Hyung Keun Lee1†![]() , Jeongrae Kim2
, Jeongrae Kim2![]() , Kwan-Dong Park3
, Kwan-Dong Park3![]() , Dong-Hyo Sohn4
, Dong-Hyo Sohn4![]() , Junseok Hong4
, Junseok Hong4![]() , Jong-Kyun Chung4
, Jong-Kyun Chung4![]() , Byung-Kyu Choi4
, Byung-Kyu Choi4![]()
1Department of Electronics and Information Engineering, Korea Aerospace University, Gyeonggi-do 10540, Korea
2Department of Aeronautical and Astronautical Engineering, Korea Aerospace University, Gyeonggi-do 10540, Korea
3Department of Geoinformatic Engineering, Inha University, Incheon 22212, Korea
4Center for Space Navigation and Geodesy, Korea Astronomy and Space Science Institute, Daejeon 34055, Korea
†Corresponding Author: Hyung Keun Lee, E-mail: hyknlee@kau.ac.kr
Citation: Lee, H. K., Kim, J., Park, K.-D., Sohn, D.-H., Hong, J., et al. 2025, Design of Regional Ionosphere/Differential Code Bias Simulator Based on RINEX/IONEX Files, Journal of Positioning, Navigation, and Timing, 14, 299-312.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2025 September, Volume 14, Issue 3, pages 299-312. https://doi.org/10.11003/JPNT.2025.14.3.299
Received on Aug 07, 2025, Revised on Aug 18, 2025, Accepted on Aug 30, 2025, Published on Sep 15, 2025.
Copyright © The Institute of Positioning, Navigation, and Timing
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
This paper proposes an efficient Regional Ionospheric Map (RIM) / Differential Code Bias (DCB) simulator based on Receiver Independent Exchange (RINEX) and IONosphere Map Exchange (IONEX) format files. Using the proposed simulator, we evaluated if it is possible to discriminate and estimate RIM and DCB variables based on a single regional satellite constellation and reference stations distributed in a restricted area. The proposed simulator embeds a recursive estimator that can discriminate and estimate RIM and DCB variables based on basic RINEX format navigation and observation files. It facilitates the evaluation of accuracy and precision by referencing the IONEX files generated by the estimator and International GNSS Service (IGS). Experiments were performed to evaluate the simulator under difficult environment by applying the RINEX data of the 4 regional satellites received by 11 reference stations distributed in Asia and Oceania region. By the experiment result, the average and the standard deviation of the vertical ionospheric delay (VID) difference were obtained as 0.35 m and 2.73 m, respectively. In the case of satellite DCB, the estimated values matched the group delay values in the broadcast ephemeris parameters with the standard deviation within 0.6 m if the unknown mean value were ignored.
RIM, DCB, simulator, estimator, IGS, RINEX, IONEX
Global Navigation Satellite System (GNSS)의 정확도는 전리층 지연, 대류권 지연, 위성/수신기 시계오차, 궤도오차, 그리고 다중경로오차 등 다양한 오차 요인에 영향을 받는다. 이들 중 특히 전리층 지연은 위성으로부터 수신기까지 정상적인 항법신호의 송수신이 수행되어도 위치오차에 가장 크게 영향을 미치는 오차요인으로 알려져 있다. 그 중요성으로 인하여 전리층 지연에 대한 연구는 오랜 기간동안 다양한 기관과 연구자들에 의해 진행되어 왔다.
전리층 지연에 대한 연구는 크게 전리층 추정 방식 자체에 대한 연구와 추정된 전리층 정보를 활용하는 응용 성능 분석 연구로 나눌 수 있다. 전자에 해당하는 경우로서 International GNSS Service (IGS) Global Ionospheric Map (GIM), Space-Based Augmentation System (SBAS) 전리층 보정계수, M_GIM (Zhou et al. 2023) 등을 들 수 있으며, 후자는 주로 전리층 추정 방식에 대한 연구의 결과물을 다양한 응용 분야에 적용했을 때 예상되는 성능을 분석하는 것에 해당된다.
전리층 추정에 대한 연구는 대상 분포 영역의 크기에 따라 전역 전리층과 지역 전리층에 대한 연구로 구분된다. 전역 전리층 추정은 모든 대륙에 분포된 상시관측소를 활용하여 전체 지구 영역 상공에 분포된 전리층 지연을 추정하는 것이며 (International GNSS Service 2005, Hernández-Pajares et al. 2009, Li et al. 2020, Zhou et al. 2023), 지역 전리층 추정은 국소 지역에 분포된 상시관측소를 활용하여 한정된 위경도 영역에 분포된 전리층 지연을 추정하는 것이다 (Choi et al. 2018, Natras et al. 2023, Choi et al. 2024).
항법신호에 사용되는 주파수에 따라 전리층 지연 값은 그 크기가 달라진다. 따라서, 전리층 지연값은 서로 다른 두 주파수에서 획득된 의사거리의 차에 해당되는 Geometry Free (GF) 결합을 하게 되면 손쉽게 추출할 수 있는 것으로 알려져 있다. 실제로는 GF 결합에 전리층 지연이 덧붙여져 Differential Code Bias (DCB)가 수반되므로 한 시점의 측정치들로 두 종류의 값을 분리하기 어렵고 다수 시점의 측정치를 누적하여 가관측성을 향상시키면 두 종류의 값을 분리할 수 있다 (Choi et al. 2012). DCB는 송신기 혹은 수신기 내부 회로의 주파수 의존성에 의하여 발생하며 좀 더 상세하게 분류하면 Satellite Differential Code Bias (SDCB)와 Receiver Differential Code Bias (RDCB)로 구분할 수 있다 (Choi et al. 2018, Choi et al. 2025).
전리층 지연의 추정과 관련된 대다수의 기존 연구는 전역 위성항법시스템을 한 개 이상 포함한 다중 위성항법시스템을 활용하여 전리층 지연과 DCB의 추정에 활용하고 있다. 반면, 지역 위성항법시스템만을 단독으로 활용하여 전리층 지연과 DCB를 분리 추정하는 연구 결과는 기존 문헌에서 찾기 어렵다.
지역 전리층 지연과 DCB의 분리 추정에 있어서 가장 어려운 상황은 정지궤도 위성을 포함하여 작은 수의 지역 가시 위성들만을 활용하는 상황이다. 정지궤도 위성은 관측소에서 위성으로의 가시선 방향이 항상 일정하게 유지된다. 따라서, Total Electron Content (TEC)와 DCB의 관측계수가 변화하지 않게 되어 가관측성이 결여되면 단일 관측소 측정 정보만으로는 두 주요변수의 분리가 불가능하게 된다.
지역 위성항법시스템에 포함된 정지궤도 위성의 경우에 위성, 전리층, 수신기 사이의 기하 개형에 변화가 없어 기울기 계수는 시간이 경과하여도 변화하지 않게 된다. 이와 같은 이유로, 정지궤도 위성을 포함한 지역 위성항법시스템을 단독으로 활용하여 전리층 지연과 DCB에 대한 분리 추정을 시도하면 난점이 발생할 것으로 예상된다.
동일한 한 개의 정지궤도 위성 신호에 대하여 충분히 넓게 분포하는 다수의 상시관측소를 활용하여 측정할 경우에는 기울기 계수와 전리층 통과 지점이 다양화되어 지역 전리층지연에 대한 가관측성 확보가 가능할 수 있다. 추정해야 할 전리층 지연 상태변수들의 개수에 대비하여 충분히 많은 수의 관측소를 넓은 지역에 설치 활용하게 되면, 동일 위성에 대한 시선각 방향이 다양화되므로 전리층 지연에 대한 관측행렬이 가관측성을 확보하게 되어, 전리층 지연과 Combined DCB (CDCB)의 분리 추정이 가능하게 된다. SDCB와 RDCB가 결합된 CDCB가 전리층 지연으로부터 분리되면, 이후에는 제한 조건을 적용하여 SDCB와 RDCB를 보다 상세하게 분리할 수 있다.
지역 전리층 추정과 관련하여 지역 위성항법시스템을 포함한 다양한 위성군과 상시관측소의 조합에 대하여 전리층 지연과 DCB의 분리 추정 가능성을 가늠하고, 이에 덧붙여 어느 정도의 정확도로 전리층지연, SDCB, 그리고 RDCB를 분리 추정할 수 있는지 가늠하기 위해서는 지역 전리층 지연 및 DCB 분리 추정기를 포함한 효율적인 성능분석 시뮬레이터가 필요하다.
본 논문에서는 Receiver Independent Exchange (RINEX)와 IONosphere Map Exchange (IONEX) (Schaer et al. 1998) 포맷의 파일들에 기반한 효율적인 지역전리층/DCB 시뮬레이터를 제안하고, 이를 활용하여 단일 지역 위성항법군과 국소 지역에 분포한 상시관측소를 활용할 경우 지역전리층과 DCB의 분리 추정이 어느 정도 가능한지를 평가하였다. 제안된 시뮬레이터는 기본적인 방송궤도력과 RINEX 관측 파일들을 입력으로 활용하여 지역 전리층과 및 DCB를 분리 추정할 수 있는 재귀적인 추정기를 포함하고 있으며, 추정기가 산출한 IONEX 파일을 IGS가 산출한 수직 전리층 정보가 정리되어 있는 IONEX 파일과 비교하여 (International GNSS Service 2005, Hernández-Pajares et al. 2009, Li et al. 2020) 분리 추정된 지역전리층과 DCB의 정확도 및 정밀도를 편리하게 분석할 수 있는 장점을 가진다.
시뮬레이터에 필요한 RINEX와 IONEX 파일들은 National Aeronautics and Space Administration (NASA)의 Crustal Dynamics Data Information System (CDDIS) 서버에 접속하면 획득이 가능하다. RINEX 파일의 경우에는 전지구 영역에 분포된 350개 이상의 다양한 상시관측소를 선별 활용할 수 있으며, IONEX 파일의 경우에는 JPL, CODE, ESA, NRCan, 그리고 UPC 등의 개별 분석 센터들이 산출한 결과물과 이들을 전체적으로 취합한 결과물을 활용할 수 있다 (Li et al. 2020). 이와 같은 IONEX 데이터를 기준 값으로 활용할 경우에 추정된 전리층 지연 값과 DCB의 추정 오차의 평균 값과 분산 값을 다양한 시공간 해상도로 분석할 수 있다.
본 논문의 구성은 다음과 같다. 2장에서는 지역전리층/DCB 분리 추정기를 설계함에 있어서 중점적으로 고려해야 할 사항을 정리하였다. 3장에서는 효율적인 시뮬레이터가 갖춰야 될 주요 기능, 제안된 지역 전리층 및 DCB 추정기의 상세 사항과 특징, 그리고 전체적인 시뮬레이터의 구성과 특징을 다루었다. 4장에서는 기존 문헌에서 찾기 어려운 두 종류 실험 결과를 다루었다. 첫번째 실험은 지역 위성항법시스템을 단독으로 활용할 경우 얻을 수 있는 지역 전리층 지도의 정확도를 가늠하기 위한 것이고, 두번째 실험은 지역 위성항법시스템을 단독으로 활용할 경우 얻을 수 있는 SDCB의 정밀도를 가늠하기 위한 것이다. 마지막으로 5장에서는 결론을 맺도록 한다.
이중 주파수 코드 및 위상 측정치를 각각 GF 결합하여 전리층 지연 값을 추정하기 위하여 기존에 널리 쓰이는 방법은 크게 거리영역 평활화와 위상 평준화(phase leveling)가 있다. 이들 중 거리영역 평활화는 위상평활화 코드 필터를 구동하여 매 측정 시점과 측정시점 사이에서 코드와 위상 측정치를 결합하고 스무딩된 코드를 누적하는 방법이다 (Hatch 1983). 위상 평준화는 코드 측정치와 비교에 의하여 위상 측정치에 포함된 미지상수(unknown constant ambiguity)를 추정 보상하여 평준화된 GF 위상 측정치를 보상하여 코드 측정치와 등가하게 활용하는 방법이다 (Ya’acob et al. 2007).
위의 두 대표적인 방법들은 측정치 자체의 정밀도를 향상시킬 수 있으나 정확도와 상태변수 분리에 관련된 가관측성 향상에 기여하지 않으므로, 주파수간/채널간 바이어스의 분리 추정에 도움이 되지 않는다. 따라서, 위의 두 방법은 주로 장기간 측정치를 누적하여 한 번에 상태변수를 추정하는 batch 방식의 추정기와 결합하여 활용된다. Batch 방식 추정기는 정확도 관점에서 유리한 측면이 있으나 후처리에 적합하며 실시간 운영에는 난점이 발생할 확률이 있다.
제안된 추정기는 상태변수 영역의 위상평활화 코드 필터를 구동하면서 재귀적으로 전리층 지연과 CDCB를 분리 추정하여 batch 방식의 단점을 보완하면서 실시간성을 갖추도록 설계하였다. 또한, 위성군의 궤도 주기별로 한 번 정도의 빈도로 간단한 결합식에 의하여 CDCB를 SDCB와 RDCB로 분리 추정할 수 있도록 고려하였다.
제안된 추정기가 선정 활용하는 상태변수는 수직 전리층 지연 값인 Vertical Ionospheric Delay (VID)에 대한 공간 기저함수 계수, CDCB, 그리고 Differential Cycle Ambiguity (DCA)가 있다. 여기서 VID는 Vertical Total Electron Content (VTEC)을 거리 단위로 환산한 것이다. VID와 CDCB는 필수적인 상태변수에 해당되며, 실수 미지상수 DCA는 기존 기법에 있어서 위상 평준화와 유사한 효과를 내면서 재귀적인 방식으로 실시간 처리가 가능하도록 선정된 상태변수이다.
SDCB는 위성에 탑재된 송신기 내부 회로에서 다른 주파수의 신호를 만들어 내는 회로 및 소프트웨어가 동일하지 않음에 기인하는 것으로 알려져 있다 (Coco et al. 1991). SDCB 추정값의 변화 추이를 관찰한 기존 연구 결과에 의하면 SDCB의 변화는 신호 자체의 불연속과 변화에 덧붙여서 위성의 교체로 인해서도 발생하며 이는 1.8 ns에 이를 수 있다고 알려져 있다. 또한, 같은 위성군(constellation) 내 같은 세대의 위성들은 서로 비슷한 SDCB 값을 가짐을 확인하였다 (Xiang et al. 2020).
RDCB의 경우도 SDCB의 경우와 유사하게 수신기 내부 회로에서 다른 주파수의 신호를 만들어 내는 회로 및 소프트웨어가 동일하지 않음에 기인한다. 따라서, 하드웨어 및 소프트웨어가 변경되지 않고 온습도 등의 주변 환경이 유지되면 몇 주 정도의 장기간 동안에도 그 값이 크게 변화하지 않는다. 다만, 활용된 소자의 규격과 비용의 차이에 의해서 일반적으로 SDCB가 RDCB보다 바이어스나 랜덤 오차 관점에서 상대적으로 더 높은 정밀도를 가진다.
이와 같은 이유로, 하루 기간 이내의 자료를 처리하여 DCB를 추정하는 용도에는 시간에 따른 변화가 거의 없는 랜덤 상수(random constant)로 모델링 하는 것이 가능하다. 몇 일 이상의 장기간 분석을 위해서는 필요에 따라 시간 경과에 따라 불확실성이 증가하는 랜덤워크(random walk)나 시상관성을 가지는 마코프 프로세스(Markov process)로 모델링 하는 것도 가능하리라 판단된다.
수직 전리층 지연과는 달리 SDCB와 RDCB는 위성의 운동에 의한 위성별 가시선 방향 경사계수(slant factor)의 변화에 영향을 받지 않는다. 경사계수는 일반적으로 위성과 수신기 사이의 기하학적 개형이 시간적으로 혹은 공간적으로 달라짐에 따라 다른 값을 가지게 된다. 따라서, 경사계수에 영향을 받는 수직 전리층과 영향을 받지 않는 CDCB의 분리 추정이 가능하게 된다.
한편, CDCB로부터 SDCB와 RDCB의 분리함에 있어서는 두 변수 모두가 시간에 따라 변화하지 않는 특성으로 인하여 난점이 발생하게 된다. 이와 같은 난점을 해결하기 위하여 (1) DCB 값들 사이에 제약 조건을 가하는 방법과 (2) 한 개의 기준을 설정하고 기준이 되는 DCB를 실제로 측정하는 방법이 널리 활용되고 있다. 본 연구에서는 (1)번 방식을 채택하였다.
전리층 지연 값의 산출 빈도를 정하기 위해서는 기존 위성항법 시스템의 전리층 지연 계수 서비스의 빈도를 참고할 필요가 있다. 다수의 위성항법시스템들 중에서 가장 최근의 지역 위성항법시스템에 해당되는 Quasi-Zenith Satellite System (QZSS)의 경우 일반 사용자들에 대한 전리층 계수는 720초에 한 번씩 방송된다 (Cabinet Office 2024). 전리층 지연 정보를 별도로 추출하여 방송하지는 않지만, L1 주파수를 활용하는 차분 위성항법 서비스에 포함되는 의사거리 보정정보는 30초에 한 번씩 방송된다 (Cabinet Office 2025a). 또한, L6 주파수 사용자에 제공되는 경사 전리층 지연은 30초에 한 번씩 방송된다 (Cabinet Office 2025b).
방송 빈도와 추정 갱신 빈도는 다른 의미를 가지지만, 최대한 보수적인 관점에서 전리층 지연 값의 추정기의 상태변수 갱신 빈도가 가장 빈번한 방송 빈도를 수용할 수 있도록 설계하는 것이 바람직할 것이다. 따라서, 목표로 하는 전리층 지연 값의 산출 빈도는 30초로 하되 필요에 따라 1분 혹은 1시간 정도의 값들로 수정할 수 있도록 추정기를 설계하였다.
제안된 추정기는 재귀적인 구조의 칼만필터 알고리즘을 채용하고 있으며, 칼만필터의 상태변수는 식 (1)과 같이 구성된다.
$$X =
\begin{bmatrix}
PC \\
CDCB \\
DCA
\end{bmatrix}$$
여기서 $PC$ (Polynomial Coefficient)는 기저함수 계수 벡터, $CDCB$는 혼합 DCB (Differential Code Bias) 벡터, $DCA$는 DCA (Differential Cycle Ambiguity) 벡터이다.
식 (1)에 나타난 바와 같이 제안된 추정기는 CDCB와 DCA를 필수적인 상태변수로 활용하였다. CDCB는 GF 코드 측정치에 포함된 값이며 DCA는 GF 위상 측정치에 포함된 미지 상수 값이다. CDCB와 DCA는 위성과 상시관측소 조합 각각에 대하여 개별 상태변수가 할당된다. 예시로서, 공간기저함수의 차수가 9차, 전체 위성의 갯수가 50개, 활용 상시관측소의 개수가 11개라고 가정하면 공통 상태변수는 상수항 계수를 추가하여 10(=9+1)개가 되며, CDCB와 DCA는 각각 50×11개가 개별 상태변수로 활용된다.
CDCB와 DCA를 필수적인 상태변수에 포함시킴으로써 제안된 추정기는 기존의 TEC 추정 알고리즘이 채용하는 위상평활화 코드와 유사한 효과를 얻으며 동시에 위상 측정치에 발생하는 이상 현상에도 간단한 검출기를 활용하여 효율적으로 대처할 수 있다. 또한, 후처리 위상 평준화 방법과 유사한 정밀도의 향상을 실시간 알고리즘의 운용에서도 얻을 수 있는 장점을 가지게 된다.
식 (1)과 같이 구성된 상태변수에 대하여, 서로 다른 주파수의 코드 및 위상 측정치의 GF 조합은 식 (2)와 같이 모델링 된다.
$$\begin{align}
\rho_{2} – \rho_{1}
&= OF \cdot VID + CDCB + v_{\rho} \notag \\[6pt]
\phi_{2} – \phi_{1}
&= -\,OF \cdot VID + DCA + v_{\phi}
\end{align}$$
여기서 $OF$는 경사 계수 (obliquity factor) 벡터, $VID = BF(\phi, \lambda)\,PC$는 수직 전리층 (vertical ionospheric delay) 벡터, $BF(\phi, \lambda)$는 위도 $\phi$와 경도 $\lambda$에 영향을 받는 공간 기저함수 (basis function), $v_{\rho}$는 코드 측정 오차, $v_{\phi}$는 위상 측정 오차이다.
식 (2)에 모델링 된 바와 같이 제안된 추정기는 지역 전리층 지연의 분포를 다루기 위하여 다항식 함수 혹은 구면 함수(spherical harmonic function)를 유연성 있게 기저함수로 선택하여 활용할 수 있다. 칼만필터의 상태변수들은 식 (3)에 의하여 시간 전달된다.
$$\begin{align}
PC(t_{k+1})
&= PC(t_k) + w_{PC}(t_k) \notag \\[6pt]
CDCB(t_{k+1})
&= CDCB(t_k) + w_{CDCB}(t_k) \notag \\[6pt]
DCA(t_{k+1})
&= DCA(t_k) + w_{DCA}(t_k)
\end{align}$$
여기서 $t_k$는 $k-$번째 상태변수 갱신 시점이다.
위에 설명된 칼만필터 알고리즘은 Fig. 1에 도시된 전체 추정기의 흐름도에 따라 지역전리층, CDCB, 그리고 DCA를 매 시점 산출하게 된다. 추정기의 기능은 Fig. 2에 도시된 바와 같이 폴더 자료 추출부, 자료 변환 해독부, 추정 알고리즘부, 결과 표시부 등 크게 네 부분으로 나눌 수 있다. 폴더 자료 추출부는 일자별로 저장되어 있는 압축 포맷 파일을 텍스트 파일로 추출하는 기능을, 자료 변환 해독부는 RINEX 포맷의 텍스트 파일을 측정치와 궤도정보로 변환하는 기능을, 추정 알고리즘부는 추정기의 초기화, 시간전달, 그리고 측정갱신 기능을, 그리고 결과 표시부는 다양한 형태의 그림을 도시하고 저장하는 기능을 수행한다. 네 가지 주요 부분 사이의 인터페이스는 Fig. 3에 도시된 바와 같이 주로 gzip 혹은 zip 형식의 압축파일, RINEX 및 IONEX 포맷의 텍스트 파일, 그리고 지정된 형식의 데이터 구조체로 구성된다.

Fig. 1. Flow of the proposed Kalman filter algorithm for estimating regional ionospheric delay and combined differential code biases.
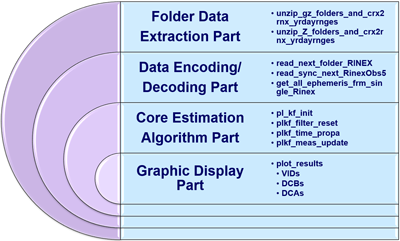
Fig. 2. Overall structure and main component software modules of the proposed algorithm for estimating regional ionospheric delay and differential code biases.
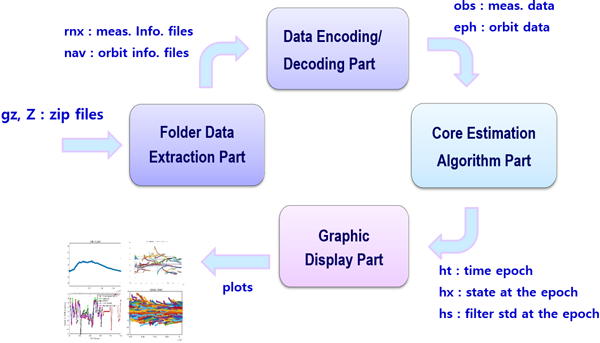
Fig. 3. Inputs and outputs between main component software modules.
제안된 추정기는 기존에 널리 알려진 전리층 추정 소프트웨어와 유사한 기능을 수행한다. 최근에 발표된 전리층 추정 소프트웨어 M_GIM (Zhou et al. 2023)은 GPS, GLONASS, BeiDou, Galileo, QZSS 등의 측정 데이터를 모두 처리하여 GIM과 DCB를 분리 추정할 수 있는 소프트웨어이다. M_GIM은 내부적으로 M_DCB (Jin et al. 2012) 알고리즘을 포함하고 있으며, 하루를 24등분하여 1시간 단위로 semi-batch 방식으로 전리층 TEC 추정치를 높은 정확도로 생성한다. 반면, 높은 정확도를 얻기 위하여 반드시 정밀궤도력과 IGS DCB 정보를 활용해야 하는 종속적 한계점을 가지고 있다. 또한, 시간 해상도를 일부 향상시킬 수 있지만 근본적으로 batch 방식을 채용하는 특성으로 인하여 시간 해상도의 향상에는 한계가 있을 것으로 분석된다.
이에 대비하여 제안된 추정기는 정밀궤도력과 IGS DCB 정보를 필수적으로 요구하지 않고, 재귀적인 방식으로 구동되며, 시간 해상도에 크게 제약이 없는 특징을 가진다. 또한, 지구 좌표계(earth coordinate system)와 태양 좌표계(solar coordinate system) 사이의 좌표 변환 모듈을 추가할 경우에 전역 전리층 지도의 추정에도 용이하게 확장 가능하도록 설계하였다.
시간에 따라 변화하지 않는 공통된 특성으로 인하여 SDCB와 RDCB를 CDCB로부터 분리하는 데에는 난점이 발생하게 된다. 이와 같은 난점을 해결하기 위하여 제안된 추정기는 SDCB 값들 사이에 제약 조건을 가하는 방법을 적용하여 분리 추정하는 방식을 활용하고 있다. Fig. 4는 칼만필터로부터 선택된 모든 CDCB를 누적하고 SCB에 대한 제약 조건을 적용하여 SDCB와 RDCB를 분리 추정하는 과정을 요약한 순서도이다.
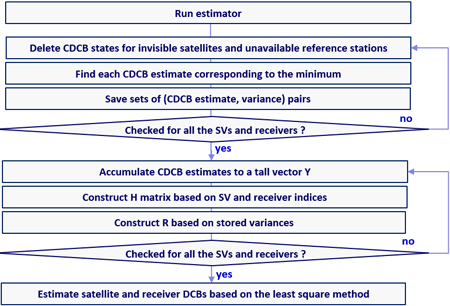
Fig. 4. Overall flow of the discriminated estimation of satellite and receiver differential code biases from accumulated combined differential code biases.
혼합 DCB로부터 SDCB와 RDCB의 분리 갱신 주기는 위성군에 소속된 모든 위성에 대한 측정치가 확보될 수 있는 위성군 궤도 주기보다 길어야 된다. 그러나, 지역에 분포된 감시국을 활용할 경우에는 모든 위성이 관측되지 않은 경우가 발생할 수 있다. 이와 같은 예시로서 2021년 3월 31일을 들 수 있다. Day Of Year (DOY) 090에 해당되는 하루 기간동안 10개의 감시국이 측정한 항법 데이터에는 PRN 11번 GPS 위성에 대한 적절한 측정값이 발견되지 않았다. 이와 관련된 사항은 향후 실험 부분에서 추가적으로 언급할 예정이다.
국소 지역에 분포된 모든 상시관측소를 활용하여도 가용하지 않는 위성이 존재하는 경우에 대비하기 위해서는, 해당 위성을 식별하고 추가적인 방법을 동원하여 SDCB와 RDCB를 분리 추정하는 방안이 필요하다. 제안된 추정기는 Fig. 5와 같이 가용하지 않은 위성에 해당하는 SDCB를 추정기의 상태변수에서 제외하고 추정하는 방법을 모듈화 하여 미관측 위성이 있는 경우를 대비하였다.

Fig. 5. Elimination of satellite differential code bias corresponding to the invisible satellite from the estimator state variables.
지역전리층/DCB 추정기의 성능을 분석하고 미비점을 보완하기 위한 목적으로 Fig. 6에 도시된 구조의 시뮬레이터를 설계 및 구현하였다. 구현된 시뮬레이터는 활용하고자 하는 상시관측소를 텍스트 목록 형태로 유연하게 설정할 수 있으며, 항법위성군, 주파수, 기저함수의 종류(구면조화함수 혹은 다항함수) 및 차수, 지역전리층 갱신 주기, 지역전리층 추정값의 출력 주기 등을 텍스트 형태의 옵션 파일에서 설정 가능하도록 하였다.
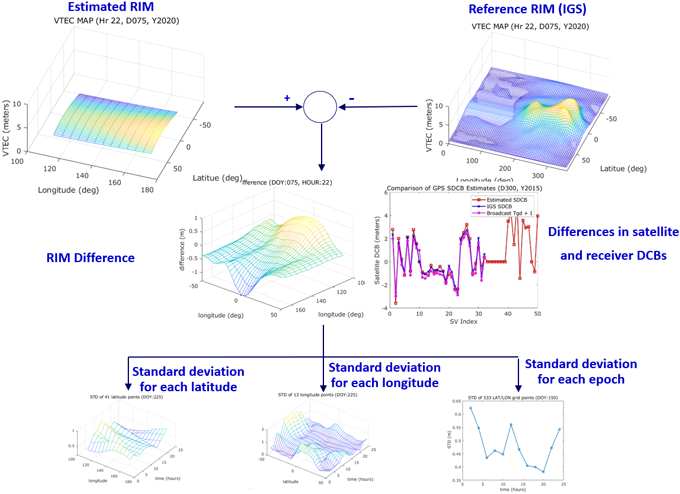
Fig. 6. Simulator structure to evaluate the accuracy of the regional ionospheric map/combined differential code bias estimator.
시뮬레이터는 전리층 지도와 관련된 기능으로 (i) IONEX 포맷의 텍스트 데이터로부터 (시간, 위도, 경도) 별 전리층 지연 값을 읽는 기능, (ii) 매 시점 (위도, 경도)를 기반으로 3차원 전리층 지도를 현시하는 기능, 그리고 (iii) 산출된 (시간, 위도, 경도) 별 전리층 지연값을 IONEX 포맷의 텍스트 데이터로 저장하는 기능을 포함하고 있다.
시뮬레이터는 지역전리층 알고리즘이 추정한 지역전리층 지도와 IGS IONEX 파일에서 추출한 기준 전리층 지도를 비교하여 지역전리층 추정값의 차이를 우선 추출한다. 이를 기반으로 추정값 차이의 위도별 표준편차, 경도별 표준편차, 격자지점별 표준편차 그리고 시간별 표준편차를 추출할 수 있다. 이와는 별도로 추정된 SDCB와 RDCB를 기준 SDCB와 RDCB와 비교하여 일정 기간 동안의 차이 값의 평균과 표준편차를 구하는 기능도 시뮬레이터에 구현하였다.
각 일자별 추정기 알고리즘의 정상적인 동작상태 확인과 효율적인 디버깅을 위하여, Fig. 7에 도시된 바와 같이 각 DOY별 폴더에 고장 선별기의 잉여값, 상태변수(기저함수 계수, CDCB, 그리고 DCA) 추정치의 수렴 과정, 그리고 출력 주기별 시점별 3차원 지역전리층 지도 등 다양한 그림 파일 출력을 저장한다.
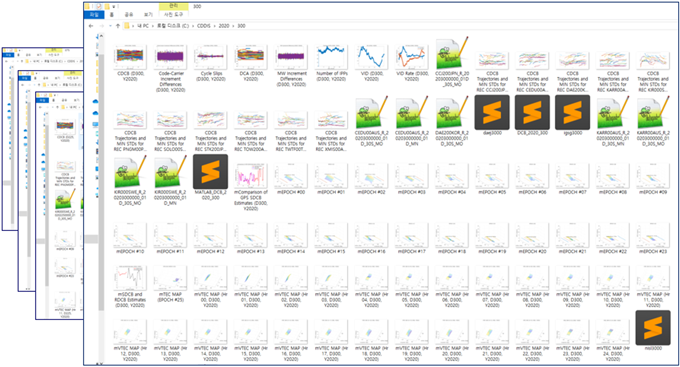
Fig. 7. Snapshot of various simulator-generated image files generated in each folder corresponding to a day of year.
시뮬레이션에 필요한 전지구 영역 주요 상시관측소별 GNSS 측정 정보와 보조 정보는 CDDIS로부터 획득이 가능하다. CDDIS 서버에 접근하게 되면 Hatanaka Compressed RINEX (CRX) 포맷의 파일을 통하여 하루 단위의 GNSS 측정 정보를 내려 받을 수 있다. 동일한 폴더에 정리된 CRX 포맷의 파일은 미리 작성된 프로그램을 통하여 GNSS 데이터 교환에 가장 널리 활용되는 RINEX 포맷의 파일로 일괄 변환이 가능하다.
입력 폴더에 저장된 다양한 형식의 압축 파일을 인식하여 선택된 상시관측소들에 해당하는 압축파일을 풀어서 RINEX 포맷의 텍스트 파일의 형태로 별도로 지정된 작업 폴더에 자동 추출하는 기능을 수행할 수 있다. Fig. 8은 이와 같은 데이터 파일 수집 및 추출 과정을 예시한 것이다.
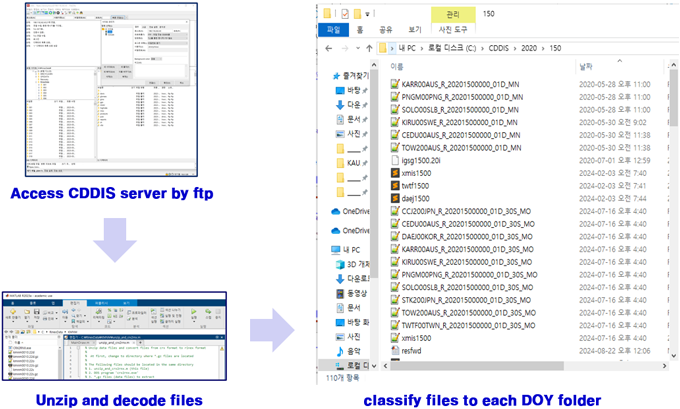
Fig. 8. Procedure to download compressed data files from NASA Crustal Dynamics Data Information System (CDDIS 2025) server and extract text data files from them.
CDDIS에서 제공하는 데이터는 과거에는 RINEX Ver. 2가 주를 이루었다면 근래에는 RINEX Ver. 3 이후의 포맷이 주를 이루고 있다. RINEX Ver. 2에서 RINEX Ver. 3으로 변환하면서 다중위성군에 대한 고려가 추가되었다. RINEX Ver. 3과 최근 시작된 RINEX Ver. 4는 측정 정보에 해당하는 OBS 데이터 관점에서 QZSS L1 C/B 데이터의 정의가 추가된 것 이외에는 크게 다르지 않다. 다양한 RINEX version과 항법메시지를 저장한 방식에 따라 달리 인터페이스를 고려할 필요 있다. 특히 위성 궤도를 포함하는 항법 데이터와 관련해서는 위성군 별로 항법메시지 각각 저장하는 방식(*.GN/RN/EN/JN/CN)과 모든 위성군에 대한 궤도정보를 한 개의 파일에 모두 저장하는 방식(*.MN)으로 분류될 수 있다.
제안된 시뮬레이터는 다양한 Version의 RINEX 항법/관측 데이터를 인식하여 각기 다른 decoding 기능을 수행할 수 있다. 따라서, 한 개의 작업 데이터 폴더에 위성군 별로 다수 파일에 분리된 항법 데이터와 한 개의 파일에 모두 저장된 항법데이터가 혼재하는 경우와, 상시관측소 별로 RINEX Ver. 2와 Ver. 3의 관측데이터가 혼재하는 경우에도 유연하게 지역전리층과 CDCB의 추정 기능을 수행할 수 있는 장점을 가진다.
한 개의 DOY 폴더를 지정하여 1일 동안의 데이터를 후처리용 batch 구조가 아닌 온라인 재귀 구조의 추정기에 적용하게 되면, 초기화 시점 이후에 천이 응답(transient response)에 해당하는 과도기 오차가 발생하게 된다 (Fig. 9의 좌측 하단 그림 참조). 과도기 오차는 추정기의 종류와 우수성에 관계없이 재귀적인 구조의 모든 추정기에서 발생하는 현상이다. 과도기 오차를 감소시키거나 제거하기 위해서는 미리 조사된 정확한 초기값과 상태변수 사이의 상관성까지 상세하게 고려된 공분산 값을 활용하거나, 관심 기간 직전의 준비 기간 데이터를 확보하여 추정기가 준비 기간 데이터 만으로 충분히 천이 구간을 지나 관심 기간에는 정상 상태(steady-state)에 돌입하도록 조정하는 것이 필요하다.
제안된 시뮬레이터는 Fig. 9에 도시된 바와 같이 격리된 하루 폴더와 2일 이상의 연속 폴더를 자동 인식하여 분류 처리할 수 있도록 구현하였다. 격리된 하루 폴더에 대해서는 Fig. 9의 하단 좌측 부분에 도시된 바와 같이 천이 응답 특성인 큰 과도기 오차가 초기에 발생하게 되나, 2일 이상 연속 폴더의 경우에는 관심일(day of interest) 직전일(previous day) 데이터의 마지막 부분을 적용하여 천이 응답 특성을 지나 정상상태에 돌입하게 한 후에 관심일의 데이터를 처리하게 할 수 있다.
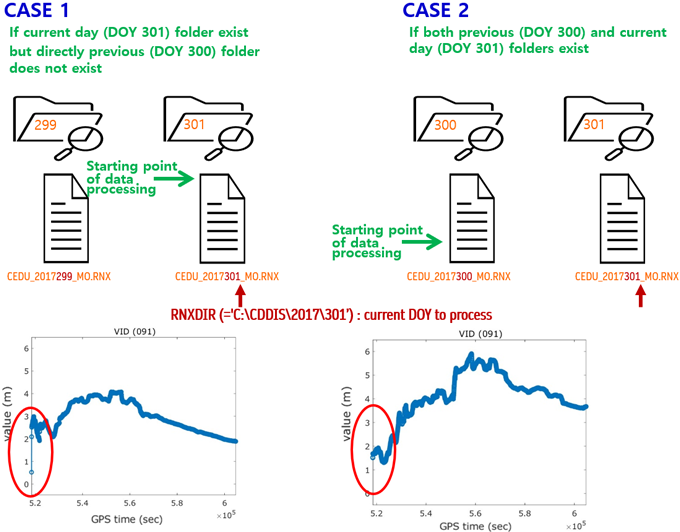
Fig. 9. An example to eliminate unnecessary transient errors of the current day (DOY 301) by pre-processing the observation file of the previous day (DOY 300).
시뮬레이터의 기능을 검증하고 추정기의 성능을 분석하기 위하여 실험을 수행하였다. 실험에 활용된 상시관측소는 기존 연구 (Joo et al. 2022)와의 연계성과 추후 궤도 및 시각동기오차 등 다른 분야로의 확장성을 감안하여 Fig. 10에 도시된 아시아 및 오세아니아 지역에 분포하는 11개 상시관측소이다. 이들은 다음의 세가지 조건들을 참고하여 선정되었다.
– 빈도 높은 실시간 및 저장 데이터의 제공
– 시계 오차 보정을 위한 CLK 데이터 제공
– 지역 위성항법시스템에 대한 관측 데이터 제공
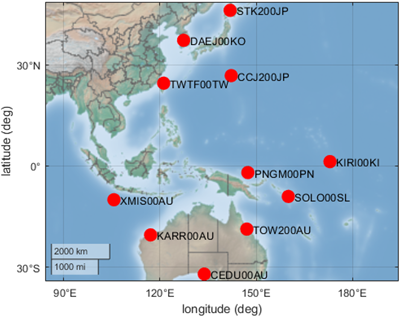
Fig. 10. Locations of Continuously Operating Reference Stations (CORSs) used in the experiment.
실험에는 태양활동 극대기의 초입 기간에 해당하여 전리층 활동의 상태가 과도하게 크거나 작지 않은 2021년 데이터를 활용하였다. 오차의 통계를 위하여 1년 내 10일 간격의 36개 측정 파일을 활용하였다.
지역 전리층 및 DCB 추정기의 성능을 분석하기 위하여 기존 연구에서 상세한 성능 분석을 찾기 어려운 다음의 두 종류 실험을 수행하였다. 첫번째 실험은 GPS와 QZSS를 동시에 활용한 경우와 QZSS만을 단독으로 활용한 경우의 지역 전리층 지도의 추정 성능을 비교하기 위한 것이고, 두번째 실험은 전역 및 지역 위성항법시스템의 신호를 모두 활용하여 추정한 SDCB의 정확도를 IGS 기준 정보와 비교하고, 지역 위성항법시스템의 신호만을 수신하여도 전리층 계수와 DCB를 명확하게 분리할 수 있는지를 확인하기 위한 것이다.
전역 및 지역 위성항법시스템 신호를 동시에 수신하는 경우와 지역 위성항법시스템 신호만을 수신한 경우의 지역전리층 추정 성능을 비교 평가하기 위하여 시뮬레이터를 활용한 실험을 수행하였다. 전역 및 지역 위성항법시스템인 GPS와 QZSS를 모두 활용하는 경우와 지역 위성항법시스템인 QZSS만을 단독으로 활용하는 경우의 IPP 분포들은 Fig. 11에 도시되어 있다. Fig. 11에 도시된 바와 같이 두 위성군을 모두 활용하는 경우와 지역 위성군을 단독으로 사용하는 경우 모두 IPP들이 다수의 그룹으로 군집하여 분포함을 확인할 수 있다. 반면, 두 위성군을 모두 활용하는 경우가 지역위성군을 단독으로 활용하는 경우에 비하여 몇 배 더 많은 IPP들을 수반하는 것을 알 수 있다. 하루 기간 중 매 시점에 두 위성군을 모두 활용하는 경우와 지역위성군을 단독으로 활용하는 경우의 가시위성 수는 Figs. 12a와 12b에 비교 도시된 바와 같이 전반적으로 3배 내외가 됨을 알 수 있다.
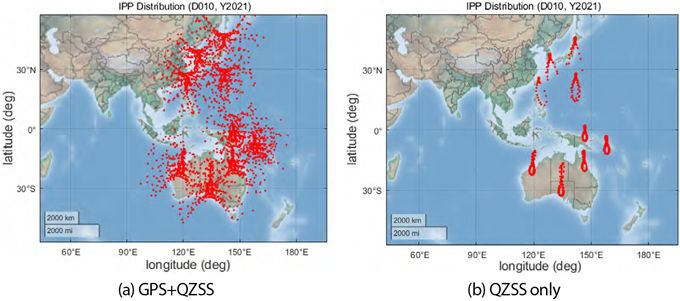
Fig. 11. Comparison of Ionospheric Pierce Point (IPP) distributions at DOY 010 of 2021.
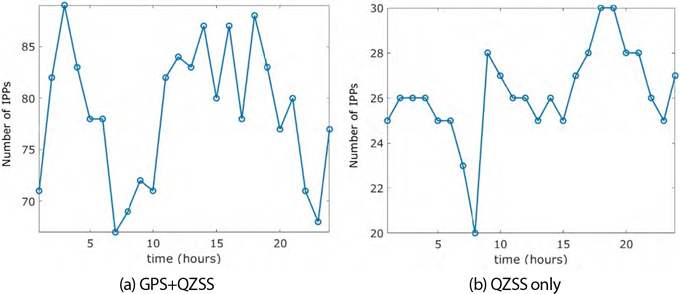
Fig. 12. Comparison of number of Ionospheric Pierce Points (IPPs) at DOY 010 of 2021.
IPP 군집 그룹의 수를 고려하여 공간기저함수의 계수가 9개 이내가 되도록 위도 차분에 대하여 최대 2차 함수로 경도 차분에 대해서 최대 2차 함수로 모델링하여 하루(DOY 010) 동안의 관측데이터를 추정기에 입력하였을 때 산출된 수직 전리층 추정치의 변화 개형은 Fig. 13에 도시되어 있다. Fig. 13a는 두 위성군을 모두 활용하는 경우의 결과를 나타내며 Fig. 13b는 지역 위성항법시스템만을 단독으로 활용하는 경우의 결과를 각각 나타낸다. 두 결과를 비교해 보면 수직 전리층 추정치의 변화 개형은 두 위성군을 모두 활용하는 경우와 한 개의 지역위성군을 단독으로 활용하는 경우에 대하여 크게 차이가 없음을 확인할 수 있다. 이는 추정기의 상태변수가 상시관측소 개수보다 많지 않음으로써, 측정치를 누적할 경우에 기저함수 계수에 대한 가관측성이 문제없이 확보된 결과로 분석된다.
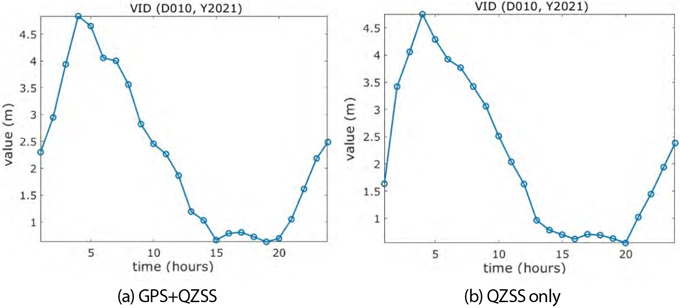
Fig. 13. Comparison of Vertical Ionospheric Delay (VID) estimates at DOY 010 of 2021.
CDDIS에서 제공하는 하루 단위의 측정 파일은 전역 및 지역 위성항법시스템에 대한 다중 주파수 의사거리와 위상 측정치를 30초 간격으로 제공하고 있다. 따라서, 전리층 추정기를 30초 간격으로 측정 갱신하고 성능 분석을 위하여 추정기의 출력을 1분 간격으로 IONEX 포맷으로 저장하고 IGS 기준 데이터와 비교하게 되면 각각의 위경도 격자 지점에는 60분×24시간×36일 = 51,840개의 비교 데이터가 쌓이게 된다.
제안된 추정기는 추정된 함수 계수를 활용하여 위도 및 경도 방향으로 임의의 해상도로 조절하여 IONEX 파일을 산출할 수 있다. 본 실험을 위해서는 유효한 IPP 분포 지역을 고려하여 위도는 -50도에서 50도까지 2.5도 간격으로 경도는 110도에서 170도까지 5도 간격으로 분리하여 총 480개의 격자 지점(Ionospheric Grid Point; IGP)에 대하여 IONEX 파일을 생성하였다.
위에서 설명된 과정을 통하여 위경도 영역의 각 격자 지점별로 다른 방법으로 산출된 추정치 차이 값의 평균과 표준편차는 Figs. 14와 15에 각각 도시되어 있다. Figs. 14a와 15a는 두 위성군을 모두 활용한 결과를 나타내며, Figs. 14b와 15b는 지역위성군을 단독으로 활용한 결과를 나타낸다. 위도와 경도에 관계없이 추정치 차이 값 모두에 대하여 산출한 평균과 표준편차는 Table 1에 정리하였다. Figs. 14와 15, 그리고 Table 1에 도시된 결과들을 해석하면, 1년 기간 동안에 위도 경도 이내의 범위에서 두 위성군을 모두 사용한 결과와 지역위성군을 단독으로 사용하여 산출한 수직 전리층 추정치의 정확도는 총 표준편차 관점에서 0.80 m에서 2.73 m로 증가해 3~4배 정도 오차가 커질 수 있음을 확인하였다.
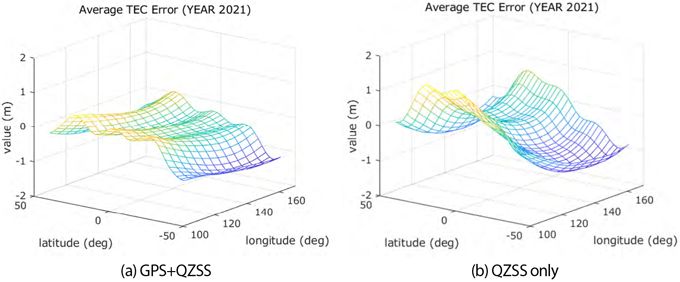
Fig. 14. Comparison of average Vertical Ionospheric Delay (VID) differences at each grid point for 36 different days of 2021 separated by 10 days.
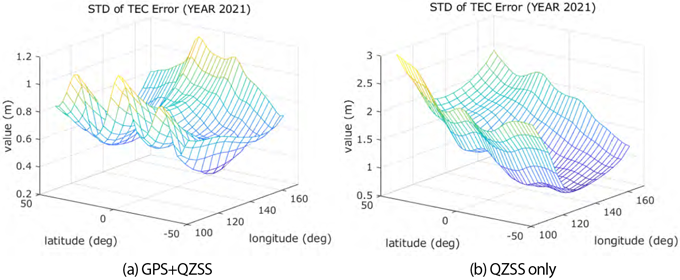
Fig. 15. Comparison of standard deviations of Vertical Ionospheric Delay (VID) differences at each grid point for 36 different days of 2021 separated by 10 days.
Table 1. Comparison of total error statistics counting all the epochs and the Ionospheric Grid Points (IGPs) referencing IGS Global Ionospheric map (GIM).
| GPS+QZSS | QZSS only | |
|---|---|---|
| Total average error (m) | 0.5001 | 0.3541 |
| Total standard deviation (m) | 0.8070 | 2.7330 |
GPS와 QZSS에 포함된 모든 위성의 측정치를 입력으로 활용하여 산출한 CDCB와 DCA의 추정치는 Figs. 16과 17에 각각 도시되어 있다. 두 그림은 모두 2021년 3월 31일 (DOY 090) 하루 동안의 결과에 해당된다.
Figs. 16과 17 모두에서 확인할 수 있듯이 각각 상수 값의 특성을 가지는 CDCB와 DCA는 해당되는 상태변수가 정상상태로 진입하면서 일정한 값에 적절하게 수렴하는 것을 확인할 수 있다. 또한, 코드 측정치에 기반한 CDCB 추정치가 위상 측정치에 기반한 DCA 추정치에 비하여 천이 응답 구간에서의 변화량이나 정상 상태에서 수렴 값을 기준으로 한 변화량이 상대적으로 더 큰 특성을 확인할 수 있다.
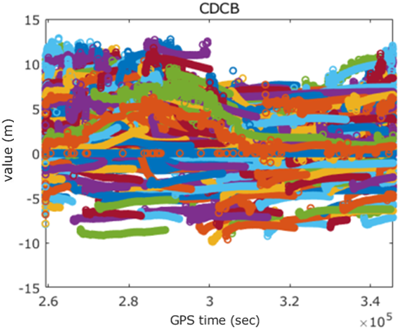
Fig. 16. Trajectories of Combined Differential Code Bias (CDCB) estimates during DOY 090 of 2021 by combined GPS and QZSS observations.
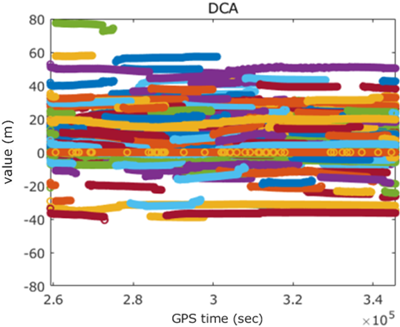
Fig. 17. Trajectories of Differential Cycle Ambiguity (DCA) estimates during DOY 090 of 2021 by combined GPS and QZSS observations.
Fig. 18은 DOY 090에 제안된 추정기에 의하여 최종적으로 산출된 SDCB를 각기 다른 방법에 의하여 산출된 기준 값들과 비교한 것이다. 그림에서 x-축은 위성과 수신기의 인덱스를 나타내며 1에서 32까지는 GPS 위성을, 33에서 39까지는 QZSS 위성을, 그리고 40부터 50까지는 각기 다른 상시관측소 수신기를 각각 나타낸다. Fig. 18에 도시된 바와 같이 제안된 방법에 의해 추정된 DCB는 일반적으로 DCB 관련 연구에서 기준으로 많이 활용되는 IGS 산출 DCB와 비슷한 경향을 가지는 것으로 확인되므로 제안된 추정기는 적절하게 설계된 것으로 판단된다. 또한 방송궤도력에 포함된 군지연(group delay) Tgd 값들과 비교했을 때에도 평균값의 차이를 제외하면 비슷한 경향을 보임을 알 수 있다.
Fig. 18에 도시된 바와 같이 GPS는 노후화에 따른 교체에 의하여 다양한 모델이 존재하므로 비교적 최근에 발사된 QZSS보다 SDCB 값들이 다양하게 존재하는 것을 볼 수 있으며, RDCB는 전체적으로 SDCB 보다 넓은 영역에 분포하는 것을 볼 수 있다. 이는 소자의 규격과 비용의 관점에서 수신기에 탑재된 회로와 위성에 탑재된 회로가 차별화되는데 기인한 것으로 분석된다.
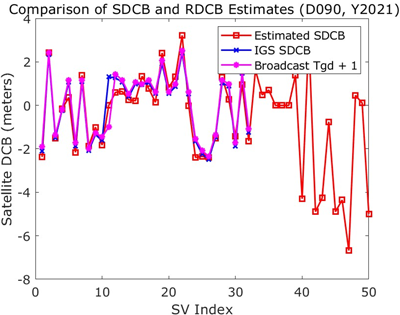
Fig. 18. Comparison of Satellite Differential Code Bias (SDCB) estimates from the proposed estimator, IGS IONEX file, and the shifted group delays contained in the broadcast ephemeris by GPS.
2021년 3월 31일 (DOY 090)의 특기할 만한 사항은 해당 일에 실험에 사용된 감시국들이 측정한 관측 데이터에서 GPS PRN 11번 위성에 대한 적절한 측정값이 발견되지 않은 점이다. 이와 같은 특기 사항은 해당 일의 관측데이터들을 개별적으로 검사한 결과 확인되었다. 이의 결과로서 제안된 추정기는 11번 위성의 DCB를 산출하지 않고 영 값(zero value)으로 처리하였다.
또한, Fig. 18에 도시된 바와 같이 RINEX 항법데이터에 저장된 방송궤도력 내의 Tgd 값의 경우에도 11번 위성에 대한 값이 영 값으로 저장되어 있다. 이는 해당 위성이 관측되지 않거나 해당 위성의 궤도력이 방송되었지만 Tgd 값이 영 값으로 방송된 경우에 해당한다.
참고로 Fig. 19는 미국 해안경비대 항법센터의 홈페이지에 2021년 7월 21일에 게시된 problem report 화면을 나타낸다 (Navigation Center 2023). 그림에 나타난 바와 같이 PRN 11번 위성의 상태가 전반적으로 건전하지 않은(unhealthy) 것으로 안내되어 있다.
반면, IGS 산출 IONEX 파일에서는 GPS PRN 11번 위성에 대한 DCB 값이 산출되어 있는 것으로 확인되었다. 이와 같은 결과의 의미는, 제안된 방법이 활용한 11개의 상시관측소는 11번 위성의 신호를 수신하지 못했지만 IGS가 활용하는 전지구 영역에 분포한 감시국들 중 일부가 11번 위성의 신호를 수신한 것으로 해석될 수 있다.
앞서 설명된 DCB 관련 실험 결과의 전반적인 사항을 고려할 때, 제안된 추정기는 외부 기관에 의존하지 않고 추정 단계에서 문제가 있는 위성의 DCB를 효과적으로 식별하여 분리하고 있음을 알 수 있다.
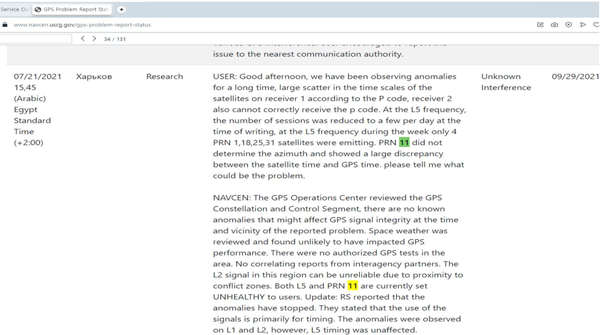
Fig. 19. GPS problem report regarding PRN 11 announced by Navigation Center, US Coast Guard (Navigation Center 2023).
Figs. 20과 21은 GPS와 QZSS를 모두 활용한 경우에 제안된 추정기와 IGS 기준 데이터가 각각 산출한 GPS SDCB의 추정치 차이 값의 평균과 표준편차를 나타낸다. 2021년 IGS가 산출한 IONEX에는 QZSS 위성의 DCB가 포함되어 있지 않으므로 통계 분석 결과를 도시하지 않았다. SDCB의 경우에는 하루에 한 번씩 두 추정치를 비교하므로 Figs. 20과 21은 각각 1년 내 10일 간격으로 활용된 36개(36일)의 데이터에 대한 차이 값의 평균과 표준편차에 해당된다. 두 그림에 도시된 바와 같이 GPS와 QZSS를 모두 활용한 경우에 제안된 방법과 IGS가 산출한 SDCB 차이 값의 평균과 표준편차는 전반적으로 1 m 이내에 존재함을 확인할 수 있다.
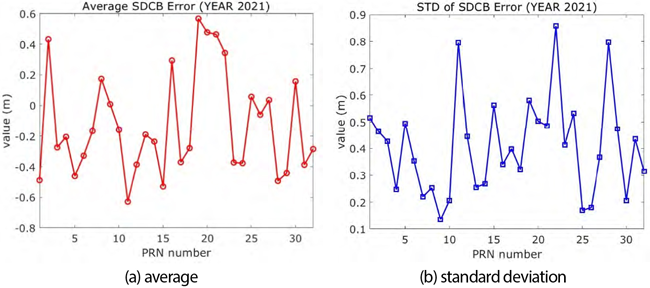
Fig. 20. Statistics of the Satellite Differential Code Bias (SDCB) estimate differences between the proposed method and the IGS IONEX for 36 different days of 2021 separated by 10 days.
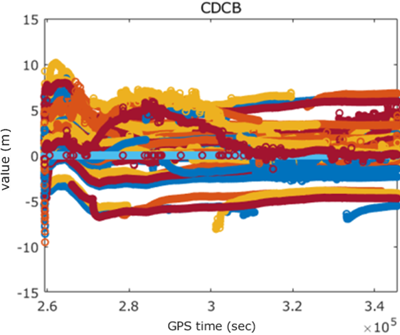
Fig. 21. Trajectories of Combined Differential Code Bias (CDCB) estimates during DOY 090 of 2021 by single constellation QZSS observations.
GPS와 QZSS를 동시에 활용한 앞선 결과들에 대비하여 QZSS만을 단독으로 활용한 결과는 Figs. 21-24에 도시되어 있다. Figs. 21과 22에 도시된 바와 같이 각각 상수 값의 특성을 가지는 혼합 DCB와 DCA는 QZSS만을 단독으로 활용하여도 정상상태로 진입하면서 일정한 값에 적절하게 수렴하는 것을 확인할 수 있다. 반면 그림에 도시된 궤적의 가닥수가 상대적으로 작은 것을 알 수 있는데 이는 CDCB와 DCA에 해당되는 상태변수의 개수가 위성과 수신기의 개수의 곱에 해당되기 때문이다.
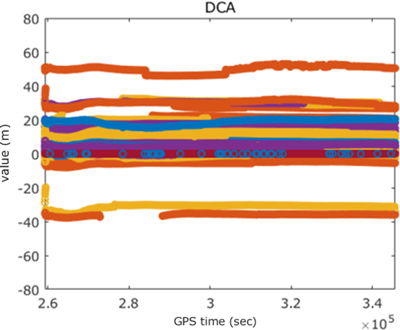
Fig. 22. Trajectories of Differential Cycle Ambiguity (DCA) estimates during DOY 090 of 2021 by single constellation QZSS observations.
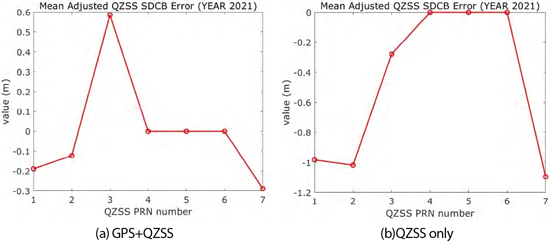
Fig. 23. Comparison of Satellite Differential Code Bias (SDCB) estimate differences between the proposed estimator and the shifted group delays contained in the broadcast ephemeris by QZSS for 36 different days of 2021 separated by 10 days (adjusting mean value: 0.7423).
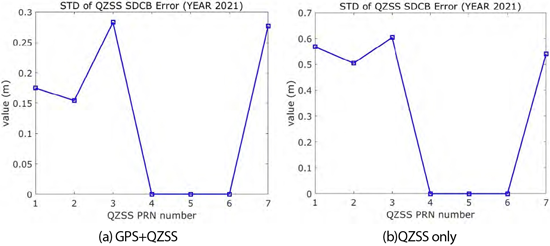
Fig. 24. Comparison of standard deviations of Satellite Differential Code Bias (SDCB) estimate differences between the proposed estimator and the shifted group delays contained in the broadcast ephemeris by QZSS for 36 different days of 2021 separated by 10 days.
SDCB 추정치의 정밀도 분석을 위해서는 바이어스의 모호성에 대한 기준을 정할 필요가 있다. 이를 위하여, (i) GPS SDCB의 합을 영 값으로 한 제약사항을 적용하고 GPS와 QZSS 측정치를 모두 활용하여 QZSS SDCB의 추정값을 산출하고, (ii) QZSS 방송 Tgd를 앞서 산출된 QZSS SDCB와의 평균 차이 값이 영 값이 되도록 바이어스 값을 구하여 적용한 변환 QZSS Tgd를 분석의 기준값으로 활용하였다. 앞선 경우와는 달리 비교 대상이 되는 기준 값이 다양하지 않은 이유는 방송궤도력을 제외하고 QZSS만을 단독으로 활용한 DCB는 기존 자료에서 찾기 어렵기 때문이다. 실험 전 구간에 걸쳐서 QZSS 4, 5, 6번 위성은 가용하지 않으므로 모두 영 값으로 처리하였다.
Figs. 23과 24는 제안된 방법에 의하여 분리 추정된 QZSS SDCB와 앞서 설명된 절차에 의하여 산출한 변환 QZSS Tgd 값을 비교한 평균과 표준편차를 각각 비교한 것이다. Figs. 23a와 24a는 GPS와 QZSS 측정치를 모두 활용하는 경우에 해당되며, Figs. 23b와 24b는 QZSS 측정치만을 단독으로 활용하는 경우에 해당된다. 두 그림에 도시된 바와 같이 QZSS SDCB를 추정하고자 할 경우, GPS와 QZSS를 모두 활용한 결과에 비해서 QZSS만을 단독으로 활용할 경우에 평균오차와 표준편차 모두 분포범위가 커지므로 QZSS SDCB 추정치의 정밀도가 눈에 띄게 열화됨을 확인할 수 있다. 그러나, 관측성 제약에 따른 평균오차를 제외하면 표준편차 0.6 m의 정밀도로 추정된 SDCB가 방송궤도력에 포함된 군지연값들과 정합되는 것으로 분석되었다.
본 논문에서는 RINEX와 IONEX 포맷의 파일들에 기반한 효율적인 지역전리층/DCB 시뮬레이터를 제안하였다. 제안된 시뮬레이터는 방송궤도력과 RINEX 관측 파일들을 입력으로 활용하여 지역 전리층과 및 DCB를 분리 추정할 수 있는 재귀적인 추정기를 포함하고 있으며, 추정기가 산출한 IONEX 파일을 IGS가 산출한 IONEX 파일과 비교하여 분리 추정된 지역전리층과 DCB의 정확도 및 정밀도를 편리하게 분석할 수 있는 장점을 가진다. 제안된 시뮬레이터를 활용하여 단일 지역 위성항법군과 국소 지역에 분포한 상시관측소를 활용할 경우 지역전리층과 DCB의 분리 추정이 어느 정도 가능한지 두 실험을 통하여 평가하였다.
실험의 결과에 의하면, 아시아 및 오세아니아 국소 지역에 분포한 11개의 기준국에서 지역 위성항법시스템에 대한 측정정보만을 수신하면 일부 전리층 통과 지점에서의 기울기 계수가 고정된 경우에도 지역 전리층과 DCB를 분리 추정할 수 있으며, 그 정확도는 IGS IONEX에 대비하여 수직 전리층 평균오차 0.35 m 및 표준편차 2.73 m 내외의 차이를 보임을 확인하였다.
SDCB의 경우에는 전역 및 지역 항법위성의 신호를 모두 수신하여 처리할 경우에는 GPS 위성들의 경우에는 IGS IONEX 결과에 대비하여 표준편차 0.9 m 이내의 평균적인 차이를 가짐을 확인하였으며, 한정된 단일 지역 위성항법군에 소속된 4개의 위성만을 활용할 경우에는 가관측성 제약에 따른 평균오차를 제외하면 SDCB는 표준편차 0.6 m의 정밀도로 방송궤도력(broadcast ephemeris)에 포함된 군지연 값들과 정합되는 것으로 분석되었다.
본 연구를 보완하기 위하여 향후에는 다수의 후보 공간기저함수와 적용 가능한 상시관측소의 조합을 변화시키며 비교 분석하여 추정기의 성능과 상시관측소의 개수와 장소를 최적화하는 연구가 필요할 것으로 예상된다. 또한, 지역 위성항법시스템만을 활용할 경우에도 효율적으로 SDCB와 RDCB를 분리할 수 있는 제약식에 대한 연구도 추가적으로 필요하리라 예상된다.
Methodology, H. K. Lee; software, H. K. Lee; data curation, J. Kim, K.-D. Park, B.-K. Choi; review, J. Hong, D.-H. Sohn, and J.-K. Chung; project administration, J. Hong, D.-H. Sohn, and J.-K. Chung, B.-K. Choi; funding acquisition, B.-K. Choi.
The authors declare no conflict of interest.
Cabinet Office. 2024. Quasi-Zenith Satellite System Interface Specification Satellite Positioning, Navigation and Timing Service (IS-QZSS-PNT-006). https://qzss.go.jp/en/technical/download/pdf/ps-is-qzss/is-qzss-pnt-006.pdf?t=1755158607415
Cabinet Office. 2025a. Quasi-Zenith Satellite System Interface Specification Sub-meter Level Augmentation Service (IS-QZSS-L1S-008). https://qzss.go.jp/en/technical/download/pdf/ps-is-qzss/is-qzss-l1s-008.pdf?t=1755158432425
Cabinet Office. 2025b. Quasi-Zenith Satellite System Interface Specification Centimeter Level Augmentation Service (IS-QZSS-L6-007). https://qzss.go.jp/en/technical/download/pdf/ps-is-qzss/is-qzss-l6-007.pdf?t=1755158645865
Coco, D. S., Coker, C., Dahlke, S. R., & Clynch, J. R. 1991. Variability of GPS satellite differential group delay biases. IEEE Transactions on Aerospace and Electronic Systems, 27, 931–938. https://doi.org/10.1109/7.104264
Choi, B.-K., Sohn, D.-H., Hong, J., & Chung, J.-K. 2024. Regional Ionosphere Modeling using GPS, Galileo, and QZSS. JPNT, 13, 159–165. https://doi.org/10.11003/JPNT.2024.13.2.159
Choi, K. H., Lee, J. Y., Kim, H. S., Kim, J., & Lee, H. K. 2012. Simultaneous estimation of ionospheric delays and receiver differential code bias by a single GPS station. Meas. Sci. Technol., 23, Article #065002. https://doi.org/10.1088/0957-0233/23/6/065002
Choi, K. H., Lim, J. H., Yoo, W. J., & Lee, H. K. 2018. Distributed processing of a GPS receiver network for a regional ionosphere map. Measurement Science and Technology, 29, Article #015104. https://doi.org/10.1088/1361-6501/aa89cc
Crustal Dynamics Data Information System [Internet], cited 2025 Aug 1, available from: https://www.earthdata.nasa.gov/centers/cddis-daac
Hatch, R. 1983. The synergism of GPS code and carrier measurements. International geodetic symposium on satellite doppler positioning, Las Cruces, NM, February 8–12, 1982, vol. 2, pp. 1213–1231. https://ui.adsabs.harvard.edu/abs/1983igss.conf.1213H
Hernández-Pajares, M., Juan, J. M., Sanz, J., Orús, R., Garcia-Rigo, A., et al. 2009. The IGS VTEC maps: a reliable source of ionospheric information since 1998. J. Geod., 83, 263–275. https://doi.org/10.1007/s00190-008-0266-1
International GNSS Service, Ionospheric Products [Internet], cited 2025 Aug 1, available from: https://igs.org/products/#ionosphere
Jin, R., Jin, S., & Feng, G. 2012. M_DCB: Matlab Code for Estimating GNSS Satellite and Receiver Differential Code Biases. GPS Solutions, 16, 541–548. https://doi.org/10.1007/s10291-012-0279-3
Joo, J. M., et al. 2022. Fundamental Research for Korea Satellite Navigation System and Future Air Traffic Management. Korea Aerospace Research Institute.
Li, Z., Wang, N., Hernández-Pajares, M., Yuan, Y., Krankowski, A., et al. 2020. IGS real-time service for global ionospheric total electron content modeling. J. Geod, 94, 32. https://doi.org/10.1007/s00190-020-01360-0
Natras, R., Goss, A., Halilovic, D., Magnet, N., Mulic, M., et al. 2023. Regional Ionosphere Delay Models Based on CORS Data and Machine Learning. NAVIGATION: Journal of the Institute of Navigation, 70, navi.577. https://doi.org/10.33012/navi.577
Navigation Center, US Coast Guard [Internet], cited 2023 Dec 21, available from: https://www.navcen.uscg.gov/gps-problem-report-status
Schaer, S., Gurtner, W., & Feltens, J. 1998. IONEX: The Ionosphere Map Exchange Format Version 1. Proceedings of the IGS AC Workshop, Darmstadt, Germany.
Xiang, Y., Xu, Z., Gao, Y., & Yu, W. 2020. Understanding long-term variations in GPS differential code biases. GPS Solutions, 24, 118. https://doi.org/10.1007/s10291-020-01034-6
Ya’acob, N., Ismail, M., & Abdullah, M. 2007. Investigation of the GPS signals ionospheric correction: Ionospheric TEC prediction over equatorial. IEEE International Conference on Telecommunications and Malaysia International Conference on Communications, 294–298. https://doi.org/10.1109/ICTMICC.2007.4448646
Zhou, C., Yang, L., Li, B., & Balz, T. 2023. M_GIM: a MATLAB-based software for multi-system global and regional ionospheric modeling. GPS Solutions, 27, 42. https://doi.org/10.1007/s10291-022-01370-9