Junwoo Jung1†![]() , Hyunhee Won1
, Hyunhee Won1![]() , Daeyoung Park1
, Daeyoung Park1![]() , Seungmin Kang1
, Seungmin Kang1![]() , Jonggyu Go1
, Jonggyu Go1![]() , Seungbok Kwon1
, Seungbok Kwon1![]() , Kwi Woo Park2
, Kwi Woo Park2![]() , Bongwoo Jo2
, Bongwoo Jo2![]() , Woogeun Ahn3
, Woogeun Ahn3![]() , Sung Wook Yun3
, Sung Wook Yun3![]()
1LIG Nex1, Seongnam, Kyeonggi-do 13488, Korea
2Duksan Navcours, Daejeon 34014, Korea
3Agency for Defense Development, Daejeon 34602, Korea
†Corresponding Author: Junwoo Jung, E-mail: junu.jung@gmail.com
Citation: Jung, J., Won, H., Park, D., Kang, S., Go, J., Kwon, S., Park, K.W., Jo, B., Ahn, W., & Yun, S.W., 2024, Proposed Test Method for Verification of Survivability Improvement of KASS Augmented Navigation of a Beam-formed GPS Receiver, Journal of Positioning, Navigation, and Timing, 13, 257-268.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2024 September, Volume 13, Issue 3, pages 257-268. https://doi.org/10.11003/JPNT.2024.13.3.257
Received on Aug 01, 2024, Revised on Aug 21, 2024, Accepted on Sep 01, 2024, Published on Sep 15, 2024.
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
The Korea Augmentation Satellite System (KASS) satellite was successfully launched and service is being started. By receiving messages transmitted from the KASS satellite, users can employ the messages to improve positioning accuracy or to verify the integrity of Global Positioning System (GPS). In this paper, we propose a test method for a beam-formed GPS receiver developed to improve the survivability of KASS augmented messages that can enhance positioning accuracy even in an environment with jamming or interfering signals. Through the test method proposed in this paper, quantitative verification is performed for a beam-formed GPS receiver aimed at maintaining the augmented navigation solution to which KASS augmented messages are applied by tracking the KASS signal as much as possible under conditions where the jamming signal strength is gradually increasing. In addition, the proposed test method includes three conditions; first, a static lab test method for repeated verification of functions under the same conditions; second, a static outdoor test method for performance verification in an operating environment of a platform equipped with the beam-formed GPS receiver; and finally, a dynamic lab test method for performance verification of a moving platform equipped with the beam-formed GPS receiver toward a jammer. In this paper, we propose a method for simulating the jamming signal incident direction through the phase delay of an RF cable designed to prevent unintentional jamming signal emission in both lab and outdoor tests, and a method of applying test software for injecting a jamming signal to compare the survivability performance consistently according to the presence or absence of beamforming signal processing. Through the proposed test method, it was verified that the augmented navigation solution could be output for a longer time period when the beamforming signal processing was applied to the KASS satellite signal in the beam-formed GPS receiver.
KASS, survivability improvement, beam-formed GPS receiver, test method
정지궤도 위성을 사용하여 넓은 지역을 대상으로 서비스하는 위성기반 보강항법 시스템(Satellite Based Augmentation System, SBAS)은 Global Positioning System (GPS) 위성신호를 수신하는 위성항법장치에 다양한 요인으로 발생하는 위성 시계 및 궤도 오차, 전리층 지연 오차들을 방송하는 SBAS 메시지 내 포함된 fast/long-term 및 ionospheric correction 정보를 활용하여 위치정확도를 향상시키고, GPS 위성신호의 무결성 및 연속성을 보장하는 시스템이다 (Park et al. 2020). 최근 우리나라에서 SBAS 표준을 따르는 한국형 항공위성시스템(Korea Augmentation Satellite System, KASS) 위성이 성공적으로 발사되어 2023년 12월부터 항공용 서비스 제공을 포함하여 방송하고 있다 (Park et al. 2023). 국방 분야에서도 이러한 KASS 위성 신호를 수신할 수 있는 위성항법장치를 향후 개발한다면 보다 정확한 위치정확도를 위성항법장치가 탑재된 플랫폼에 제공할 수 있게 되며, 국방 분야에서의 위성항법장치에는 재밍 및 악의적인 간섭 신호에 대응하기 위해 GPS 위성신호의 생존성을 높이기 위한 빔포밍 신호처리 기능을 포함하는 연구가 진행되고 있다 (Jung et al. 2023).
본 논문에서는 GPS 재밍 또는 악의적인 간섭 신호가 있는 환경에서도 위치정확도를 향상시킬 수 있는 KASS 보정정보의 생존성 향상을 위해 개발된 빔포밍 위성항법장치의 시험평가 방안을 제안한다. 시험평가 대상인 빔포밍 위성항법장치에서 KASS 보정정보의 생존성을 향상시키기 위해서는, 첫째, KASS 위성을 통해 수신하는 보정정보의 우선순위를 고려한 타임아웃이 발생할 때까지 보정정보를 활용하는 것이 필요하고, 둘째, KASS 위성신호를 최대한 오랫동안 놓치지 않고 추적하여 보정정보를 오래 수신받는 것도 중요하다. KASS 위성신호 측정치를 항법해 연산에 활용할 수도 있지만, 본 논문에서 고려하고 있는 시험평가 대상인 빔포밍 위성항법장치에서는 KASS 보정정보만을 활용하는 수신기를 고려하고 있기 때문에 오랫동안 정상 수신할수록 생존성이 증가한다.
KASS 역시 SBAS 표준을 따르고 있기 때문에 표준에서 명시된 SBAS 메시지 종류에 따라 최대 업데이트 주기 및 타임아웃 주기가 상이하다 (RTCA SC-159 2016). 최근까지 다양한 메시지 스케줄링 연구를 통해 최대 업데이트 주기 내에서 SBAS 메시지를 전송하기 위한 방법들이 연구되었다. 업데이트 주기가 짧은 메시지는 고정하고 이외 메시지들은 동적으로 할당하여 최대 업데이트 주기를 만족시키는 스케줄링 기법 (Walter et al. 2020), GPS 기만을 배제하기 위한 클럭 보정 메시지의 최대 업데이트 주기를 조정하여 인증 메시지를 추가한 스케줄링 기법 (Song et al. 2024), 그리고 KASS 시스템을 운용하는 환경을 고려하여 보정항법을 빠르게 시작하기 위해 전리층 보정 메시지를 주기를 조정한 스케줄링 기법 (Yun et al. 2016)과 같은 연구들이 수행되었다. 상기 메시지 스케줄링 연구들과 같이 표준을 만족하는 메시지 스케줄링이 적용된 SBAS 시스템에서 전송하는 보정 메시지들은 메시지 별 타임아웃 주기를 가지고 있으며, 타임아웃에 대한 기준은 RTCA 표준 및 미국 SBAS 시스템인 WAAS에서 제공하고 있다 (RTCA SC-159 2016, Walter et al. 2020). SBAS 보정 메시지 중 가장 짧은 타임아웃 주기는 fast correction 메시지가 가지고 있으나, RTCA 표준에서 언급하고 있듯이 일부 지상시스템에서는 fast correction 메시지로 인해 타임아웃이 자주 발생하지 않도록 타임아웃 주기를 조정하고 있다. 본 논문에서 고려하고 있는 위성항법장치에서는 KASS 보정정보를 활용함에 있어 KASS 신호의 GPS L1 신호 대비 낮은 수신세기와 국방분야의 위성항법장치가 장착된 플랫폼의 빠른 기동 특성으로 인해 KASS 신호 추적을 놓칠 수 있는 환경을 고려하여야 한다.
또한 본 논문에서는 KASS 위성신호를 최대한 놓치지 않고 추적하여 보정정보를 오래 수신하여 KASS 신호의 생존성을 향상시킬 수 있는 방법으로 KASS 위성신호로의 빔포밍 기능이 탑재된 GPS 위성항법장치를 고려하고 있다. 최근, 빔포밍 기능을 활용하여 KASS 보정정보의 생존성을 향상시킬 방안에 관련된 유사 연구들이 진행되었다. KASS 보정정보 신호 대역인 GPS L1 대역을 포함한 GNSS 위성신호에 영향을 주는 교란신호인 재밍과 기만신호에 대응하기 위한 GNSS 위성신호로의 빔포밍 또는 minimum variance distortion-less ratio (MVDR) 알고리즘을 적용하여 개발한 위성항법장치에 대한 연구들이 진행되었다 (Lee et al. 2022, Jung et al. 2023). 상기 연구들에서 제안된 빔포밍 기능 또는 MVDR 알고리즘을 GNSS 위성신호 대신 수신한 KASS 위성신호 방향으로 적용하면 교란 신호에 대한 대응 및 KASS 신호 추적성능 향상에 도움이 되어 KASS 보정정보의 생존성을 향상시킬 수 있다.
본 논문에서 제안하는 상기 KASS 보정정보의 생존성을 향상시킬 위성항법장치에 대한 시험평가 방안으로 첫째 항상 동일한 정지 조건에서 기능의 반복 검증을 위한 정적 랩시험 방안과, 둘째 실제 위성항법장치가 운용되는 유사 환경에서 정지 조건의 반복 성능 검증을 위한 정적 야외시험 방안, 셋째 위성항법장치가 장착된 이동 플랫폼을 모의하여 위성신호 및 재밍신호가 인가되는 동적 랩시험 방안을 제안하였다. 본 논문에서 시험평가를 위해 재밍신호 입사방향을 모의한 시험환경 구축 방법과, KASS 위성신호에 대한 빔포밍 신호처리 적용 유무에 따른 KASS 보정항법의 생존 능력을 일관되게 비교하기 위해 설계된 재밍신호 인가 시험평가용 소프트웨어를 적용한 시험평가 방법을 본문을 통해 상세 설명하고 있다. 또한 재밍신호 인가 시험평가용 소프트웨어는 유도탄과 같은 플랫폼이 가지는 기동 특성을 모의한 시뮬레이터가 포함된 환경에서도 KASS 보정항법의 생존 능력을 평가할 수 있음을 본문을 통해 제시하고 있다.
본 논문의 구성은 다음과 같다. 2장에서는 본 논문에서 제안하는 시험평가 환경 구축 방법과 제작한 재밍신호 인가 시험평가용 소프트웨어를 설명하고 있다. 3장에서는 제안하는 시험평가 환경을 구성하여 KASS 신호에 대한 빔포밍 기능을 탑재한 위성항법장치의 랩 및 야외 조건에서 KASS 보정항법의 생존성 시험평가 결과를 분석하였다. 4장에서는 제안하는 시험평가 방법의 의미를 설명하고 추후 발전 방향을 제안하고 마무리한다.
본 논문에서는 KASS 보정정보의 생존성 향상을 위한 KASS 위성신호를 지향하는 빔포밍 위성항법장치의 시험평가 방안을 제안한다. 본 논문은 민간과 국방 분야를 모두 고려하고 있지만, 국방 분야에서는 필수로 재밍신호가 인가되는 것을 가정하고 있기에 위성신호 보다 훨씬 높은 세기의 재밍신호가 인가되는 환경을 고려하여 시험평가에 사용하는 재밍 신호세기는 민간 분야에서 발생할 수 있는 일반적인 잡음보다 높은 신호를 가정하여 시험평가 방안을 수립한다. 또한 국방 분야의 위성항법장치가 장착된 플랫폼은 재밍 신호세기가 점차 높아지는 방향으로의 이동을 고려하는 경우가 많기 때문에, 위성항법시스템의 신호 스펙에서 정의하고 있는 GPS L1 coarse/acquisition (C/A) 신호의 최저 위성 신호세기 (GPS Navstar 1995)를 시작으로 하여 점점 높여가는 재밍 신호 발생 시나리오를 시험평가 시나리오로 고려하였다.
또한 본 논문에서 고려하고 있는 KASS 보정정보의 생존성과 관련하여 KASS 내 다양한 타입의 SBAS 메시지들을 조합하여 위성신호 내 포함된 수신기 외부 환경 조건에의 한 오차를 보정하고 있으며, 이는 크게 fast/long-term 및 ionospheric correction 메시지들로 나눌 수 있다 (Park et al. 2020). KASS 역시 SBAS 표준을 따르고 있으며, GPS 의사거리 측정치를 보정하기 위해 KASS로부터 전달되는 의사거리 보정정보는 GPS $k$번째 위성의 의사거리 측정치, $\psi_k$를 고려하여 생성된다.
$$\psi_k = r_k + c B_k + E_k + I_k + T_k + cb + v$$
식 (1)에서 $r_k$는 $k$번째 GPS 위성과 사용자간 거리를, $cB_k$는 $k$번째 GPS 위성의 클럭 바이어스 옵셋 $B-k$와 빛의 속도 $c$와의 곱을 각각 의미한다. $E_k$ , $I_k$와 $T_k$는 $k$번째 GPS 위성으로부터의 궤도정보 오차, 전리층 지연값, 대류층 지연값을 각각 의미한다. $cb$는 수신기의 클럭 바이어스 옵셋 $b$와 빛의 속도 $c$와의 곱을 의미하며, $v$는 평균 0을 가지는 백색 가우시안 잡음 분포(additive white Gaussian noise, AWGN)를 따르는 수신기 측정치 잡음을 의미한다.
SBAS 표준을 따르는 KASS 시스템에서는 GPS 신호를 수신하는 수신기에서 위성신호의 무결성을 검증하고 의사거리 측정치를 보정하기 위해 식 (1)에서 포함하고 있는 세 종류의 보정 파라미터를 정지 궤도의 위성으로부터 주기적으로 전송하고 있다. 첫째로 fast correction은 SBAS 표준에서 정의하고 있는 2개의 파라미터, pseudo-range correction (PRC)와 range rate correction (RRC)를 포함하고 있다. 이러한 fast correction은 SBAS 메시지 종류 2번 ~ 5번을 통해 매 6초에서 60초 사이 이하의 주기를 통해 전송된다. 둘째로 SBAS 메시지 종류 24번과 25번을 통해 전송되는 long-term correction은 앞서 설명한 fast correction과 함께 연산하여 수신한 GPS 위성의 궤도오차와 클럭 바이어스 옵셋을 제거할 수 있다. SBAS 메시지 종류 24번과 25번은 상대적으로 좀 더 긴 시간인 120초 이하 주기를 통해 전달된다. 셋째로 ionospheric correction 파라미터는 격자모양의 전리층 지도와 해당 격자 위치에서의 수직 전리층 지연값을 SBAS 메시지 종류 18번과 26번 메시지들을 통해 각각 제공된다. 수신기에서는 전리층 격자 위치(ionospheric grid point, IGP)를 사용하여 수신기와 해당 위성간의 전리층 관통 위치(ionospheric pierce point, IPP)에서의 전리층 지연값을 계산하여 전리층 지연값을 보상한다. 전리층 보정정보를 포함하고 있는 SBAS 메시지 종류 18번과 26번은 앞선 두 종류의 보정 파라미터 보다 긴 전송주기를 가지고 있으며, 300초 이하의 전송주기를 통해 전달된다.
앞서 설명하고 있는 전송주기는 SBAS 표준에 명기된 최대 전송주기에 대한 설명이며, 실제 KASS를 포함하여 SBAS 표준을 따르고 있는 시스템에서는 앞서 언급한 참고논문과 같이 구현 메시지 종류, 개수 및 목적에 따라 메시지 스케줄링에 의해 실제 전송주기가 결정된다 (Han et al. 2011). 본 논문에서 시험평가 대상으로 고려한 위성항법장치에서는 국방 분야에서 KASS 보정정보를 활용하는데 있어 GPS 신호의 무결성 확보 보다 측정치를 보정하여 얻을 수 있는 위치정확도의 측면에서 보다 높은 우선순위를 가지고 활용하는데 초점이 맞춰져 있다. KASS를 포함한 SBAS 표준을 따르는 SBAS 신호를 수신하여 보정항법을 수행하는 위성항법장치들에서는 목적에 따라 보정항법의 타임아웃을 달리 가져가고 있다. KASS 신호의 GPS L1 신호 대비 상대적으로 낮은 수신세기와 국방분야의 위성항법장치가 장착된 플랫폼의 빠른 기동 특성을 가지는 운용 환경을 고려하여, KASS 보정 메시지들 중 위성항법장치의 가장 큰 오차를 보상하는 전리층 보정 메시지의 타임아웃 주기인 600초를 본 논문의 시험평가 대상인 위성항법장치에서는 KASS 보정항법의 타임아웃 주기로 설정하고 있다. 또한 시험평가 대상의 위성항법장치에서는 KASS 신호의 의사거리 측정치를 다른 GPS L1 신호들의 의사거리 측정치와 함께 사용하여 항법해를 추출하는데 사용하지 않고, KASS 신호에 포함된 SBAS 보정정보만을 사용하여 앞서 설명한 식 (1)에서의 GPS k번째 위성의 의사거리 측정치가 포함하고 있는 cBk, Ek와 Ik 값을 세 종류의 KASS 보정 파라미터를 통해 상쇄시키고 있다.
위성항법장치에서 KASS 보정정보의 생존성을 높이는 가장 대표적인 방법으로 본 논문의 시험평가 대상에서 고려하고 있는 빔포밍 위성항법장치에서 KASS 위성으로의 빔포밍 신호처리를 수행함으로써 위성신호의 추적 성능을 높이는 방법이다. 이를 통해 재밍 신호세기가 점점 올라가는 환경에서도 위성항법장치는 보다 긴 시간 동안 KASS 위성신호를 놓치지 않고 정상적으로 보정 메시지를 수신함으로써 지속적으로 보정된 항법해를 출력할 수 있다. 본 논문의 시험평가 대상인 위성항법장치는 GPS L1 신호 대역에 신호 획득/추적을 수행하여 GPS L1 위성신호와 KASS 위성신호를 포함한 SBAS 신호를 추적할 수 있으며, 디지털 빔포밍 신호처리를 수행하기 위해 5개 패치 안테나로 구성된 배열 안테나와 연결하여 동작 가능한 위성항법장치를 선정하였다. 또한 본 논문에서 대상으로 사용한 위성항법장치는 GPS L1 위성신호에 대해서는 빔포밍 신호처리를 상시 운용하고, KASS 위성신호에 대해서는 빔포밍 신호처리 유무를 통해 시험평가 방안의 효과를 비교 분석하였다. 제안하는 시험평가 방안은 GPS L1 위성신호 및 SBAS 위성신호에 대해 빔포밍을 수행할 수 있는 위성항법장치라면 모두 적용이 가능하기 때문에 본 논문에서 시험평가 대상으로 선정한 위성항법장치로만 본 논문이 제한되지 않는다. 또한 본 논문에서는 재밍 신호가 높아지는 환경에서 보정된 항법해를 출력할 수 있는 최대 시간을 분석하여 위성항법장치의 생존성에 대한 시험평가 방법을 제안하고 있다.
이러한 시험평가 방법을 적용하는 환경은 목적에 따라 두 가지의 시험 환경으로 나눌 수 있다. 항상 동일한 조건에서 기능의 반복 검증을 위한 랩시험 방안과 실제 위성항법장치가 탑재되는 플랫폼이 운용되는 환경에서 성능 검증을 위한 야외시험 방안으로 나눌 수 있다. 본 논문에서 시험평가를 위해 랩시험 및 야외시험에서 의도하지 않은 재밍신호의 방출을 막기 위해 설계된 RF 케이블의 위상지연을 통해 재밍신호 입사방향을 모의한 방법과, 빔포밍 신호처리 적용 유무에 따른 생존 성능을 일관되게 비교하기 위해 제작된 재밍신호 인가 시험평가용 소프트웨어를 적용한 방법을 시험평가의 상세 방안으로 제안하였다.
배열안테나로 동시에 수신되는 위성신호와 재밍신호는 배열안테나를 구성하는 단일 패치간 이격거리와 안테나로 입사되는 신호의 방향에 따라 패치 간 위상지연 차이가 발생한다. 실제 배열안테나에 수신되는 위성신호의 경우 입사한 방향과 동일한 위상을 유지해야 하지만, 재밍신호의 경우 입사되는 방위각과 앙각의 방향을 모의할 수 있도록 패치간 위상지연 차를 모의하여 재밍신호를 인가하여 주도록 제안한다. Fig. 1은 재밍신호가 5소자 배열안테나로 수신될 때 패치 간 이격거리와 재밍신호의 입사 방향에 따른 신호의 위상 지연을 보여주고 있다. Fig. 1의 재밍신호 사이의 위상지연은 안테나의 단일 패치간 이격거리 d와 재밍신호 입사각 θ에 따른 거리차, d × cos(θ)에 상응하는 1번 패치 대비 위상지연, Δφ = φ1 – φo, 여기에서 φ1은 1번 패치의 위상값, φo는 1번 패치 외 패치의 위상값을 의미하며, Fig. 1에서의 2번 패치의 경우 φ2로 표현할 수 있다.
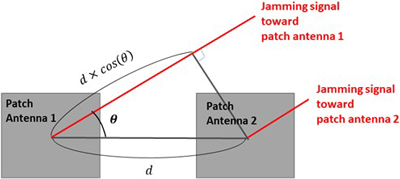
Fig. 1. Phase delay difference based on patch antenna relative distance and jamming signal incidence angle.
Table 1과 Fig. 2는 재밍신호 입사각을 방위각 90도와 앙각 0도로 모의하여 RF 케이블을 통해 배열안테나 2번 패치와 3번 패치 사이에서 앙각 0도인 수평 방향으로 입력되도록 RF 케이블 길이를 설계하여 1번 패치 대비 타 패치의 설계한 위상지연차와 실제 측정한 위상값을 보여주고 있다. Fig. 2에서는 재밍신호 입사각을 모의하여 제작한 5개 RF 케이블의 GPS L1 주파수를 중심으로 한 1 GHz 대역에서의 이득과 위상값을 보여주고 있다. Fig. 2 각 그림의 위쪽 부분은 제작한 GPS L1 대역에서의 이득을 보여주고 있으며 재밍신호 입사각을 모의하기 위해 위상차를 설계하여 제작한 5개 RF 케이블의 이득 편차가 0.1 dB 이하로 큰 편차가 없음을 확인할 수 있다. Fig. 2 각 그림의 아래쪽 부분은 +180도 ~ -180도의 범위에서 측정한 GPS L1 대역에서의 위상값을 보여주고 있으며 이는 위상차를 설계하여 제작한 주요한 값으로 Fig. 2 각 그림 상단에 위상값을 강조하여 표현하였다. 패치 간 설계한 재밍신호의 위상지연 값은 배열안테나의 각 패치 위치와 모의하는 입사방향에 따라 결정하였으며, RF 케이블 위상지연은 RF 케이블 길이와 선재의 유전체에 의해 결정된다. Table 1에서와 같이 재밍신호 입사각을 모의하여 설계한 길이로 제작한 RF 케이블에 대해 Fig. 2에서 측정한 위상값으로 1번 패치 대비 위상지연차를 분석하여 설계한 값들의 유효성을 검증하였다.
Table 1. Satellite classification.
| Patch antenna number (Relative position to patch 1 [x-axis (mm), y-axis (mm)]) | Estimated phase delay relative to patch 1, Δφ (deg.) | Designed RF cable length (mm) | Measured phase value (deg.) | Measured phase delay relative to patch 1, Δφ (deg.) |
|---|---|---|---|---|
| 1 ([0.0, 0.0]) | 0 | 560 | 67.6 | 0 |
| 2 ([-56.5, -56.5]) | -106.8 | 520 | 174.0 | -106.4 |
| 3 ([-56.5, +56.5]) | -106.8 | 520 | 175.0 | -107.4 |
| 4 ([+56.5, +56.5]) | +106.8 | 600 | -38.3 | +105.9 |
| 5 ([+56.5, -56.5]) | +106.8 | 600 | -38.0 | +105.6 |
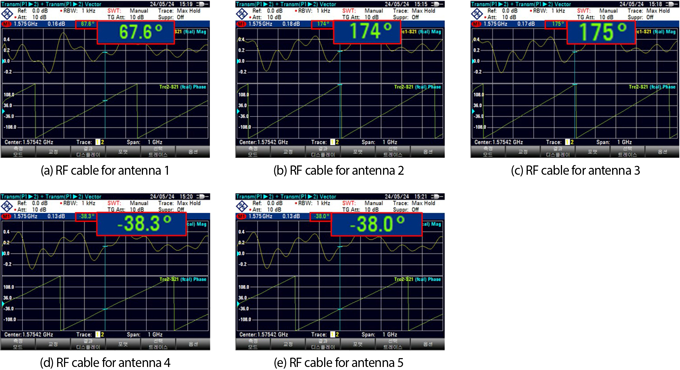
Fig. 2. Measured phase values of RF cables of five antennas for simulated jamming signal.
Table 2와 Fig. 3에서 RF 케이블로 주입하는 GPS L1 신호는 배열안테나의 천장 방향인 앙각 90도에서 입력되도록 RF 케이블 길이를 설계하여 1번 패치 대비 타 패치의 설계한 위상지연차와 실제 측정한 위상값을 보여주고 있다. Fig. 3에서는 앞선 재밍신호 입사각을 모의한 그림과 같이 천장 방향의 GPS L1 위성신호 입사각을 모의하여 제작한 5개 RF 케이블의 GPS L1 주파수를 중심으로 한 1 GHz 대역에서의 이득과 위상값을 보여주고 있으며, 주요 정보인 측정한 위상값은 Fig. 3 각 그림 상단에 강조하여 표현하였다. Fig. 3에서 제작한 RF 케이블로 입력하는 GPS L1 위성신호는 천장 방향에서 입사되도록 모의하기 위해 RF 케이블 간 위상차가 동일하도록 최대한 동일한 길이로 설계 및 제작 하였고, Fig. 3에서 측정된 이득 편차는 0.1 dB 이하이고 최대 위상값 차는 1도 이하임을 확인할 수 있었다. Table 2에서와 같이 GPS L1 위성신호의 입사각을 모의하기 위해 설계, 제작한 RF 케이블에 대해 Fig. 3에서 측정한 위상값으로 1번 패치 대비 위상지연차 분석을 통해 천장 방향으로 입사 모의가 가능함을 확인할 수 있었다.
Table 2. RF cable length design using phase delay difference for GPS L1 signal incidence angle of azimuth 0 degree and elevation 90 degree.
| Patch antenna number (Relative position to patch 1 [x-axis (mm), y-axis (mm)]) | Estimated phase delay relative to patch 1, Δφ (deg.) | Designed RF cable length (mm) | Measured phase value (deg.) | Measured phase delay relative to patch 1, Δφ (deg.) |
|---|---|---|---|---|
| 1 ([0.0, 0.0]) | 0 | 500 | -135.0 | 0 |
| 2 ([-56.5, -56.5]) | 0 | 500 | -136.0 | +1.0 |
| 3 ([-56.5, +56.5]) | 0 | 500 | -135.0 | 0.0 |
| 4 ([+56.5, +56.5]) | 0 | 500 | -135.0 | 0.0 |
| 5 ([+56.5, -56.5]) | 0 | 500 | -135.0 | 0.0 |
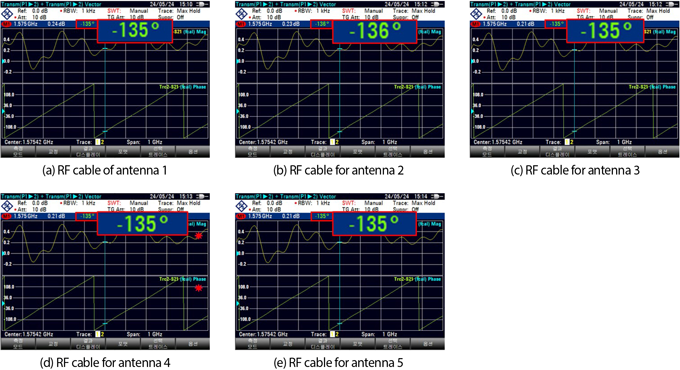
Fig. 3. Measured phase values of RF cables of five antennas for simulated GPS L1 signal.
Fig. 4는 본 논문에서 시험평가를 위해 랩 및 야외시험에서 생존 성능을 일관되게 비교 시험하기 위해 제작된 재밍신호 인가 시험평가용 소프트웨어이다. 재밍신호 인가 시험평가용 소프트웨어는 일관된 시험평가를 위해 시간에 따른 재밍 신호세기 증가율, 최소/최대 신호세기, 각 신호세기별 유지시간 등을 설정하여 재밍신호가 발생되는 벡터 신호발생기를 자동으로 제어하는 기능을 포함하고 있다. 또한 이러한 자동 제어기능을 활용하여 SPIRENT사에서 개발한 위성신호 발생기인 GSS7000과 연동하여 재머의 거리에 따른 재밍신호 세기를 모의하여 인가할 수 있는 기능을 포함하고 있다. 위성신호 발생기와 연동하여 재밍신호를 인가하기 위해서는 재머의 위치에 따른 경로손실을 계산해야 하는데, GPS 신호 대역에 대한 dB 단위를 가지는 자유공간 경로손실 FSL[dB]은 식 (2)를 따르고 있다 (Hilt 2022).
$$FSL^{[dB]} = 92.44 + 20 \log_{10} \left( f^{[GHz]} \right) + 20 \log_{10} \left( d^{[km]} \right)$$
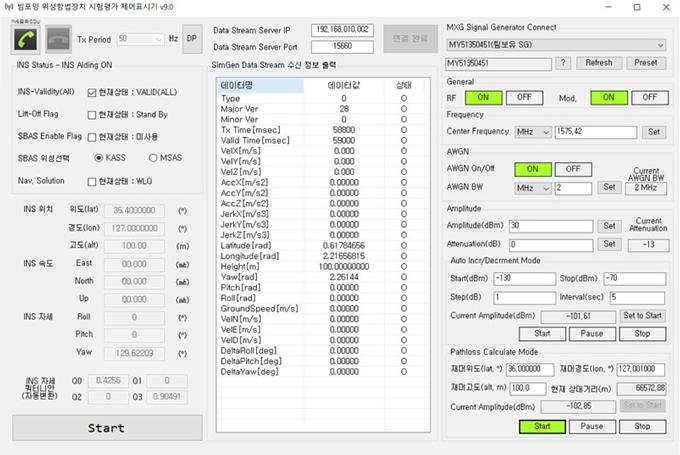
Fig. 4. Jamming signal generator control automation program.
식 (2)에서 92.44 dB의 상수값은 전방위 안테나를 통해 전파를 송신하는 조건에서 GHz 주파수 대역과 km 단위 거리의 자유공간 경로손실의 기본 손실 값이며, $f^{[GHz]}$에는 GPS L1 대역의 GHz 단위의 중심주파수 값인 1.57545 GHz 값을 의미하고, $d^{[km]}$는 플랫폼에 장착된 위성항법장치와 재머간의 km 단위의 거리차를 의미한다. 위성항법장치와 재머간의 거리는 위도, 경도, 고도로 입력되는 재머위치와 실시간 시뮬레이터의 위성위치를 활용하여 연산을 수행한 후 소프트웨어에서 자동으로 입력된다. 우측편파(right hand circular pattern, RHCP) 안테나를 이용하여 송신 및 수신하는 GPS 신호를 처리하는 빔포밍 위성항법장치가 장착된 플랫폼이 재머신호를 수신하는 환경을 가정하는 경우는 지상이 아닌 유도탄 및 비행기와 같은 항공 플랫폼을 가정하는 경우가 많이 때문에 자유공간 경로손실을 포함한 dBm 단위의 수신 신호 $P_{RX}^{[dBm]}$은 식 (3)과 같이 표현할 수 있다.
$$P_{RX}^{[dBm]} = P_{TX}^{[dBm]} + G_{TX}^{[dBiC]} + G_{RX}^{[dBiC]} – FSL^{[dB]}$$
여기서 $P_{TX}^{[dBm]}$은 신호발생기에서 입력하는 입력 신호세기의 dBm 단위의 입력값이 되고, $G_{TX}^{[dBiC]}$ 및 $G_{RX}^{[dBiC]}$는 각각 RHCP 안테나로 송신하는 재머 안테나의 이득와 빔포밍 위성항법장치에 연결된 배열안테나의 평균 이득으로 볼 수 있으나, 본 논문에서는 시뮬레이터를 이용한 동적 시나리오 운용 중의 KASS 신호의 생존성을 시험평가 하기 위한 환경을 모의하기 때문에 두 값 모두 0 dBiC로 설정하였다. 따라서 제안하는 논문의 시험평가 환경에서 사용하는 시험평가용 소프트웨어는 재머의 위치에 따라 재밍 신호세기를 실시간으로 조절하여 시험평가 대상 위성항법장치로 인가하는 기능을 포함하는 것이 특징이다.
Table 3와 같이 빔포밍 기능이 포함된 위성항법장치의 KASS 보정정보의 생존성을 검증하기 위한 랩시험과 야외시험을 포함한 시험평가 조건을 명시하였다. 본 시험평가에서의 종료 조건은 KASS 보정항법을 수행하는 위성항법장치에서 보정정보의 타임아웃이 발생하여 보정항법을 수행하지 않는 시점에 종료한다. 시험평가의 시나리오가 종료되는 시점까지 종료 조건이 발생하지 않으면 KASS 보정항법을 수행하는 위성항법장치의 시험평가가 성공적으로 종료되었다고 판단한다. 이는 운용하는 시나리오 경로 근처에 GPS 재머가 있다는 가정을 하는 경우, 재머에 의해 보정메시지가 수신되지 않더라도 보정항법 수행 중이면 정상 임무수행이 가능한 것으로 가정하였다. 시험평가에서 사용하는 재밍 신호는 시연속 송출되는 재밍신호로 대역폭은 GPS L1 C/A 중심주파수를 중심으로 2 MHz 대역폭을 가지는 AWGN 신호로 인가하여 시험하였다. 랩시험에서는 GPS L1 C/A 신호의 최저 관측 수신 신호세기 (GPS Navstar 1995)의 -130 dBm이 위성항법장치 RF 포트에 입력될 수 있도록 교정 후 인가하여 주었다. 야외시험에서는 의도하지 않은 재밍신호의 방사를 제한하고 의도한 재밍 입사 방향을 모의할 수 있도록 설계한 RF 케이블과 2포트 컴바이너를 통해 위성신호도 인가되기 때문에, 실제 위성항법장치 RF 포트에 입력되는 위성신호는 안테나에서 수신되는 위성신호 보다 낮게 수신되며 감쇄된 위성신호 세기를 교정한 재밍신호 세기를 인가하여 시험을 수행하였다. 동적환경의 랩시험에서는 플랫폼의 이동환경을 고려하여야 하며, 이를 위해 본 논문에서 플랫폼의 이동속도는 임무수행 차량 최대 이동속도를 고려한 180 km/h인 50 m/sec로 설정하고 이동방향은 재머로부터 경도 방향 약 100 m 이격된 위치를 지나가는 이동경로를 설정하여 시험평가를 수행하였다.
Table 3. Test evaluation condition for survivability of KASS augmented navigation.
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Jamming signal azimuth | 90 deg | Jamming power inc. step | 1 dB |
| Jamming signal elevation | 0 deg | Jamming power inc. interval | 5 sec |
| Min. jamming power | -130 dBm | Max. Jam. power hold time | 480 sec |
| Max. jamming power | -70 dBm | Jam. Tx. power at moing Scn. | 30 dBm |
| Platform moving velocity | 50 m/sec | Platform moving toward | Jammer out of dist. 100 m |
Fig. 5는 위성항법장치를 장착한 플랫폼이 정지되어 있는 환경을 고려한 정적환경과 플랫폼이 재밍환경으로 이동하는 운용 환경을 고려한 동적환경의 랩시험 시험구성도와 실제 시험구성 예시를 보여주고 있다. Fig. 6은 위성항법장치를 장착한 플랫폼이 정지된 정적환경의 야외 시험구성도와 실제 시험구성 예시를 보여주고 있다. Figs. 5와 6의 시험 구성도로 3.1절에서는 정적환경 조건에서의 랩시험 검증시험 결과를 제시하였고, 3.2절에서는 정적환경 조건에서의 야외시험 검증시험 결과를 제시하였다. 3.3절에서는 Fig. 5의 시험구성도로 동적환경 모의 조건에서의 랩시험 검증시험 결과를 제시하였다.
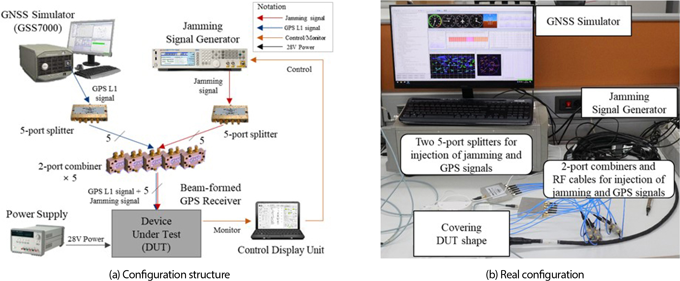
Fig. 5. Proposed lab test configuration for survivability of KASS augmented navigation.
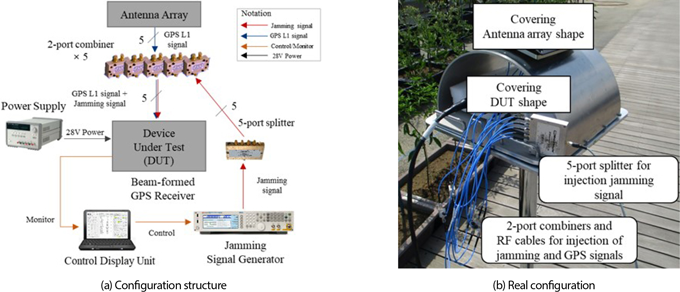
Fig. 6. Proposed live test configuration for survivability of KASS augmented navigation.
Figs. 7에서 9의 시험결과에서는 재밍 신호세기, KASS 위성신호의 carrier-to-noise (CNR), GPS L1 기준 3D fix 항법결과, 보정항법 상태, KASS 프레임락 상태를 포함하는 5개의 파라미터를 통해 시험결과를 분석하였다. 녹색선으로 표시하고 있는 재밍 신호세기는 Jamming-to-Signal ratio (J/S)로 표현하며, 이는 수신한 재밍신호세기에서 GPS L1 수신신호세기를 차분한 값으로 dB 단위로 표현하며, 다른 파라미터와의 동시 표현을 위해 dB 단위의 값에서 10을 나누어 표시하였다. Figs. 7에서 9의 결과에서 y축의 값이 6으로 표시되면 J/S 60 dB로 위성신호 대비 60 dB 신호세기가 센 재머가 인가되는 조건을 의미한다. 마젠타 색으로 표시하는 KASS 위성신호의 CNR은 dB 단위로 표시하며, 다른 파라미터와의 동시 표현을 위해 dB 단위의 값에서 10을 나누어 표시하였다. Figs. 7에서 9의 결과에서 y축의 값이 4로 표시되면, KASS 위성신호의 수신 신호세기인 CNR 값이 40.0 dB 임을 의미한다. Figs. 7에서 9의 결과에서 빨간색으로 표시하는 GPS L1 기준 3D fix 항법결과는 3D fix인 경우 y축에 2의 값을 No fix인 경우 0의 값을 출력한다. Figs. 7에서 9의 결과에서 검정색 점선으로 표시하는 보정항법 상태는 본 논문의 시험평가 대상인 위성항법장치에서 KASS 위성신호를 이용하여 보정항법을 수행 하는 경우, y축에 2의 값을 표시하고 그렇지 않은 경우 0을 표시한다. Figs. 7에서 9의 결과에서 파란색선으로 표시하는 KASS 프레임락 상태는 KASS 위성신호에 대해 프레임락이 걸린 경우 1로 표시하고 그렇지 않은 경우 0으로 표시하며 프레임락이 걸리지 않으면 SBAS 보정정보를 파싱하지 못하는 상태를 의미한다.
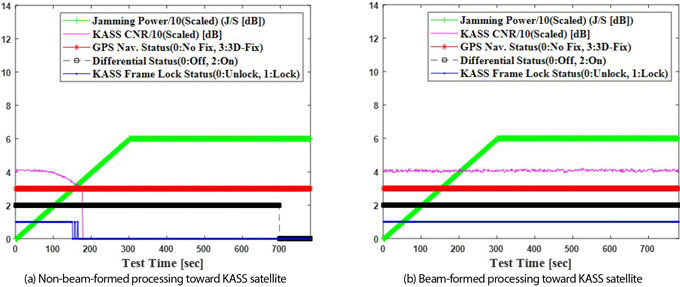
Fig. 7. Static lab test result of KASS augmented navigation persistent time.
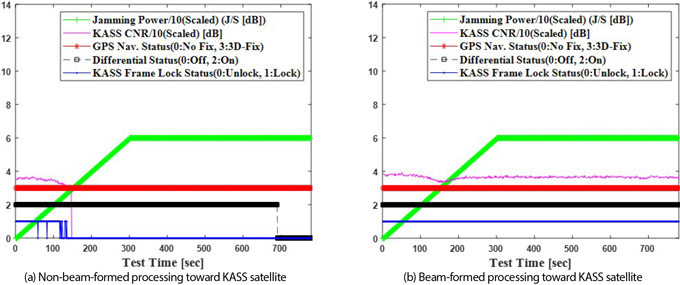
Fig. 8. Static live test result of KASS augmented navigation persistent time.
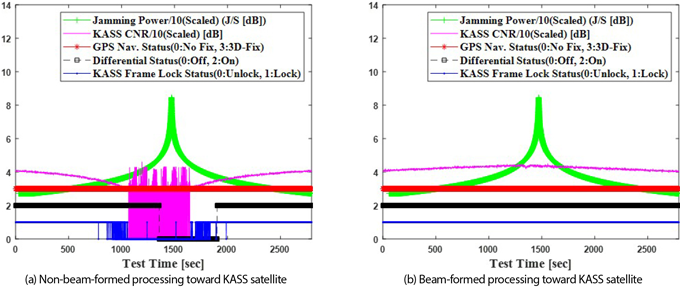
Fig. 9. Dynamic lab test result of KASS augmented navigation persistent time.
Fig. 7은 플랫폼이 정지한 조건을 고려한 정적환경 랩시험에서 KASS 보정방법의 생존성을 평가하기 위한 재밍신호 세기 증가에 따른 보정방법 수행 시험결과를 보여주고 있다. KASS 보정방법의 생존성을 평가하기 위한 위성항법장치 보정정보 타임아웃 시간은 모두 동일하며, 비교를 위한 KASS 위성신호에 대해 빔포밍 신호처리를 하지 않은 위성항법장치 시험결과는 Fig. 7a의 결과에, 빔포밍 신호처리를 한 위성항법장치의 시험결과는 Fig. 7b의 결과에 도시하였다. Fig. 7의 재밍 신호세기를 의미하는 녹색선을 통해 확인할 수 있듯이, Table 3의 시험평가 조건과 동일하게 재밍신호세기는 5초에 1 dB씩 증가함을 확인할 수 있다. Fig. 7a에서는 재밍신호세기 증가와 함께 파란색으로 표시하고 있는 KASS 위성신호의 프레임락이 0으로 떨어져 SBAS 보정정보를 파싱하지 못한 상태에서, 검정색으로 표시하는 보정항법 상태 결과를 통해 시험 시작 후 698초에 보정항법 상태를 유지하지 못하고 GPS L1 단독 항법으로 전환되었음을 알 수 있다. KASS 위성신호의 프레임락이 풀린 이후 600초보다 짧은 시점에서 타임아웃이 발생한 이유는 2장에서 언급한 내용과 같이, 시험평가 대상인 위성항법장치에서는 다종의 보정메시지 중 26번인 전리층 보정메시지에 우선 순위를 두어 26번 타임아웃 주기를 KASS 보정항법의 타임아웃으로 설정하였고 시험 시작 후 26번 메시지를 98초에 최종 수신하였기 때문에 698초에서 타임아웃이 발생하여 보정항법이 종료된 것으로 분석하였다. Fig. 7a에서 재밍신호세기가 증가함에도 GPS 항법 상태를 3D Fix로 유지할 수 있는 이유는 KASS 신호에 대해서는 비교를 위해 빔포밍 신호처리를 수행하지 않지만, GPS L1 위성신호에 대해서는 빔포밍 신호처리를 수행하여 재밍신호를 잘 제거하였기 때문으로 분석된다. Fig. 7b에서는 녹색선의 재밍 신호가 최대 J/S 60 dB의 신호 세기로 인가되는 조건에서 KASS 위성신호에 대해서 빔포밍 신호처리를 수행하여 재밍신호를 효과적으로 제거함으로써, 검정색으로 표시하고 있는 보정항법 정상 결과를 시험평가 시나리오가 종료되는 시점까지 성공적으로 유지함을 확인할 수 있었다.
Fig. 8에서는 플랫폼이 정지된 조건의 정적 야외시험에서 KASS 보정항법의 생존성을 평가하기 위한 재밍신호 세기 증가에 따른 보정항법 수행 검증결과를 보여주고 있다. 앞선 3.1절의 정적환경 랩시험에서의 시뮬레이터 대신 야외시험에서는 배열안테나를 활용함으로써 실제 위성항법장치가 운용되는 유사 환경에서 반복 성능 검증을 위한 야외시험 방안을 제시하였다. 정적환경 야외시험에서도 위성항법장치의 KASS 보정정보 타임아웃 시간은 두 비교시험 모두 동일하며, 비교를 위한 KASS 위성신호에 대해 빔포밍 신호처리를 하지 않은 위성항법장치 시험결과를 Fig. 8a의 결과에, 빔포밍 신호처리를 한 위성항법장치의 시험결과를 Fig. 8b의 결과에 도시하였다. Fig. 8a에서도 녹색선의 재밍 신호세기 증가와 함께 파란색선의 KASS 위성신호의 프레임락이 풀린 이후, 검정색 점선으로 표시하고 있는 보정항법 결과가 타임아웃으로 인해 691초에 보정항법을 유지하지 못하는 것을 확인할 수 있었다. 랩시험의 Fig. 7a에서의 시험 결과 보다 야외시험인 Fig. 8a의 시험 결과에서 상대적으로 빨리 파란색으로 표시하고 있는 KASS 위성신호의 프레임락을 놓치는 것을 확인할 수 있는데, 이는 배열안테나와 전자부가 연결하는 케이블 사이에 재밍신호를 인가하기 위한 2포트 컴바이너와 RF 케이블을 사용함으로써 실제 랩시험에서 인가한 KASS 위성신호 세기 보다 야외의 KASS 위성신호가 낮은 신호세기로 위성항법장치의 RF 포트로 인가되기 때문이다. 야외시험 역시 파란색으로 표시하는 KASS 위성신호의 프레임락을 놓친 이후 검정색으로 표시하고 있는 보정항법 결과에서 600초보다 빨리 보정항법이 미수행된 이유로는, 26번 전리층 보정메시지 최종 수신이 91초까지 되고 600초 이후 보정항법의 타임아웃이 발생하였음을 3.1절의 분석을 통해 확인할 수 있었다. Fig. 8b에서도 녹색선의 재밍 신호가 최대 J/S 60 dB의 신호 세기로 인가되는 조건에서 KASS 위성신호에 대해서 빔포밍 신호처리를 수행하여 재밍신호를 효과적으로 제거함으로써, 검정색 점선으로 표시하는 보정항법 정상 결과를 시험평가 시나리오가 종료되는 시점까지 성공적으로 유지함을 확인할 수 있었다.
Fig. 9에서는 플랫폼이 재머로부터 약 100 m 이격된 위치를 지나가는 운용 환경을 고려한 동적환경 랩시험에서 KASS 보정항법의 생존성을 평가하기 위한 재밍신호세기에 따른 보정항법 수행 시험결과를 보여주고 있다. 앞선 3.1절의 정적환경 랩시험에서 재머의 위치는 시험평가를 위해 제작한 재밍신호 인가 시험평가용 소프트웨어에서 입력받도록 하고, 시뮬레이터 시나리오의 이동경로와 속도는 Table 3의 시험평가 조건을 따르도록 시나리오를 설정하였다. 동적환경 랩시험에서도 위성항법장치의 KASS 보정정보 타임아웃 시간은 동일하며, 비교를 위해 KASS 위성신호에 대해 빔포밍 신호처리를 하지 않은 위성항법장치 시험결과를 Fig. 9a의 결과에, 빔포밍 신호처리를 한 위성항법장치의 시험결과를 Fig. 9b의 결과에 도시하였다. Fig. 9에서는 시간의 흐름에 따라 재머와의 거리가 가까워지며 녹색선으로 표시하고 있는 재밍 신호세기가 quadratic하게 증가하였다가, 다시 재머로부터 멀어지며 quadratic의 역방향으로 감소하는 것을 볼 수 있는데, 이는 재머 위치에 따른 자유경로손실 계산값이 거리의 제곱에 따른 함수의 형태로 표현되기 때문에 발생하는 현상이다. Fig. 9a에서도 녹색선의 재밍 신호세기 증가와 함께 파란색으로 표시하고 있는 KASS 위성신호의 프레임락을 놓친 이후, 검정색 점선의 결과를 통해 1356초에 보정항법을 수행하지 못하고, 재머와의 거리가 멀어짐에 따라 녹색선의 재밍 신호세기의 감쇄로 인해 1903초에 다시 보정항법으로 복귀하는 것을 확인할 수 있었다. Fig. 9a에서 다른 시험보다 프레임락을 잡고 놓치는 현상이 많이 발생하는 것은 이동속도 50 m/sec로 인해 재머로부터 위성항법장치의 거리가 먼 경우 재밍 신호세기가 1 dB 스케일보다도 더 낮게 증가하고 감쇄하기 때문에 위성항법장치에서 KASS 프레임락 성공과 실패가 빈번하게 발생함을 확인할 수 있었다. Fig. 9b에서는 KASS 위성신호에 대한 빔포밍 신호처리로 인해 동적으로 이동하는 환경에서도 KASS 위성신호에 대한 빔포밍 신호처리를 수행하여 녹색선으로 표시하는 재밍 신호세기의 재밍신호를 효과적으로 제거함으로써 검정색 점선으로 표시하는 KASS 보정항법을 시험평가 시나리오가 종료되는 시점까지 성공적으로 유지함을 확인할 수 있었다.
본 논문에서 제안한 시험평가 방안을 통해 위성항법장치에서 KASS 위성에 대해 빔포밍 신호처리 기법을 적용하였을 때 동일한 타임아웃 제한값을 걸더라도 보다 오랜시간 동안 보정된 항법해를 출력할 수 있음을 검증할 수 있었다. 실제 운용조건을 고려하여 본 논문에서 제안하고 있는 빔포밍 위성항법장치의 생존성을 판단하기 위한 시험평가 방안을 바탕으로 플랫폼의 이동속도 및 이동방향에 따른 재밍 신호세기 증가율과 최대 재밍 신호세기를 고려하여 설정한 시험결과를 통해 실제 운용환경과 유사한 환경에서도 시험평가 대상 장비의 생존성을 분석할 수 있었다.
또한 향후 신뢰성/무결성을 우선으로 검토를 할 수밖에 없는 민간 항공 분야 및 타 분야에서는 위성항법장치 내 KASS 신호에 대한 우선순위를 조정한 위성항법장치 또는 GPS 수신기에 대한 시험평가를 수행해야 할 때에도 본 논문에서 제안한 시험평가 방안을 고려하여 접근한다면 정량적인 시험평가 수행이 가능할 것으로 판단된다.
Conceptualization, J. Jung, H. Won, W. Ahn, and S.W. Yun; methodology, J. Jung, W. Ahn, and S.W. Yun; software, J. Jung, H. Won, K.W. Park, and B. Jo; validation, H. Won, D. Park, S. Kang, and J. Go; formal analysis, J. Jung, H. Won, K.W. Park, and B. Jo; investigation, J. Jung, H. Won, and S. Kwon; resources, J. Jung and S. Kwon; data curation, H. Won, D. Park, S. Kang, and J. Go; writing-original draft preparation, J. Jung, H. Won, S. Kang, and J. Go; writing-review and editing, H. Won, D. Park, and S. Kwon; visualization, J. Jung, H. Won, S. Kang, and J. Go; supervision, W. Ahn and S.W. Yun; project administration, W. Ahn and S.W. Yun; funding acquisition, W. Ahn and S.W. Yun.
The authors declare no conflict of interest.
GPS Navstar 1995, Global Positioning System standard positioning service signal specification, Report, 2nd edition, p.14.
Han, D.-H., Yoon, H., & Kee, C.-D. 2011, A Study on Message Scheduling Algorithm for Wide Area Differential GNSS Considering International Standard, JANT, 15, 517-522. https://doi.org/10.12673/jant.2011.15.4.517
Hilt, A. 2022, Throughput Estimation of K-zone Gbps Radio Links Operating in the E-band, Journal of Microelectronics, Electronic Components and Materials, 52, 29-39. https://doi.org/10.33180/InfMIDEM2022.104
Jung, J., Won, H., Park, S., Kang, H., Kwon, S., et al. 2023, A Spoofing Detection Scheme Based on Elevation Masked-Relative Received Power in GPS Receivers using Multi-band Array Antenna, JPNT, 12, 101-112. https://doi.org/10.11003/JPNT.2023.12.2.101
Lee, K., Song, M. K., & Lee, J. Y. 2022, Performance Analysis of the Anti-Spoofing Array Antenna with Eigenvector Nulling Algorithm, JPNT, 11, 181-189. https://doi.org/10.11003/JPNT.2022.11.3.181
Park, K.W., Park, J.-I., & Park, C. 2020, Efficient Methods of Utilizing Multi-SBAS Corrections in Multi-GNSS Positioning, Sensors, 20, 1-16. https://doi.org/10.3390/s20010256
Park, S.-H., Park, Y.-H., Jeong, J.-H., Park, J.-M. 2023, Accuracy Evaluation of KASS Augmented Navigation by Utilizing Commercial Receivers, JPNT, 12, 349-358. https://doi.org/10.11003/JPNT.2023.12.4.349
RTCA SC-159, 2016, Minimum Operational Performance Standards for Global Positioning System/Satellite-Based Augmentation System Airborne Equipment, DO-229E.
Song, J., Liu, T., Chen, X., & Wu, Z. 2024, Satellite Navigation Message Authentication in GNSS: Research on Message Scheduler for SBAS L1, Sensors, 24, 1-22. https://doi.org/10.3390/s24020360
Walter, T., Neish, A., & Blanch, J. 2020, A Rigid Message Scheduler for SBAS, IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20-23 April 2020, pp.452-460. https://doi.org/10.1109/PLANS46316.2020.9109849
Yun, Y., Lee, E., Heo, M.-B., & Nam, G.-W. 2016, KASS Message Scheduler Design, JPNT, 5, 193-202. https://doi.org/10.11003/JPNT.2016.5.4.193