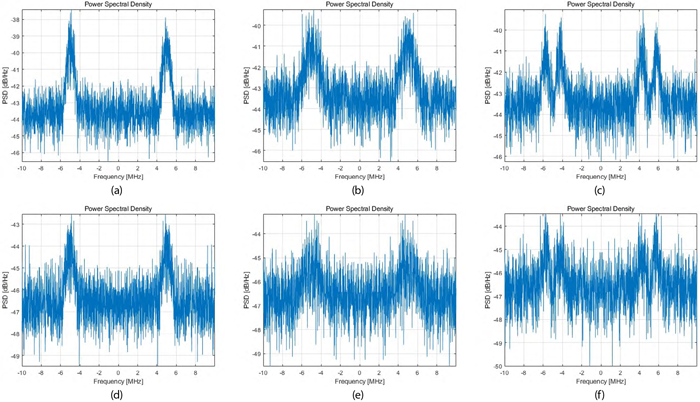
Fig. 4. Power spectral density of KPS signal candidates in digital IF signal test: (a) L6-SN1, (b) L6-SN2, (c) L6-SN3, (d) S-SN1, (e) S-SN2, and (f) S-SN3.
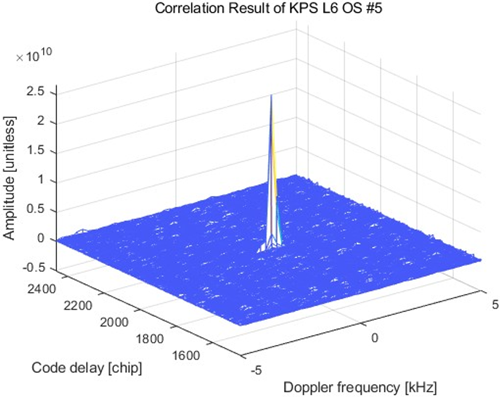
Fig. 5. Acquisition result of KPS signal candidate (L6-SN1) in digital IF signal test.
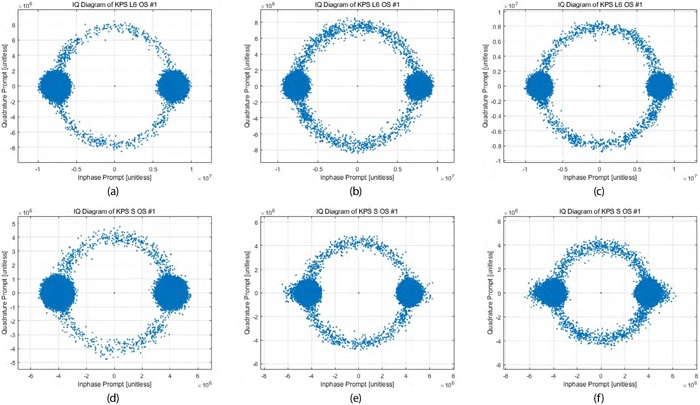
Fig. 6. I/Q diagram of KPS signal candidates in digital IF sample test: (a) L6-SN1, (b) L6-SN2, (c) L6-SN3, (d) S-SN1, (e) S-SN2, and (f) S-SN3.
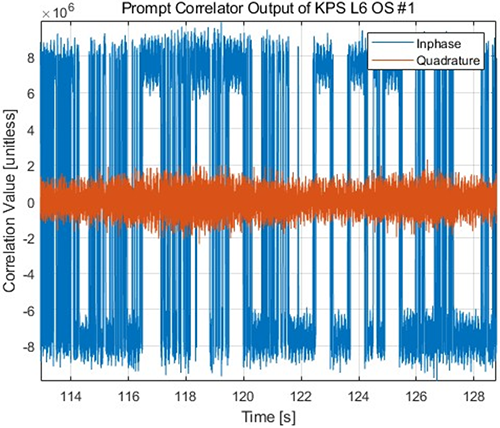
Fig. 7. Prompt correlator of KPS signal candidate in digital IF signal test.
신호 추적 이후 수신기 별로 설정한 위치 지점에서의 Single Point Positioning (SPP) 위치 추정 결과는 Fig. 8과 같이 나타났다. 이 때, 전체적으로 기준점에서 동쪽 방향으로 수십 미터 이내의 바이어스 오차가 존재하며, 이는 수신기 위치 별 유사한 bias 경향을 보인다. 본 논문에서는 위치 추정 결과의 출력을 보이기 위해 원점으로 중심을 맞추어 위치 추정 결과를 표현하였다. 이 때 각각의 신호 별 mean error와 standard deviation은 Table 6과 같다. mean error의 경우 bias의 영향으로 20 ~ 30 m 정도의 오차가 있지만, standard deviation의 경우 1 ~ 5 m 정도의 오차를 확인할 수 있다. 해당 위치를 추정한 KPS 위성의 sky plot은 Fig. 9와 같이 나타났다. 이 때의 GDOP/PDOP/HDOP/VDOP/TDOP은 3.13/2.59/1.82/1.84/1.76로 대체적으로 3 이하의 값을 확인할 수 있다. 이상의 신호 획득, 신호 추적, 위치 추정 결과 분석을 통해 KPS 실험 신호들이 디지털 상에서 제대로 생성된 것을 확인할 수 있다.
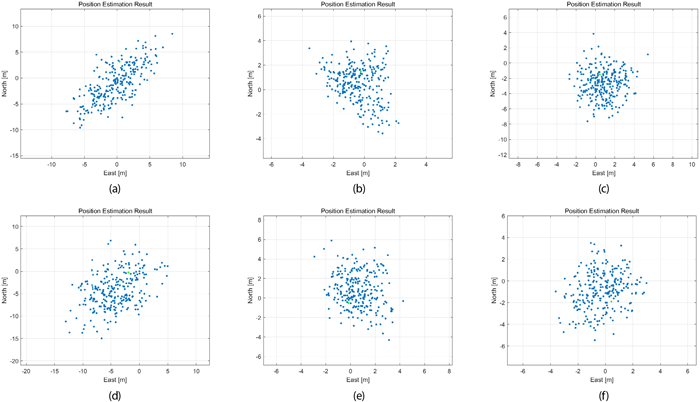
Fig. 8. SPP result of KPS signal candidates in digital IF signal test: (a) L6-SN1, (b) L6-SN2, (c) L6-SN3, (d) S-SN1, (e) S-SN2, and (f) S-SN3.
Table 6. Digital IF sample test result of KPS signal.
| Signal | Modulation type | Mean error (m) | Standard deviation (m) |
|---|---|---|---|
| L6 – SN1 | BPSK(1) | 29.0932 | 2.7889 |
| L6 – SN2 | BPSK(2) | 38.3115 | 1.7398 |
| L6 – SN3 | BOC(1,1) | 25.7277 | 2.4866 |
| S – SN1 | BPSK(1) | 39.9775 | 2.9729 |
| S – SN2 | BPSK(2) | 25.7795 | 1.6185 |
| S – SN3 | BOC(1,1) | 23.8149 | 5.1985 |
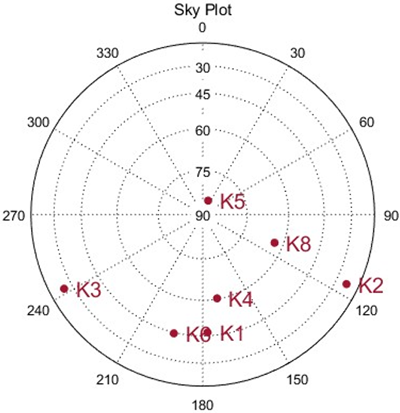
Fig. 9. Skyplot of KPS in digital IF sample test.
본 실험은 실제 위성신호를 수신하는 것과 같은 환경에서 테스트하기 위해 OTA 실험 환경으로 구성하였다. 이는 신호 송·수신 간 자유 공간을 지나며 실제 신호 수신 환경과 유사한 환경에서의 신호 처리와 평가가 가능하다.
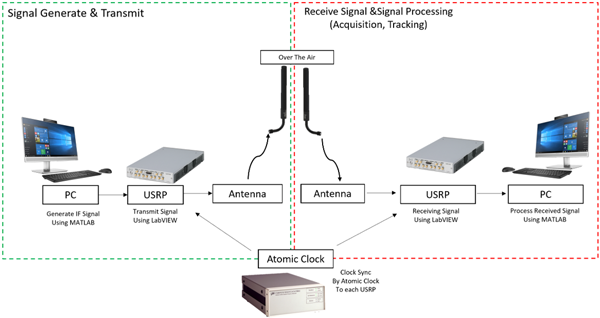
Fig. 10. SOTA test setup.
실험 환경은 Fig. 10과 같이 구성하였으며, 먼저 PC 1에서 GNSS/KPS 신호 생성기를 이용하여IF 신호를 생성한 후, LabVIEW 기반의 신호 송신 소프트웨어를 이용하여 Universal Software Radio Peripheral (USRP) 송신기를 거쳐 L6 대역 또는 S 대역에서의 RF 레벨 신호를 발생시킨다. 이후, PC 2에 연결된 USRP receiver를 통해 신호를 수신하고 LabVIEW 기반의 수신 소프트웨어를 이용하여 PC 2 상에서 저장한다. 이후 PC 2에서 SDR을 이용하여 처리한다. 이 때의 송·수신 과정에서 USRP에 내장된 발진기는 정확도가 낮아 별도의 원자 시계를 이용한 시각 동기화를 진행하였다. 이 때의 신호 송·수신 환경은 Table 4와 같이 구성하였으며 신호 생성 시간은 마찬가지로 300초의 신호를 사용하였다. 이는 사용자의 입력에 따라 자유롭게 변경 가능하고, OTA 실험환경에서는 USRP를 활용 시, 버퍼 크기에 따라 적절한 시간의 신호를 생성하도록 하여야 한다.
신호 생성 파라미터는 앞선 IF 실험의 파라미터인 Table 5와 동일하게 적용하였으며, 사용한 수신기 위치도 IF signal 테스트와 동일하게 적용하여 실험을 진행하였다.
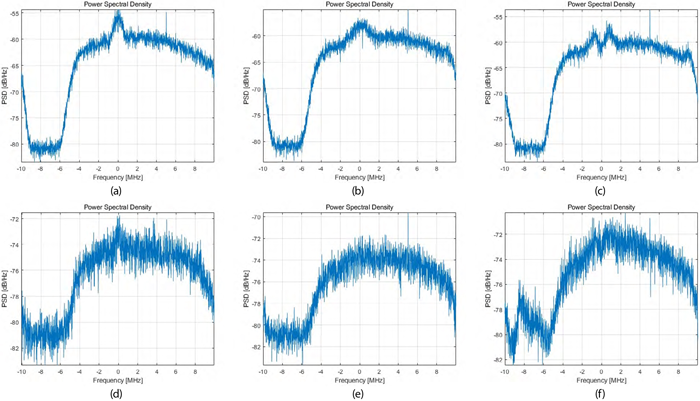
Fig. 11. Power spectral density of KPS signal candidates in OTA test: (a) L6-SN1, (b) L6-SN2, (c) L6-SN3, (d) S-SN1, (e) S-SN2, and (f) S-SN3.
OTA 실험을 통해 SDR에서 확인한 생성한 신호들의 각 PSD는 Fig. 11과 같으며, L6와 S 대역 주파수인 1278.75 MHz와 2492.028 MHz에 생성한 신호의 변조 방법과 동일한 형태의 PSD를 확인할 수 있다. 다만, S 대역에서의 OTA 실험에서는 주변 환경의 영향을 L6 대역에 비해 많이 받는 환경으로, 잡음에 의해 L6 대역보다는 가려지는 경향을 보인다. Acquisition 결과는 Fig. 12와 같이 나타났으며, 마찬가지로 생성한 참값 파라미터 값과 동일한 것을 확인하였다.
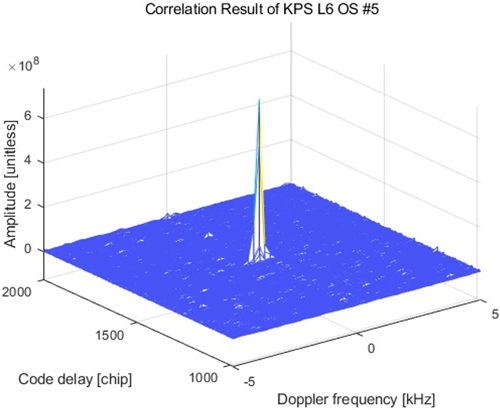
Fig. 12. Acquisition result of KPS signal candidate (L6-SN1) in OTA test.
IQ diagram과 prompt correlator 결과는 Figs. 13, 14와 같이 나타나며, Tracking 또한 정상적으로 수행된 것을 확인하였다. 수신기 별로 설정한 위치 지점에서의 KPS L6 신호들의 SPP 위치 추정 결과는 Fig. 15와 같이 나타났으며, 지역별로 bias가 걸리는 형태가 IF test와 동일한 것 또한 확인하였다. 각각의 신호 별 Dilution Of Precision (DOP)과 mean error, standard deviation 값은 Table 7과 같다. Mean error는 20 ~ 30 m 수준, standard deviation은 2 ~ 3 m 정도의 오차가 확인된다. 마찬가지로 이 때의 GDOP/PDOP/HDOP/VDOP/TDOP은 3.18/2.65/1.87/1.88/1.76로 대체적으로 3 이하의 값을 얻었고, OTA 실험이 제대로 진행되었음을 확인할 수 있다.
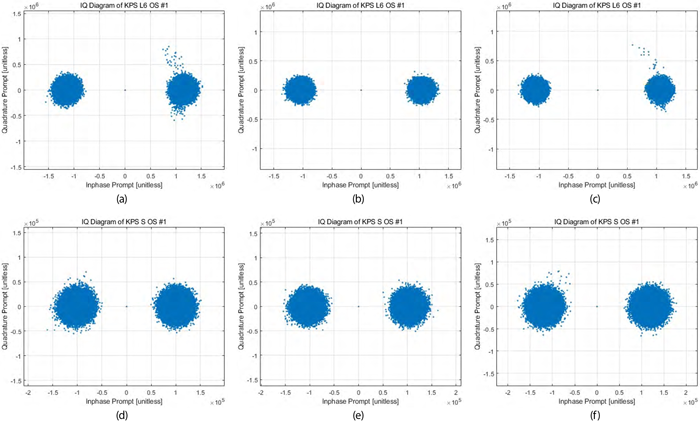
Fig. 13. I/Q diagram of KPS signal candidates in OTA test: (a) L6-SN1, (b) L6-SN2, (c) L6-SN3, (d) S-SN1, (e) S-SN2, and (f) S-SN3.
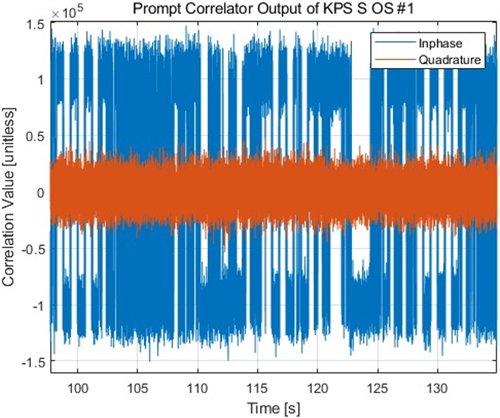
Fig. 14. Prompt correlator of KPS signal candidates in OTA test.
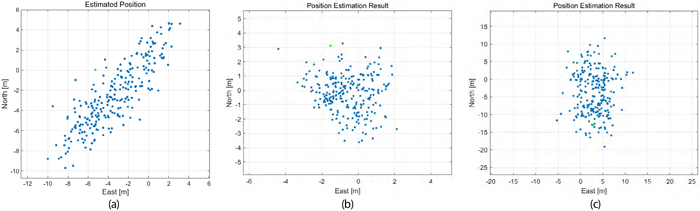
Fig. 15. SPP result of KPS signal candidates in OTA test: (a) L6-SN1, (b) L6-SN2, (c) L6-SN3.
Table 7. OTA test result of KPS signal.
| Signal | Modulation type | Mean error (m) | Standard deviation (m) |
|---|---|---|---|
| L6 – SN1 | BPSK(1) | 37.6077 | 3.0730 |
| L6 – SN2 | BPSK(2) | 35.5726 | 2.6694 |
| L6 – SN3 | BOC(1,1) | 25.7685 | 2.4538 |
하지만 실험 과정에서 S 밴드 실험 시, 신호에 잡음이 발생하여 정상적으로 SPP 결과가 추정되지 않는 상황이 간헐적으로 발생했다. 이는 KPS에서 사용되는 L6 대역과 S 대역 중 L6 대역에서의 기존 GNSS 신호와 Pulse 정도의 간섭만이 존재하지만, S 대역의 경우에는 LTE 주파수와 Wi-fi, 전자레인지 등의 주파수 간섭이 존재하기 때문으로 추정된다 (Han et al. 2021). 본 연구에서는 S 대역의 KPS 후보 신호만 존재하는 독립적인 환경의 구현이 어려워 주변 환경의 변화로 인해 이러한 오차 경우가 발생하는 것으로 예상된다. 따라서, 추후 실제 KPS 후보 신호 방송을 위해 이에 대한 분석이 추가적으로 요구된다.
본 논문에서는 재구성 가능한 GNSS/KPS 소프트웨어 생성기를 사용하여 KPS L6/S 대역 민간 후보 신호에 대한 OTA 기반 항법 실험을 수행하였다. 이는 기존의 GNSS 신호 및 사용자의 입력에 따른 KPS 신호를 생성할 수 있으며, ITU 규격과 FoM을 고려한 변조 방식을 선택한 민간 후보 신호를 생성, 재구성 가능한 형태의 GNSS/KPS 소프트웨어 수신기를 활용하여 항법 솔루션 결과를 얻었다. 향후 이러한 생성기의 Reconfigurability 특성을 이용하여 기존 GNSS 신호와 KPS 후보 신호들의 생성 및 실험 과정에서 사용할 수 있을 것으로 기대되며, 추후 bias에 대해 추가적인 보정과 통제된 환경에서의 OTA 실험을 통해 KPS 후보 신호 선정에 기여할 수 있을 것으로 기대된다.
본 연구는 한화에어로스페이스(주) 연구개발과제(CT250414003)의 지원을 받아 수행되었습니다.
Conceptualization, Yang, S.-G., Choi, B. and Won, J.-H.; methodology, Yang, S.-G., Choi, B. and Won, J.-H.; software, Yang, S.-G., Choi, B.; validation, Yang, S.-G., Choi, B., Song, Y.-J. and Won, J.-H.; formal analysis, Yang, S.-G., Choi, B. and Song, Y.-J.; investigation, Yang, S.-G., Choi, B. and Song, Y.-J.; resources, Yang, S.-G., Choi, B. and Won, J.-H.; data curation, Yang, S.-G., Choi, B. and Song, Y.-J.; writing—original draft preparation, Yang, S.-G., writing—review and editing, Yang, S.-G., Song, Y.-J. and Won, J.-H.; visualization, Yang, S.-G.; supervision, Won, J.-H.; project administration, Won, J.-H.; funding acquisition, Won, J.-H.
The authors declare no conflict of interest.
Choi, B., Song, Y.-J., Lee, S., & Won, J.-H. 2023, Design of a fully reconfigurable multi-constellation and multi-frequency GNSS signal generator, Journal of Positioning, Navigation, and Timing, 12, 295-306. https://doi.org/10.11003/JPNT.2023.12.3.295
Han, K. 2023, Exploration of optimized waveforms for new RNSS signals in L6 and S bands, Doctoral dissertation, Inha University, South Korea.
Han, K. & Won, J.-H. 2019, Development of MATLAB-based signal performance analysis software for new RNSS signal design, Journal of Positioning, Navigation, and Timing, 8, 139-152. https://doi.org/10.11003/JPNT.2019.8.4.139
Han, K., Lee, S., Lee, K., & Won, J.-H. 2022, Performance analysis for secured service signals of RNSS systems, Journal of Positioning, Navigation, and Timing, 11, 341-349. https://doi.org/10.11003/JPNT.2022.11.4.341
Han, K., Song, Y.-J., & Won, J.-H. 2021, A study on the effects of out-of-band interference on RNSS receivers in S-band, In Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation, September 20-24, 2021, St. Louis, MO, pp.796-802. https://doi.org/10.3301/2021.17930
Lee, S., Han, K., & Won, J.-H. 2021, RF compatibility analysis of GNSS and KPS signals at L6/S-band, Journal of Positioning, Navigation, and Timing, 10, 21-28. https://doi.org/10.11003/JPNT.2021.10.1.21
Lim, S., Lim, D. W., Liu, M., Moon, S. W., Park, C., et al. 2008, Design of a software-based multi-channel GNSS IF signal generator, In 2008 International Conference on Control, Automation and Systems, 14-17 October 2008, Seoul, Korea, pp.754-758. https://doi.org/10.1109/ICCAS.2008.4694599
Park, J. U. & Heo, M. B. 2019, Korea PNT Update, 59th Meeting of the Civil GPS Service Interface Committee, Miami, Florida, 16-17 Sep 2019.
Seo, J.-H., Lim, D. W., Shin, M., Joo, J., & Heo, M.-B. 2020, A study on performance analysis of KPS orbit design range, 2020 IPNT Conference, Nov 11-13, Yeosu, Korea, pp.359-362. https://ipnt.or.kr/2020proc/56
Shin, H., Han, K., & Won, J.-H. 2019, Development of end-to-end numerical simulator for next generation GNSS signal design, Journal of Positioning, Navigation, and Timing, 8, 153-164. https://doi.org/10.11003/JPNT.2019.8.4.153
Song, Y.-J., Lee, H. B., & Won, J.-H. 2021, Design of multi-constellation and multi-frequency GNSS SDR with fully reconfigurable functionality, Journal of Positioning, Navigation, and Timing, 10, 91-102. https://doi.org/10.11003/JPNT.2021.10.2.91