Beomju Shin1†![]() , Taikjin Lee2,3
, Taikjin Lee2,3![]()
1Division of Software, Hallym University, Chuncheon, Gangwon-do 24252, South Korea
2Augmented Safety System with Intelligence Sensing & Tracking, Korea Institute of Science and Technology, Seoul 02972, South Korea
3TJ LABS, 7F, 175, Yeoksam-ro, Gangnam-gu, Seoul 06247, South Korea
†Corresponding Author: Beomju Shin, E-mail: bjshin@hallym.ac.kr
Citation: Shin, B., & Lee, T., 2024, Analysis of Localization Technology Performance Based on Accumulated RSSI Signal Using Simulation, Journal of Positioning, Navigation, and Timing, 13, 331-339.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2024 September, Volume 13, Issue 3, pages 331-339. https://doi.org/10.11003/JPNT.2024.13.3.331
Received on Jun 14, 2024, Revised on Jul 08, 2024, Accepted on Jul 26, 2024, Published on 15 Sep 15, 2024.
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Reliable and precise indoor localization is crucial for personal navigation, emergency rescue, and monitoring workers indoors. To use this technology in different applications, it is important to make it less dependent on infrastructure and to keep the error as small as possible. Fingerprinting stands out as a popular choice for indoor positioning because it leverages existing infrastructure and works with just a smartphone. However, its accuracy heavily relies on the quality of that infrastructure. For instance, having too few access points or beacons can greatly reduce its effectiveness. To reduce dependence on RF infrastructure, we have developed surface correlation (SC) using accumulated Received Signal Strength Indicator (RSSI) signals This approach constructs a user mask for radio map comparisons using an accumulated RSSI vector and the trajectory of the user, which is estimated through PDR. The location with the highest correlation is considered as the user’s position after comparison. Through a simulation, the performance of short RSSI vector-based technology and SC is analyzed, and future directions for the development of SC are discussed.
indoor localization, RSSI, PDR, surface correlation, smartphone
개인 스마트폰의 보급이 확산되면서 다양한 서비스가 등장하게 되었다. 특히 스마트폰의 위치 정보는 새로운 유형의 서비스를 만들어내고 사용자의 삶의 질을 향상시키는 요인이 되었다. 스마트폰 사용자는 Global Navigation Satellite System (GNSS)를 사용하여 실외에서 실시간 위치를 파악할 수 있다. 그러나 GNSS 신호를 받지 못하는 실내 환경에서는 사용자의 위치를 추정하기 위한 다른 대안이 필요하다.
실내에서 사용자의 위치를 추정하기 위해서는 다양한 기반 설비가 필요하다 (He & Chan 2016). Fingerprinting 기술은 이미 설치되어 있는 Wi-Fi Access Point (AP), LTE 기지국 신호를 이용할수 있기 때문에 다양한 연구자들이 활발하게 연구를 진행하고 있다 (Bahl & Padmanabhan 2000). Fingerprinting 기술은 사용자가 수신한 Received Signal Strength Indicator (RSSI) 벡터를 radio map과 비교하여 현재 위치를 찾는다. 따라서 위치 추정을 위한 radio map 구축이 선행되어야 한다. Radio map은 일정간격으로 정의된 Reference Point (RP)에서 인접 AP 또는 비컨의 RSSI 신호를 수신하여 저장해 놓고, 위치 추정 단계에서 사용자의 RSSI 벡터를 이전에 저장된 radio map의 RSSI 벡터와 비교한다. 최종적으로 현재 사용자의 RSSI 벡터와 가장 유사한 패턴을 가진 RP의 위치가 사용자 위치로 간주된다.
Fingerprinting 기술의 약점은 추정된 위치가 기반 설비 및 실내 환경에 크게 영향을 받는다는 것이다 (Li et al. 2019). 예를 들어, 테스트 베드에 소수의 AP만 설치된 경우, 높은 위치 정확도를 기대하기 어렵다. 유동인구가 많은 곳이나 복잡한 실내 환경에서는 RSSI의 다중경로 오차로 인해 위치 오차가 증가할 수 있다. 또한 AP와 사용자 사이의 거리가 멀 경우 신호 변별력이 떨어져 위치 계산에 도움이 되지 않을 가능성도 있다. 강한 RSSI 신호가 다수 수신되는 경우 사용자의 위치가 정확하게 추정될 가능성이 높지만, 현실적으로 이는 쉽지 않다. 위의 현실 상황을 보완하기 위해서는 AP나 비콘의 기반 설비 숫자를 늘려야 하지만, 이는 관리 비용의 증가로 이어지기 때문에 다른 대안이 필요하다.
RSSI 측정치의 한계를 극복하기 위한 대안으로 Pedestrian Dead Reckoning (PDR)과 RSSI 벡터를 Factor Graph Framework로 결합하는 연구가 진행되었으며, 이를 통해 RSSI 측정치를 단독으로 사용하는 것보다 더 안정적인 측위 결과를 도출할 수 있었다 (Guo et al. 2023). 하지만 다양한 실제 상황에서 스마트폰 기반의 PDR 성능을 유지하기 어렵다는 점과 측위 시스템 자체가 복잡해지는 점은 여전히 해결해야 할 문제로 남아 있다. 또한, 머신러닝과 딥러닝 등의 기술을 fingerprinting에 적용하는 연구도 활발히 진행되고 있다 (Singh et al. 2021). 그러나 이러한 방법들도 학습 데이터의 양과 품질에 의존적이며, 실내에서 RSSI 벡터의 품질이 낮은 문제에 대한 근본적인 해결책은 되지 못한다.
기존의 단일 RSSI 벡터를 이용한 fingerprinting 방식과는 달리, Shen et al. (2013)에서 보행자가 이동 중에 수집한 RSSI 벡터 시퀀스를 활용하여 위치를 추정하는 새로운 방법을 제안하였다. RSSI 값은 거리의 제곱에 반비례하며, RSSI 신호를 누적하여 RSSI shape를 위치 추정에 활용하면 단일 RSSI 벡터만을 사용하는 경우보다 더욱 안정적인 위치 추정이 가능하다. 그러나 단순히 RSSI를 누적하는 방식은 보행자가 정지한 경우나 다양한 경로로 이동하는 상황에 효과적으로 대응하기 어려워 실제 상황에서의 적용에는 한계가 있다. 이를 보완하기 위해 실제 사용자가 움직이면 발생한 궤적과 RSSI 벡터 시퀀스를 함께 활용한 새로운 방법이 제안되었다 (Shin et al. 2023). 사용자의 움직인 궤적은 PDR로 추정을 하며, 각 걸음에서 가장 가까운 시간에 수신된 RSSI 벡터를 매칭하여 RSSI의 공간 패턴을 생성한다. 이 방법은 이동 경로에 따른 RSSI 벡터의 변화를 고려함으로써 보다 정밀하고 실제적인 위치 추정을 가능하게 한다. 해당 연구에서는 제한된 테스트베드와 측정치로만 분석을 진행했기 때문에 제안한 방법에 대한 다각도의 분석이 부족했다. 본 논문에서는 시뮬레이션을 통해 설치된 비콘의 수, 위치 및 PDR 궤적의 오차 수준을 다르게 한 상황에서 제안한 방법의 성능을 분석한다. 이를 통해 다양한 실험 환경에 따른 제안 방법의 성능 변화를 분석한다. 또한, 항법에 사용하는 RSSI 신호의 길이에 따른 성능도 분석함으로써 RSSI 신호 시퀀스와 항법 결과의 관계를 분석한다. 추가적으로 RSSI 벡터 시퀀스를 활용한 제안 방법의 발전 가능성과 보완해야 할 사항들에 대해 논의한다.
본 논문은 다음과 같이 구성되었다. 2장에서는 기존의 fingerprinting 방법과 본 연구에서 제안하는 시퀀스 기반의 새로운 지문인식 방법에 대해 설명한다. 3장에서는 시뮬레이션 환경 설정 및 실시한 테스트 결과를 분석하여 제안 방법의 유효성을 검토하고 향후 연구 방향 및 제안 방법의 개선 사항에 대해 논한다. 마지막으로 4장은 결론이다.
다수의 논문에서 fingerprinting 방법에 대해 상세히 다루고 있어, 본 논문에서는 이를 간략하게만 소개하고자 한다. Fig. 1은 일반적인 fingerprinting 방법의 과정을 설명하고 있다. fingerprinting 시스템을 구현하기 위해서는 먼저 radio map이 생성되어야 한다. Radio map은 여러 개의 RP들로 구성되며, 각 RP는 2차원 좌표와 RSSI 벡터를 가지고 있다. 위치 추정 단계에서는 현재 수신된 RSSI 벡터와 radio map에 저장된 RSSI 벡터들을 비교하여 가장 유사한 패턴을 가진 RP를 현재 위치로 추정한다.
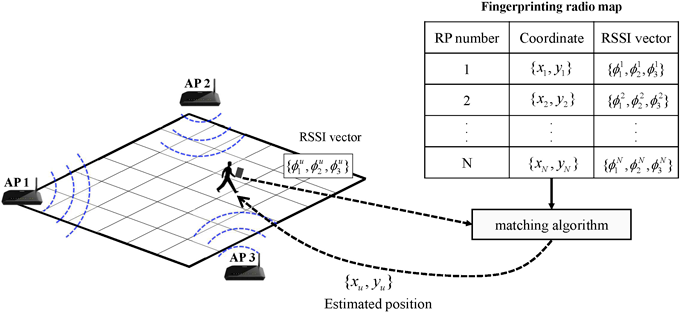
Fig. 1. Overall process of fingerprinting method.
Fingerprinting 시스템의 핵심은 matching algorithm이다. 주요 fingerprinting 방법은 결정론적 알고리즘과 확률론적 알고리즘으로 나뉜다. 결정론적 알고리즘은 현재 사용자 데이터와 radio map을 다양한 유사도 메트릭을 통해 비교하여, 두 벡터 간의 차이가 작은 RP를 현재 사용자의 위치로 여긴다. 가장 쉽고 널리 사용되는 방법으로는 Nearest Neighbor, K-Nearest Neighbor (KNN), Weighted K-Nearest Neighbor 등이 있다 (Shang & Wang 2022). 또한, K의 RP 선택을 적응적으로 조정함으로써 위치 정확도를 개선하는 연구도 진행된바있다. 다른 접근 방식으로는 support vector machine 등의 머신러닝 기법을 적용하는 것인데, 이는 많은 계산량을 요구하지만 KNN보다 더 정확한 위치 추정 결과를 보여준다 (Brunato & Battiti 2005). 확률론적 알고리즘은 주변 AP의 RSSI 확률 분포를 사용하여 사용자 위치와 RP 사이의 가능성을 계산하며, naïve bayes classifier 등이 활용된다. 또한 deep neural network이나 convolutional neural network 등의 인공지능 방법을 적용한 fingerprinting 방법도 활발이 연구가 진행되고 있다 (Jang & Hong 2018).
본 연구에서 제안하는 방법의 주요 특징은 사용자의 위치를 결정하는데 단일 RSSI 벡터 대신 여러 개의 RSSI 벡터를 활용한다는 점이다. 이 방법을 Surface Correlation (SC)이라 명명하였는데, 이는 누적된 RSSI 벡터를 이용하여 공간 내 RSSI 벡터의 분포를 surface로 나타내고, 이를 radio map과 비교하기 때문이다 (Lee et al. 2019). 또한, 사용자 경로와 누적된 RSSI 벡터를 결합하여 생성된 사용자 데이터를 User RSSI Surface (URS)라고 부르며, URS와 radio map 간의 비교를 통해 correlation value가 가장 높은 RP를 사용자의 위치를 추정한다.
Fig. 2는 누적된 신호를 사용하여 위치를 추정하는 이점을 보여준다. 첫 번째 및 두 번째 사용자가 과거 신호 데이터를 저장한다고 가정하자. 첫 번째 사용자의 RSSI 시퀀스는 두 번째 사용자의 것보다 짧다. 첫 번째 사용자의 현재 수신된 RSSI는 미약신호이기 때문에 신호분별력이 떨어진다. 실내에서 RSSI는 매우 noisy한 것을 고려해볼 때, 매우 짧거나 단발적인 RSSI만 사용될 경우 안정적인 위치 결과를 기대하기 어려울 것이다. 두번째 사용자 역시 현재 수신되는 RSSI 값은 미약하다. 하지만 이동하면서 저장했던 강한 RSSI 신호를 가지고 있다. 위치 추정 단계에서 RSSI sequence 모두를 이용하기 때문에 현재 사용자의 RSSI 패턴이 radio map 어디에 매핑 될지가 분명하게 보인다. 제안된 방법은 큰 이미지 내에서 작은 이미지의 위치를 결정하는 것과 개념적으로 유사하다. Fig. 3에서 왼쪽의 작은 이미지는 URS를 나타내며, 오른쪽의 큰 이미지는 radio map을 나타낸다. SC는 사용자의 PDR과 RSSI 벡터 시퀀스를 입력으로 하여 사용자 데이터와 radio map을 비교함으로써 사용자 위치를 추정한다. 이미지가 한 픽셀에 대해 RGB 정보를 포함하는 것처럼, radio map은 RSSI 값들을 포함한다. 기존 fingerprinting 기술은 사용자 위치를 추정하기 위해 단일 픽셀만을 사용하는 것으로 가정한다면 제안된 방법에서는 여러 개의 픽셀을 이용하는 것이다.
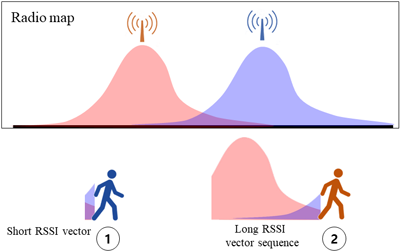
Fig. 2. Comparison of short and long RSSI vector sequences.
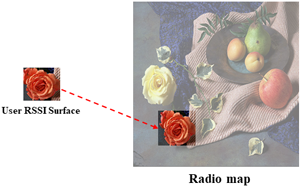
Fig. 3. Explanation of the SC concept using an image. SC is similar to f inding the location where a small image matches within a larger image.
Fig. 4는 기존 fingerprinting 방법과 SC 방법의 radio map을 각각 보여준다. 기존 fingerprinting 방법은 radio map을 단순한 표 형태로 생성하기 때문에, RP들이 물리적으로 인접해 있더라도 해당 정보는 위치 추정에 사용되지 않는다. 그러나 제안된 radio map은 RSSI 분포를 2차원 공간으로 표현한다. 즉, 특정 비콘에 대한 radio map이 행렬로 표현되며, 행렬의 각 요소는 RP가 되며, 행렬의 인덱스가 RP 좌표로 사용된다. 만약 BLE 비콘 신호를 radio map으로 사용한다면, 각 BLE ID에 마다 행렬 형태의 radio map이 생성된다. Fig. 4b는 모든 BLE ID에 대한 RSSI 분포를 보여준다.
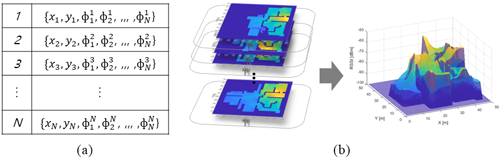
Fig. 4. Comparison of traditional fingerprinting radio map and SC radio map. (a) Tabular form of radio map, (b) Proposed radio map for SC.
하나의 BLE ID에 대한 radio map은 Eq. (1)과 같이 표현할 수 있다.
$$\Phi^{R}_{k} = \begin{bmatrix}
\phi^{R}_{1,1,k} & \phi^{R}_{1,2,k} & \cdots & \phi^{R}_{1,N,k} \\
\phi^{R}_{2,1,k} & \phi^{R}_{2,2,k} & \cdots & \phi^{R}_{2,N,k} \\
\vdots & \vdots & \ddots & \vdots \\
\phi^{R}_{M,1,k} & \phi^{R}_{M,2,k} & \cdots & \phi^{R}_{M,N,k}
\end{bmatrix}$$
여기서 $\phi^{R}_{m,n,k}$는 radio map의 {m, n} 위치에 있는 RP에 저장된 k번째 비콘의 RSSI 값이다. 실내 공간의 크기와 radio map의 물리적 크기가 동일하게 정의되어 있기 때문에, RP의 간격이 1 m라면 테스트베드의 크기는 M × N m2이다. 모든 비콘에 대해서 위와 같이 정의된다.
제안된 기술의 핵심은 사용자의 누적된 RSSI 패턴을 2차원 공간에서 정확하게 생성하는 것이다. 만약 SC 기술을 보행자에 적용할 경우, 보행자의 궤적은 PDR을 통해 추정한다. PDR을 통해 사용자의 걸음이 감지되면, 시간, 걸음 수, 걸음 길이, 방향 등의 추정 결과가 저장된다. RSSI 벡터는 일정 간격으로 저장될 텐데, PDR 결과가 저장되는 주기와 RSSI 벡터가 저장되는 주기가 다르다. URS를 만들 때는 보행자의 걸음을 기준으로 가장 가까운 시간에 저장된 RSSI 벡터를 가져와 매칭한다. Fig. 5는 PDR 결과와 RSSI 벡터를 이용해서 각 스텝에서 RSSI 벡터를 매칭하는 과정을 보여준다.
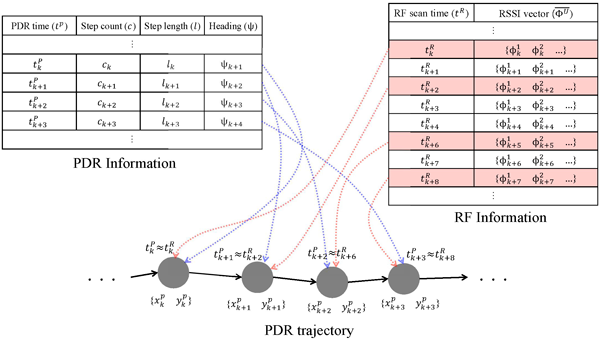
Fig. 5. Integration of PDR and RSSI vector sequence.
또한 Fig. 6은 PDR과 RSSI 벡터가 매칭된 경로를 최종적으로 URS로 변경하는 과정을 보여준다. Fig. 6a에서는 총 24걸음이 발생하였다고 가정하자. URS와 radio map 간의 효율적인 비교를 위해, 궤적을 radio map과 동일한 해상도로 변환하는 것이 필요하다. 만약 radio map의 RP가 1 m 간격으로 정의되어 있다면, URS도 1 m 간격으로 생성되어야 효율적인 비교가 가능하다. Fig. 6b는 보행자 궤적이 1 m 단위 픽셀과 겹쳐지는 것을 보여준다. 보행자의 궤적이 1 m 단위로 변경되면, Fig. 6c와 같이 된다. 마지막으로, URS는 해당 걸음이 발생한 시간에 가장 가까운 시간에 스캔된 RSSI 벡터와 매칭하여 생성된다. 마지막으로, 각 BLE ID에 대해 생성된 radio map과 URS를 비교하여 사용자의 위치를 추정한다. Fig. 6d에서 보여지는 URS는 Eq. (2)와 같이 정의된다.
$$\Phi^{U}_{k} = \begin{bmatrix}
\phi^{U}_{1,1,k} & \phi^{U}_{1,2,k} & \cdots & \phi^{U}_{1,J,k} \\
\phi^{U}_{2,1,k} & \phi^{U}_{2,2,k} & \cdots & \phi^{U}_{2,J,k} \\
\vdots & \vdots & \ddots & \vdots \\
\phi^{U}_{I,1,k} & \phi^{U}_{I,2,k} & \cdots & \phi^{U}_{I,J,k}
\end{bmatrix}$$
여기서 $\phi^{U}_{i,j,k}$는 URS 내 위치 {i, j}에서 k번째 비콘의 RSSI 값을 나타낸다. I와 J는 각각 URS의 행과 열 크기를 나타낸다. URS의 크기는 PDR 궤적에 기반하여 결정되었다.
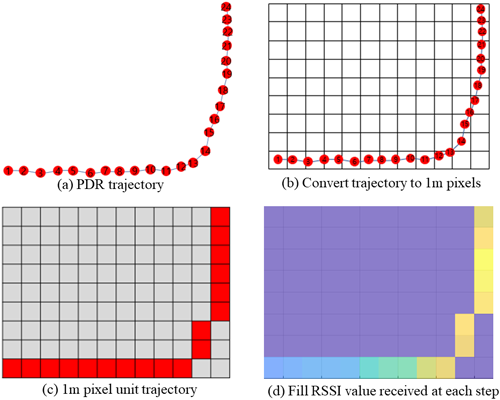
Fig. 6. User RSSI surface creation process.
이제 최종적으로 Fig. 7과 같이 URS와 radio map을 비교하여 사용자의 위치를 찾는다. Eq. (3)은 radio map과 URS 간의 RSSI 차이 값을 계산하는 식인데, 특히 radio map의 {m, n}번째 pixel에서 시작하는 부분과 URS 간의 RSSI 차이 값을 계산을 나타낸다.
$$\epsilon_{m,n} = \frac{\sum_{k=1}^{K} \sum_{j=1}^{J} \sum_{i=1}^{I} \left| \phi^{U}_{i,j,k} – \phi^{R}_{m+i-1,n+j-1,k} \right|}{\gamma} \quad \text{if} \quad \phi^{U}_{i,j,k} > \phi_{\text{min}} \\
1 \leq m \leq M – I + 1, \quad 1 \leq n \leq N – J + 1$$
여기서 $\phi_{\text{min}}$는 최소 RSSI 값으로 본 연구에서는 -100으로 설정하였다. Radio map에서 특정 비콘의 음영 지역은 $\phi_{\text{min}}$으로 채워지게 된다. 또한 $\phi^{U}_{i,j,k}$가 $\phi_{\text{min}}$보다 초과될 때만 RSSI 차이 값을 계산한다. $\gamma$는 URS에서 수신된 RSSI 값의 개수를 나타내며, normalization을 수행하게 된다. 결과적으로 $\epsilon_{m,n}$는 radio map과 URS간의 RSSI 값의 평균 차이 값을 나타내게 된다. 최종 사용자의 위치는 가장 작은 RSSI 차이 값을 갖는 픽셀의 위치에 URS의 PDR 궤적을 더한 위치가 된다.
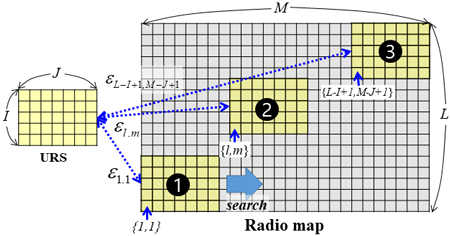
Fig. 7. Compare the URS with the radio map and consider the location with the highest similarity as the current user’s location.
시뮬레이션을 통해 다양한 RF 환경 및 PDR 오차에 대한 SC 성능을 분석하였다. 총 3가지의 PDR 궤적과 RF 인프라 환경을 설정하여, 각각의 PDR 궤적에 따라 radio map을 달리하면서 SC 성능을 분석하였다. Fig. 8은 시뮬레이션 환경을 보여준다. Test bed는 50 m × 50 m 크기이며, Fig. 8a는 4개, Fig. 8b는 5개, Fig. 8c는 9개의 RF 비콘을 설치하였다고 가정하였다. 또한, RF 비콘의 전파 모델은 Bahl & Padmanabhan (2000)을 참고하였다. 생성한 3가지 경우의 radio map은 Fig. 9와 같다.
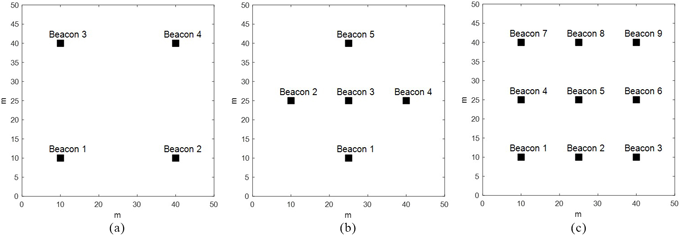
Fig. 8. Beacon installation environment for SC localization performance: (a) First beacon installation setting, (b) Second beacon installation setting, (c) Third beacon installation setting.
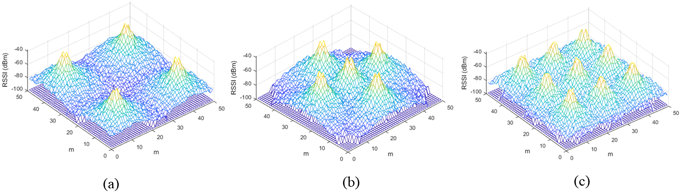
Fig. 9. Proposed radio map for SC. (a) First radio map, (b) Second radio map, (c) Third radio map.
PDR 궤적은 Fig. 10과 같이 생성하였다. 검은색은 reference 궤적이며, 붉은색은 PDR 궤적이다. Figs. 10a에서 10c까지 자이로센서의 바이어스를 점진적으로 증가시켰는데, Fig. 10b의 경우는 센서 바이어스의 부호를 변경하여 반대 방향으로 드리프트가 발생한다. 실험 시나리오는 시작점에서 반시계 방향의 사각형 경로를 한 바퀴 이동한 후 시작 위치로 다시 돌아오는 것으로 하였다. 보행자는 1초에 1 m씩 이동하였고, RSSI 벡터 또한 1초에 한 번씩 저장되도록 시뮬레이션을 구성하였다. 각 시나리오마다 총 120개의 epoch이 생성되었다. 보행자가 이동하면서 수신한 RSSI 벡터는 Fig. 11과 같다. 각 비콘의 수신 범위는 약 40 m이며, 비콘과 사용자의 거리가 20 m 이상 멀어지면 최소 RSSI 값인 -100이 저장된다.
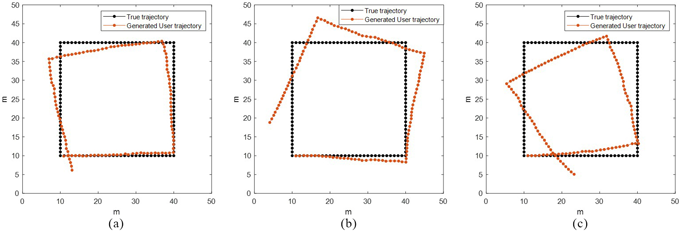
Fig. 10. Generated PDR trajectories for SC localization. (a) First PDR trajectory, (b) Second PDR trajectory, (c) Third PDR trajectory.
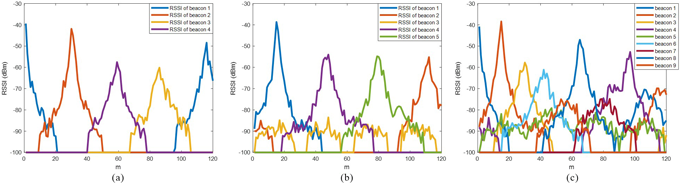
Fig. 11. RSSI vector signals of each scenario. (a) RSSI vector signal in the first scenario, (b) RSSI vector signal in the second scenario, (c) RSSI vector signal in the third scenario.
Radio map과 사용자 궤적이 각각 3가지씩이기 때문에 총 9개의 실험 결과를 도출할 수 있었다. 즉, 각 radio map에 대하여 3가지 PDR 궤적과 RSSI 벡터에 대한 SC 결과를 추정하였다. 편의를 위해 Fig. 8a를 1번 radio map, Fig. 8b를 2번 radio map, Fig. 8c를 3번 radio map으로 한다. Table 1은 사용자 궤적 및 radio map에 따른 각 시나리오의 평균, Root Mean Square Error (RMSE), 최대 오차를 보여준다. Table 1에 최대 오차를 표기한 이유는 fingerprinting 방법의 고질적인 문제인 추정 위치의 점프 현상이 있는지를 판가름하기 위해서다. Fig. 12는 각 시나리오에 대해서 전체 epoch에서의 위치 오차를 보여준다.
Table 1. SC performance analysis for each scenario according to radio map settings.
| 1st PDR trajectory | 2nd PDR trajectory | 3rd PDR trajectory | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean (m) | RMSE (m) | Max (m) | Mean (m) | RMSE (m) | Max (m) | Mean (m) | RMSE (m) | Max (m) | |
| 1st Radio map (4 beacon installed) | 4.49 | 5.28 | 20.4 | 5.41 | 6.40 | 21.84 | 4.85 | 5.64 | 19.03 |
| 2nd Radio map (5 beacon installed) | 3.75 | 4.04 | 7.21 | 3.72 | 4.02 | 6.4 | 3.70 | 4.03 | 8.06 |
| 3rd Radio map (9 beacon installed) | 3.46 | 3.79 | 6.40 | 3.62 | 3.96 | 7.2 | 3.83 | 4.15 | 7.81 |
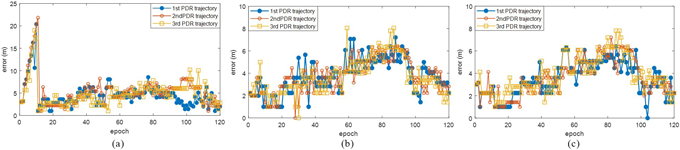
Fig. 12. Error across all epochs for each scenario. (a) SC error for each scenario using the first radio map, (b) SC error for each scenario using the first radio map, (c) SC error for each scenario using the first radio map.
SC 결과를 보면 보행자 1번 radio map을 사용한 경우 모든 PDR 경로에 대해서 초기 오차가 크게 발생하였다. 이는 1번 radio map의 경우 시작지점에서 하나의 비콘 신호만 수신되기 때문에, 새로운 비콘 신호가 수신되기 전까지는 추정 위치가 수렴하지 않는 것으로 보인다. 2번 radio map의 경우는 강한 신호는 하나만 수신되지만 다른 미약 신호를 통해서 보행자의 위치가 빠르게 수렴하는 것을 확인할 수 있다. 1번 radio map을 제외하고는 모든 시나리오에서 최대 오차 10 m 미만으로 추정되었다. 또한 모든 경우에 평균 오차는 5 m 미만으로 추정되었으며, 설치된 RF 비콘 수가 증가될수록 미미하지만 오차가 감소하는 것을 확인하였다. PDR 오차에 따른 SC 성능을 보면, 본 시뮬레이션에서 설정한 PDR 오차는 크게 성능에 영향을 미치지는 않는 것으로 확인되었다. SC는 최근 일정 길이의 PDR 궤적만 사용하기 때문에, Fig. 10c 수준의 PDR 오차는 SC의 성능에 영향이 작았다. 하지만, 이론적으로 PDR 오차가 SC 성능에 영향을 미치는 것은 맞기 때문에, PDR 오차가 극단적으로 큰 경우 또는 URS가 수십 미터가 되는 상황에서도 SC 성능이 좋을 것이라고는 단정할 수 없을 것이다. Fig. 13은 모든 실험결과의 오차에 대한 Cumulative Density Function을 보여준다. 모든 그래프에서 오차가 5 m 이하일 때 급격하게 확률이 증가하였으며, 모든 경우에 90% 이상의 확률로 5 m 이하의 오차를 보여줬다. 2번과 3번 radio map에서는 PDR 궤적마다 매우 유사한 결과를 얻는 것으로 확인된다.
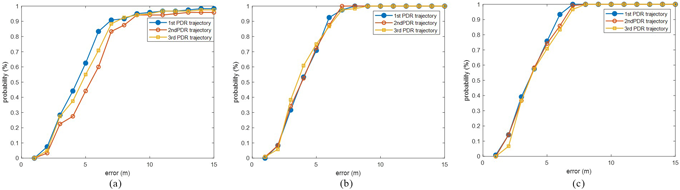
Fig. 13. CDF for SC error. (a) CDF each scenario using the first radio map, (b) CDF for each scenario using the second radio map, (c) CDF for each scenario using the third radio map.
본 논문에서는 RSSI 벡터를 누적하고, 이를 사용자의 경로와 결합하여 URS를 생성한 후, radio map과 비교하는 SC 방법에 대해서, PDR 궤적 및 RF 비콘 설치 환경을 변화시키면서 시뮬레이션을 진행하고 위치 추정 결과를 분석하였다. RF 환경에 따른 SC 성능은, Test bed에 비콘이 많이 설치되어 있을수록 좀더 안정적인 성능이 유지되는 것으로 확인되었다. 하지만 4개만 설치한 경우에도 초반에는 위치 오차가 컸지만, URS가 증가함에 따라 안정적인 위치 추정이 가능함을 확인하였다. 또한 PDR 궤적과 SC 성능과의 관계는 PDR 오차가 적을수록 SC의 위치 오차도 적긴 했지만, 그 차이는 미미했으며, 수신되는 비콘 신호의 개수가 클수록 영향이 적었다.
홀 환경에서 적은 수의 비콘을 사용할 경우, 기존 단일 RSSI 벡터 기반의 fingerprinting 방법으로는 위치 추정이 불규칙하게 점프할 가능성이 있지만, SC 방법은 보다 안정적인 위치 추정이 가능함을 확인하였다. 사용자의 측정치를 클라우드 또는 온디바이스에서 누적할 수 있다면, SC 방법은 정확한 실내 위치 추적을 위한 고려해 볼만한 대안이 될 것이다.
SC는 URS에 저장된 RSSI 공간 패턴과 radio map의 RSSI 공간 패턴을 비교하여 위치를 추정한다. 만약 PDR 궤적의 오차가 증가하면, 두 공간 패턴 사이의 편차가 발생하여 위치 오차를 증가시킬 것이다. 하지만, SC의 경우 URS에 포함되는 PDR 누적 오차는 제한적이기 때문에 일정 수준의 PDR 오차에 대해 비교적 안정적인 위치 추정을 제공하는 것을 확인하였다.
RSSI 값은 사용자의 수신 방향과 기종에 따라 변화할 수 있으며, 이는 같은 위치에서도 다르게 측정될 수 있다. Radio map은 RP에서 수신한 절대적인 RSSI 신호 값을 저장하고 있기 때문에, 이러한 다양한 요인에 영향을 받는 RSSI 벡터를 이용하여 위치를 추정하면 정확성이 떨어질 수 있다. 현재, 방향이나 기종에 따라 다양한 radio map을 만들어서 운영 중이지만, 이에 대한 더 현실적인 해결책이 필요하다.
기존의 fingerprinting 방법은 단일 RSSI 벡터만을 사용하여 사용자의 위치를 추정하므로, 멀티패스가 심한 실내 환경에서 사용자의 위치를 안정적으로 추정하기 어렵다. 이를 보완하기 위해 제안된 SC 방법은 사용자의 경로와 누적된 RSSI 벡터를 이용해 URS를 생성하고, 이를 radio map과 비교하여 위치를 추정한다. SC 방법은 더 많은 RSSI 신호를 사용하기 때문에 멀티패스와 같은 오차 요인에 대해 기존 기술보다 강인하며, 사용자의 이동 궤적과 RSSI 벡터를 함께 사용하기 때문에 단일 벡터를 사용하는 것보다 높은 공간 분별력을 가진다. 시뮬레이션을 통해 동일한 환경에서 SC 방법이 기존 fingerprinting 방법보다 안정적인 위치 정확도를 보임을 확인하였다. 향후 실제 환경에서 SC 방법의 성능을 점검하고, 성능 안전성을 향상시키는 연구를 진행할 예정이다.
This work was undertaken with collaboration among all authors. B. S.; conceptualization, methodology, formal analysis, software, writing— review and editing, T. L.; conceptualization, review and editing.
The authors declare no conflict of interest.
Bahl, P. & Padmanabhan, V. N. 2000, RADAR: An In-Building RF-based User Location and Tracking System, in Proc. IEEE INFOCOM Conf. Comput. Commun. 19th Annu. Joint Conf. IEEE Comput. Commun. Societies, 26-30 Mar. 2000, Tel Aviv, Israel, pp.775-784. https://doi.org/10.1109/INFCOM.2000.832252
Brunato, M. & Battiti, R. 2005, Statistical Learning Theory for Location Fingerprinting in Wireless LANs, Computer Networks, 47, 825-845. https://doi.org/10.1016/j.comnet.2004.09.004
Guo, G., Chen, R., Niu, X., Yan, K., Xu, S., et al. 2023, Factor Graph Framework for Smartphone Indoor Localization: Integrating Data-Driven PDR and Wi-Fi RTT/RSS Ranging, IEEE Sensors Journal, 23, 12346-12354. https://doi.org/10.1109/JSEN.2023.3267121
He, S. & Chan, S.-H. G. 2016, Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons, IEEE Commun. Surv. Tutor. 18, 466-490. https://doi.org/10.1109/COMST.2015.2464084
Jang, J.-W. & Hong, S.-N. 2018, Indoor Localization with WiFi Fingerprinting Using Convolutional Neural Network, 2018 Tenth International Conference on Ubiquitous and Future Networks (ICUFN), 03-06 July 2018, Prague, Czech Republic, pp.753-758. https://doi.org/10.1109/ICUFN.2018.8436598
Lee, J. H., Shin, B., Shin, D., Park, J., Ryu, Y. S., et al. 2019, Surface correlation-based fingerprinting method using LTE signal for localization in urban canyon, Sensors 19, 3325. https://doi.org/10.3390/s19153325
Li, F., Liu, M., Zhang, Y. & Shen, W. 2019, A Two-Level WiFi Fingerprint-Based Indoor Localization Method for Dangerous Area Monitoring, Sensors 19, 4243. https://doi.org/10.3390/s19194243
Shang, S. & Wang, L. 2022, Overview of WiFi fingerprinting-based indoor positioning, IET Communications, 16, 725-733. https://doi.org/10.1049/cmu2.12386
Shen, G., Chen, Z., Zhang, P., Moscibroda, T., & Zhang, Y. 2013, Walkie-Markie: Indoor Pathway Mapping Made Easy, Proceedings of the 10th USENIX Conference on Networked Systems Design and Implementation, Apr. 2-5, 2013, Berkeley, CA, pp.85-98. https://dl.acm.org/doi/10.5555/2482626.2482636
Shin, B., Lee, J. H. & Lee, T. 2023, Novel indoor fingerprinting method based on RSS sequence matching, Measurement, 223, 113719. https://doi.org/10.1016/j.measurement.2023.113719
Singh, N., Choe, S., & Punmiya, R. 2021, Machine Learning Based Indoor Localization Using Wi-Fi RSSI Fingerprints: An Overview, IEEE Access, 9, 127150-127174. https://doi.org/10.1109/ACCESS.2021.3111083