Min-Gyu Park1![]() , Kyoung-Min Roh2†
, Kyoung-Min Roh2†![]() , Eunseo Park2
, Eunseo Park2![]()
1Department of Astronomy and Space Science, Chungnam National University, Daejeon 34134, South Korea
2Space Navigation and Geodesy Center, Korea Astronomy and Space Science Institute, Daejeon 34055, South Korea
†Corresponding Author: Kyoung-Min Roh, E-mail: kmroh@kasi.re.kr
Citation: Park, M.-G., Roh, K.-M., & Park, E. 2026, Performance Verification of QZSS Reduced Almanac, Journal of Positioning, Navigation, and Timing, 15, 13-23.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2026 March, Volume 15, Issue 1, pages 13-23. https://doi.org/10.11003/JPNT.2026.15.1.13
Received on Nov 21, 2025, Revised on Dec 15, 2025, Accepted on Dec 22, 2025, Published on Mar 15, 2026.
Copyright © The Institute of Positioning, Navigation, and Timing
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
The Quasi-Zenith Satellite System (QZSS) Civil Navigation (CNAV) message provides two almanac types, Midi and Reduced, to aid satellite signal acquisition. An Interface Control Document (ICD) defines operational parameters for both, including the reference time (toa) update interval and message transmission intervals. It also specifies three-dimensional position accuracy for the Midi almanac to ≤10 km (1σ). However, the position accuracy of the parameter-simplified Reduced almanac remains unspecified in the ICD. Therefore, verification using real broadcast data is necessary to confirm whether the operational characteristics defined in the ICD for both almanacs, such as the toa interval – specifically for the Reduced almanac messages – are consistently maintained. This study addresses these points through an experimental analysis using received QZSS CNAV L2C signal data. The primary objectives were to evaluate the operational specifications using QZSS CNAV data collected from experiments, in comparison with the ICD, and to quantify the position accuracy of the Reduced almanac, which is not specified in the ICD. To this end, we first analyzed the actual update interval of the toa shared by both almanacs and the reception intervals of Message Types 12 and 31 (containing the Reduced almanac). Subsequently, we evaluated the position accuracy derived from the Reduced almanac through comparison with precise orbits and by identifying error sources. The analysis showed that the update interval for the shared toa varied between 0.25 and 1.75 days, deviating from the one-day period defined in the ICD. The reception intervals for Message Types 12 and 31, which are typically 288 seconds, occasionally exceeded the 1200 second maximum defined in the ICD. The accuracy assessment confirmed the Midi almanac meets its specification, whereas the Reduced almanac exhibited position errors of several thousand kilometers, stemming from its use of fixed constants for dynamic orbital parameters. These findings provide an empirical evaluation of the QZSS almanacs’ actual operational characteristics and the Reduced almanac’s accuracy limitations. This information can serve as a reference for future almanac parameter design for a geosynchronized orbit used for regional navigation systems such as the Korean Positioning System (KPS).
QZSS, almanac, Midi almanac, Reduced almanac, CNAV
위성항법시스템(Global Navigation Satellite System, GNSS)은 위성 신호를 통해 사용자의 위치를 계산하는 핵심적인 측위 시스템으로, 미국의 Global Positioning System (GPS), 러시아의 Globalnaya Navigatsionnaya Sputnikovaya Sistema (GLONASS), 중국의 BeiDou Navigation System (BDS) 등이 대표적이다 (Kim et al. 2024). 전지구적인 항법서비스를 제공하는 이들과 달리 일본의 Quasi-Zenith Satellite System (QZSS)는 GPS와의 호환성을 바탕으로 동아시아 지역을 서비스 대상으로 하는 지역위성항법시스템(Regional Navigation Satellite System)으로 해당 지역에 측위 정확도와 가용성을 높이는 데 중요한 역할을 한다. QZSS 위성은 항법메시지를 통해 방송궤도력(broadcast ephemeris), 시각 및 전리층 보정 정보, 그리고 알마낙(almanac)을 사용자에게 송신한다 (IS-QZSS-PNT-006 2024). 이 중 알마낙은 위성의 대략적인 궤도 및 시각 정보를 방송궤도력보다 낮은 정밀도로 제공한다 (PS-QZSS-03 2022).
GNSS 수신기는 유효한 궤도 및 시각 정보가 없는 상태에서 가시권에 있는 위성을 특정할 수 없어 광범위한 영역 탐색이 불가피하다. 이때 위치정보가 없는 위성과의 거리에 따른 신호 도착 시간(code delay)과 위성의 고속 이동에 따른 주파수 변화량(doppler shift)을 모두 확인해야 하므로, 위성의 최초 위치 추정까지 상당한 시간을 소요한다. 알마낙은 전체 위성군의 대략적인 궤도 정보, 위성 상태, 시각 보정 변수 등을 제공하기 때문에 수신기가 유효한 알마낙을 보유한 상태라면 특정 시간과 대략적인 위치에서 관측 가능한 위성 후보군을 효과적으로 예측하여 신호 탐색 범위를 크게 좁힐 수 있다. 결과적으로 알마낙은 최초 위치결정시간인 Time to First Fix (TTFF)을 단축시킬 수 있다 (Misra & Enge 2006, Lee et al. 2024).
QZSS는 현대화된 항법메시지인 Civil Navigation (CNAV)을 통해 두 종류의 알마낙을 제공한다 (Kim et al. 2024). 하나는 기존 QZSS Legacy Navigation (LNAV) 형식의 알마낙과 동일한 11개의 궤도 요소로 구성된 Midi 알마낙이며, 다른 하나는 5개의 궤도 요소로 구성된 Reduced 알마낙이다 (IS-QZSS-PNT-006 2024). 이처럼 Reduced 알마낙은 위성당 제공하는 궤도 정보량이 상대적으로 매우 적기 때문에 전체 위성의 위치를 Midi 알마낙보다 빠르게 전송할 수 있는 이점이 있지만, 제공 정보가 축소된 만큼 위성 위치 추정의 정확도는 상대적으로 낮아질 수 있다 (Lee et al. 2025). 특히, CNAV와 LNAV의 알마낙은 중궤도(Medium Earth Orbit, MEO)를 사용하는 GPS를 대상으로 개발되어 고도 36,000 km의 정지궤도(Geostationary Earth Orbit, GEO)와 지구동기경사궤도(Inclined Geosynchronized Orbit, IGSO)에 최적화된 형식이 아니기 때문에 GPS와는 다른 수준의 궤도 정확도를 가진다 (Xiaogang & Mingquan 2017).
Midi 알마낙의 궤도 요소 산출 기준시각은 Almanac reference week ($WN_{a-n}$)와 Almanac reference time of week ($t_{oa}$)의 조합으로 정의된다. QZSS ICD (IS-QZSS-PNT-006 2024)에 따르면 기준시각 갱신 주기는 24시간, Midi 알마낙 메시지의 송신 주기는 288초다. Midi 알마낙이 제공하는 위성의 위치 정확도는 QZSS Performance Standard (PS-QZSS-03 2022)에 10 km ($3D-1\sigma$) 이내로 제시하고 있다. Reduced 알마낙 역시 기준시각 갱신 주기와 메시지 타입의 수신 주기는 정의되어 있지만, 위치 정확도에 대해서는 명확히 규정된 바가 없어, 실제 운용 환경에서의 성능 수준을 검증할 필요성이 제기된다. 또한, 문서에 명시된 운용 주기들이 실제 위성 신호에서도 일관되게 유지되는지에 대한 확인 역시 중요하다. Lee et al. (2025)는 GPS의 Midi 알마낙과 Reduced 알마낙의 성능 분석을 수행하여, 각각의 오차 수준이 수 km, 수백 km수준임을 확인하였다. 다만, 위 연구는 QZSS와 같은 정지궤도가 아닌 중궤도에 국한되었고, 특히, Reduced 알마낙의 경우 실제 데이터가 아닌 Midi 알마낙 자료를 가공한 자료를 활용하였다. Kim et al. (2024)는 각 위성시스템별로 CNAV 데이터의 방송 주기와 시퀀스에 대한 실측 자료 기반 분석을 수행하였지만, 앞서 언급한 실제 알마낙 자료의 생성 주기와 성능에 대한 분석은 다루지 않았다.
본 연구는 QZSS에서 송신하는 실제 위성 신호를 수신하여 다음 두 가지 목표를 달성하고자 한다. 첫째, QZSS ICD (IS-QZSS-PNT-006 2024)에 명시된 Midi 및 Reduced 알마낙의 $t_{oa}$의 생성 주기와 메시지 수신 주기가 실제 운용 환경에서도 일치하는지를 실측 데이터를 통해 검증하는 것이다. 또한, QZSS Performance Standard (PS-QZSS-03 2022)에 명시되지 않은 Reduced 알마낙이 제공하는 위성의 위치 정확도를 정량적으로 산출하고, Midi 알마낙과의 비교를 통해 그 오차의 원인을 규명하는 것이다. 실측 데이터를 통한 QZSS 알마낙의 실제 운용 현황을 파악하고 Reduced 알마낙의 정량적 성능을 분석함으로써 QZSS와 유사한 궤도를 이용하는 지역위성항법시스템인 한국형 위성항법시스템(KPS)의 알마낙 설계에 참고 자료로 활용될 수 있다.
본 논문은 다음과 같이 구성된다. 2장에서는 Midi 및 Reduced 알마낙을 획득하고 위성 좌표를 산출하는 과정과 위성 신호 분석 절차를 설명한다. 3장에서는 $t_{oa}$ 및 메시지 수신 주기와 Reduced 알마낙 궤도 요소에 대한 분석 결과를 제시하고, QZSS 아카이브 (Cabinet Office 2025)에 공개된 정밀궤도력(precise ephemeris)과의 비교를 통해 두 알마낙 기반 위치 정확도를 종합적으로 분석한다. 마지막으로 4장에서는 본 연구의 결과를 정리하였다.
Midi 알마낙은 QZSS가 제공하는 두 종류의 알마낙 중 하나로, 항법 해를 구하는데 사용하는 방송궤도력보다 축소된 요소를 통해 궤도 정보를 제공한다. 이 알마낙의 구조와 요소는 Quasi-Zenith Satellite System (QZSS) ICD (IS-QZSS-PNT-006 2024)에 정의되어 있으며, 기존의 LNAV 알마낙과 동일한 요소로 구성된다 (Lee et al. 2025). Midi 알마낙은 CNAV L2C 메시지 타입 37과 CNAV2 L1C 서브프레임 3 페이지 4를 통해 위성에서 직접 사용자에게 전송된다 (IS-QZSS-PNT-006 2024). 또한, QZSS 아카이브 (Cabinet Office 2025)에서는 Midi 알마낙을 제공받을 수 있으며 본 연구에서는 QZSS CNAV L2C에서 직접 얻은 데이터와 QZSS 아카이브에서 제공하는 공개 자료를 모두 분석에 활용하였다.
Table 1은 Midi 알마낙의 요소와 그 정의를 정리한 것으로 위성의 기본적인 궤도 요소와 그 기준 시각 정보로 구성된다. 사용자는 이 궤도 요소들을 Table 2의 알고리즘에 적용하여 특정 시점의 Earth Centered Earth Fixed (ECEF) 좌표계 상의 위성 위치를 계산할 수 있다. Midi 알마낙은 방송궤도력에 비해 정확도는 낮지만, 위성의 대략적인 궤도 정보를 제공하여 수신기가 빠르고 효율적으로 위성을 찾는 데 충분한 정확도를 제공하도록 설계된 데이터 형식이라 할 수 있다 (IS-QZSS-PNT-006 2024, Lee et al. 2025).
Table 1. Midi Almanac parameters defined in QZSS ICD (IS-QZSS-PNT-006 2024).
| Parameter | Description | Units |
|---|---|---|
| $WN_{a-n}$ | Almanac reference week | weeks |
| $t_{oa}$ | Almanac reference time of week | sec |
| $e$ | Difference from reference eccentricity | sec |
| $\delta_i$ | Difference from reference angle of inclination | semi-circle |
| $\dot{\Omega}$ | Rate of right ascension | semi-circle/sec |
| $\sqrt{A}$ | Square root of the semi-major axis | $\sqrt{m}$ |
| $\Omega_o$ | Longitude of ascending node of orbit plane at weekly epoch | semi-circle |
| $\omega$ | Argument of perigee | semi-circle |
| $M_0$ | Mean anomaly in epoch | semi-circle |
| $a_{f0}$ | SV clock bias coefficient | sec |
| $a_{f1}$ | SV clock drift coefficient | sec/sec |
Table 2. User algorithm ECEF calculation using Almanac parameters. Reference semi-major axis ($A_{REF}$)=26,599,710 m, angular velocity of Earth rotation ($\dot {\Omega}_e$)=7.2921151467×10-5 rad/s, Earth gravitational constant (μ)=3.986005×1014 m3/m2 defined in QZSS ICD (IS-QZSS-PNT-006 2024).
| Parameter | Description |
|---|---|
| $A_0 = A_{REF} + \delta_A$ | Semi-major axis [m] |
| $n_0 = \sqrt{\frac{\mu}{A_0^3}}$ | Mean motion [rad/s] |
| $t_k = t – t_{oa}$ | Elapsed time from almanac epoch [rad] |
| $M_0 = \Phi_0 – \omega_{REF}$ | Mean anomaly in almanac epoch [rad] |
| $M_k = M_0 + n_0 t_k$ | Mean anomaly [rad] |
| $M_k = E_k – e \sin E_k$ | Calculation of eccentric anomaly by Kepler’s Equation [rad] |
| $v_k = \tan^{-1} \left\{ \frac{\sqrt{1-e^2} \sin E_k}{\cos E_k – e} \right\}$ | True anomaly [rad] |
| $u_k = v_k + \omega_{REF}$ | Argument of latitude [rad] |
| $r_k = A_0 (1 – e \cos E_k)$ | Correction of radius [m] |
| $x’_k = r_k \cos u_k$ $y’_k = r_k \sin u_k$ | Position in orbital plane [m] |
| $\Omega_k = \Omega_0 + (\dot{\Omega} – \dot{\Omega}_k) t_k – \dot{\Omega}_e t_{oa}$ | Correction of longitude of ascending node [rad] |
| $x_k = x’_k \cos \Omega_k – y’_k \cos i \sin \Omega_k$ $y_k = x’_k \sin \Omega_k + y’_k \cos i \cos \Omega_k$ $z_k = y’_k \sin i$ | Satellite position in earth-fixed coordinate system [m] |
Reduced 알마낙은 Midi 알마낙과 마찬가지로 위성의 위치 계산에 필요한 정보를 제공하지만, 포함하는 요소가 간소화되어 있다 (IS-QZSS-PNT-006 2024). CNAV L2C 신호의 메시지 타입 12, 31과 CNAV2 L1C 서브프레임 3 페이지 3을 통해 위성에서 직접 사용자에게 Reduced 알마낙이 전송되며 Midi 알마낙 보다 간소화된 구조로 더 짧은 시간 안에 방송하여 사용자는 더 빠른 궤도 계산이 가능하다 (IS-QZSS-PNT-006 2024, Lee et al. 2025). Reduced 알마낙 또한 QZSS CNAV L2C에서 직접 데이터를 얻었으며 제공되는 주요 요소는 Table 3에 나타냈다.
Table 3. Reduced Almanac parameters defined in QZSS ICD (IS-QZSS-PNT-006 2024).
| Parameter | Description | Units |
|---|---|---|
| $WN_{a-n}$ | Almanac reference week | week |
| $t_{oa}$ | Almanac reference time of week | sec |
| $\delta_A$ | Difference from nominal semi-major axis | m |
| $\Omega_0$ | Longitude of ascending node of orbit plane at weekly epoch | semi-circle |
| $\Phi_0$ | Argument of latitude at reference time | semi-circle |
Reduced 알마낙을 통한 위성 위치 계산은 Midi 알마낙과 동일한 알고리즘을 이용한다. 다만, 궤도의 경사각($i$), 이심률($e$), 승교점 변화율($\dot{\Omega}$), 근지점 편각($\omega_{REF}$) 등 일부 요소는 Reduced 알마낙에 포함되지 않으므로, 일부 궤도 요소를 ICD 상수로 정의하며, ECEF 좌표 계산 시 적용한다. Table 4는 정지궤도(GEO)와 준천정궤도(Quasi-Zenith-Orbit, QZO)별 상수로 정의된 궤도 요소와 그 값을 정리한 것이다. 이러한 방식으로 Reduced 알마낙을 이용하면, Midi 알마낙 대비 낮은 정밀도가 예상되지만 간단한 연산만으로 위성 위치를 산출할 수 있다.
Table 4. Reduced Almanac constants parameters defined in QZSS ICD (ISQZSS-PNT-006 2024).
| Parameter | Unit | QZO satellite | GEO satellite |
|---|---|---|---|
| $e$ | – | 0.075 | 0 |
| $i$ | rad | 0.2389 (= 43°) | 0 |
| $\dot{\Omega}$ | rad/s | -8.7 × 10-10 | 0 |
| $W_{REF}$ | rad | -0.5 (= 270°) | 0 |
Reduced 알마낙 데이터는 현재 방송궤도력이나 Midi 알마낙과 달리 별도의 아카이브를 제공하는 서비스가 없기 때문에 본 연구에서는 알마낙이 담긴 QZSS CNAV L2C 신호를 직접 수신하여 데이터를 추출하였다. 데이터 수집은 2025년 8월 21일부터 2025년 9월 1일까지 진행되었고, Trimble Zephyr Model 2(안테나)와 Septentrio PolarX5(수신기)를 사용했다. 실험 장소와 장비 등의 실험환경은 Table 5에 정리하였다.
Table 5. Experiment overview.
| Date | Receiver | Antenna | Position | ||
|---|---|---|---|---|---|
| 2025.08.21 | Septentrio | Trimble | Latitude | Longitude | Height |
| ~2025.09.01 | PolarX5 | Zephyr model 2 | 36.399° | 127.375° | 93 m |
QZSS 항법데이터의 구체적인 획득과정은 다음과 같다. QZSS의 CNAV 항법메시지의 원시 데이터를 수집하기 위한 수신기 설정을 통해 L2C 원시 데이터 수신을 설정하여 원시데이터를 저장하였다. Septentrio 수신기의 경우 자체 포맷인 Septentrio Binary Format 파일 형식으로 원시 데이터를 저장한다. 이 원시 데이터는 Septentrio사에서 제공하는 GNSS receiver control and analysis software를 사용하여 ASCII 파일로 변환한다. Table 6은 ASCII 파일에서 확인할 수 있는 주요 요소를 정리하였다. ASCII 파일의 ‘NavBits’항에는 QZSS CNAV 메시지(300 bits)가 16진수 형태로 저장되어 있으며, 최종적으로 이를 ICD에 정의된 규칙을 따라 변환하여 항법메시지를 추출하였다.
Table 6. QZSS L2C CNAV raw ASCII file structure. defined in Polarx5 firmware v5.6.0 Reference Guide.
| Parameter | Description |
|---|---|
| Sync1 | A fixed 2-byte signal ($@) marking the start of a data block for synchronization. |
| Sync2 | – |
| CRC | A 16-bit value used to verify the data block’s integrity and check for errors. |
| ID | A 2-byte value that identifies the block’s type and version number. |
| Length | A 2-byte integer specifying the total size of the data block in bytes. |
| TOW | A time-tag representing the number of milliseconds that have passed since the beginning of the current GPS week. |
| WNc | The continuous GPS week number, which is not reset by the 1024-week rollover event. |
| SVID | Satellite ID |
| CRCPassed | Status of the CRC or parity check (0: CRC or parity check failed, 1: CRC or parity check passed) |
| ViterbiCnt | Viterbi decoder error count over the subframe |
| Source | Bit field (Bits 0~4: Signal type from which the bits have been reserved, Bits 5~7: Reserved) |
| Reserved | Reserved for future use, to be ignored by decoding software |
| Rxchannel | Receiver channel |
| NavBits | NavBits contains the 300 bits of a GPS CNAV subframe. Encoding: NavBits contains all the bits of the frame, including the preamble. The first received bit is stored as the MSB of NavBits[0]. The unused bits in NavBits[9] must be ignored by the decoding software. |
| Padding | Padding bytes |
Midi 알마낙의 경우 구체적인 항법메시지 추출과정은 다음과 같다. Midi 알마낙은 메시지 타입 37에 포함되어 있으며 구조는 Fig. 1과 같다. 16진수로 구성된 NavBits를 2진수로 변환하여 메시지를 구성하는 각 요소당 할당된 데이터로 2진수 데이터를 구분하면 QZSS CNAV L2C 원시 데이터 속 Midi 알마낙을 해석할 수 있다. 해석된 데이터는 실제 물리량이 아니기 때문에 한 번의 변환 과정이 더 필요하다. Least Significant Bit (LSB)를 각 요소의 값에 곱하여 실제 물리량을 알 수 있으며 Midi 알마낙의 각 요소당 할당된 데이터 및 LSB는 Table 7에 정리하였다.
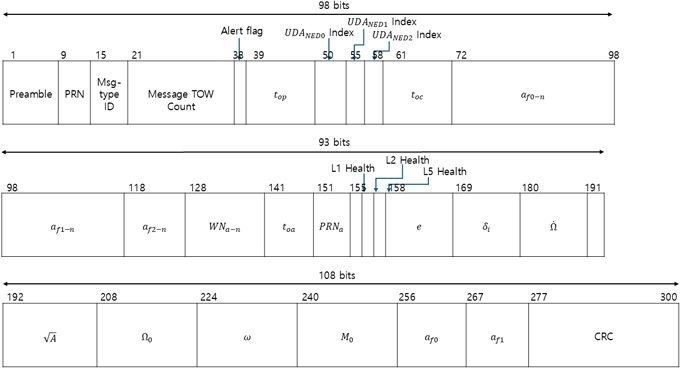
Fig. 1. QZSS L2C message type 37 defined in QZSS ICD (IS-QZSS-PNT-006 2024).
Table 7. Midi almanac parameter LSB defined in QZSS ICD (IS-QZSSPNT-006 2024).
| Parameter | Number of bits | LSB |
|---|---|---|
| $WN_{a-n}$ | 13 | 1 |
| $t_{oa}$ | 8 | $2^{12}$ |
| $e$ | 11 | $2^{-16}$ |
| $\delta_i$ | 11 | $2^{-14}$ |
| $\dot{\Omega}$ | 11 | $2^{-33}$ |
| $\sqrt{A}$ | 17 | $2^{-4}$ |
| $\Omega_o$ | 16 | $2^{-15}$ |
| $\omega$ | 16 | $2^{-15}$ |
| $M_0$ | 16 | $2^{-15}$ |
| $a_{f0}$ | 11 | $2^{-20}$ |
| $a_f$ | 10 | $2^{-37}$ |
Reduced 알마낙은 메시지 타입 12와 31에 포함되며 메시지 구조는 Fig. 2와 같다. Midi 알마낙과 달리 Almanac reference week ($WN_{a-n}$), Almanac reference time of week ($t_{oa}$)을 제외한 궤도 요소와 위성 Pseudo Random Noise (PRN) Code 정보가 Reduced 알마낙 패킷에 있으며 메시지마다 패킷에 담긴 정보의 차이가 있다. 메시지 타입 12는 총 7개의 Reduced 알마낙 패킷을 가지며, 보통 1번과 3번 패킷에 PRN 196와 PRN 200 위성의 Reduced 알마낙이 포함된다. 메시지 타입 31은 4개의 패킷을 가지며 2, 3, 4번 패킷에 각각 PRN 194, PRN 195, PRN 199 위성의 데이터를 포함한다. 모든 패킷은 Fig. 3과 같이 동일한 구조를 갖는다. Midi 알마낙과 마찬가지로 처음 신호에서 얻은 값은 실제 물리량이 아니기 때문에 각 요소에 적절한 LSB를 곱하여 실제 물리량을 얻으며 Reduced 알마낙의 각 요소당 LSB는 Table 8에 정리하였다.
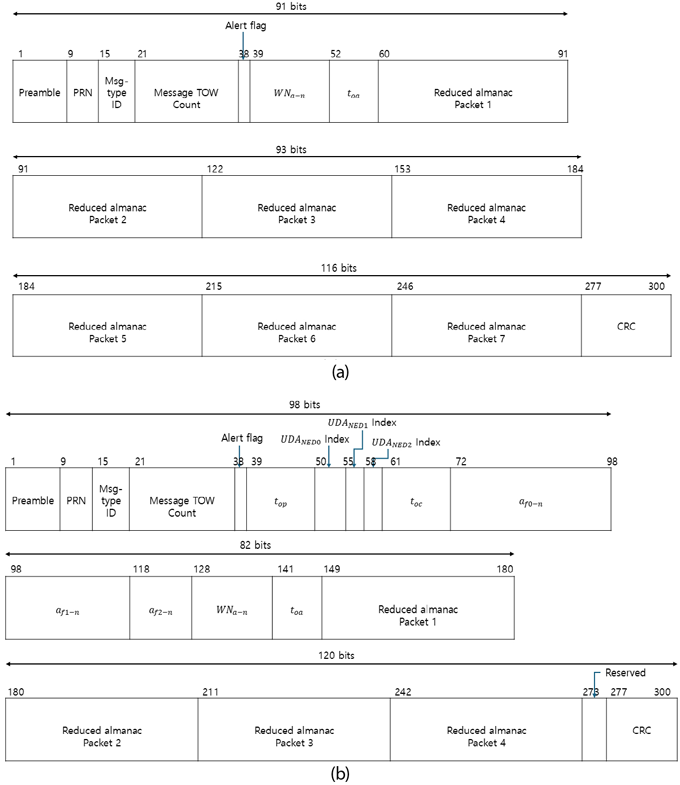
Fig. 2. (a) QZSS CNAV L2C message type 12 and (b) QZSS CNAV L2C message type 31 defined in QZSS ICD (IS-QZSS-PNT-006 2024).
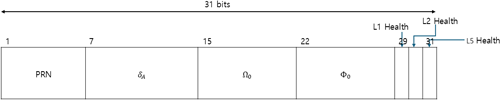
Fig. 3. QZSS Reduced almanac packet structure defined in QZSS ICD (IS-QZSS-PNT-006 2024).
Table 8. Reduced almanac parameter LSB defined in QZSS ICD (IS-QZSSPNT-006 2024).
| Parameter | Number of bits | LSB |
|---|---|---|
| $WN_{a-n}$ | 13 | 1 |
| $t_{oa}$ | 8 | $2^{12}$ |
| $\delta_A$ | 8 | $2^9$ |
| $\Omega_o$ | 7 | $2^{-6}$ |
| $\Phi_0$ | 7 | $2^{-6}$ |
Midi 알마낙과 Reduced 알마낙은 $WN_{a-n}$과 $t_{oa}$로 구성된 기준 시각을 기준으로 산출되므로, 기준시각의 갱신 주기는 알마낙이 생성되는 실제 주기를 의미한다. QZSS ICD (IS-QZSS-PNT-006 2024)는 이 주기를 1일(86,400초)로 정의하고 있다. 이번 절에서는 이 규격이 실제 운용 환경에서 일관되게 유지되는지 검증하였다.
먼저 두 알마낙의 기준시각 갱신 주기 파악을 위해 실측 데이터인 QZSS CNAV L2C 메시지 타입 37과 12에서 Midi 알마낙과 Reduced 알마낙의 기준시각을 각각 추출하여 비교하였다. Table 9는 2025년 8월 21일부터 2025년 9월 1일까지 수신된 두 알마낙의 기준시각을 보여준다. 또한, 해당 기준시각을 갖는 알마낙이 업데이트되었음을 확인하기 위해 최초로 수신된 시각을 UTC로 함께 나타냈다. 분석결과, 동일기간 수신된 두 알마낙의 기준시각은 완전히 일치하였다. 이는 Midi 알마낙과 Reduced 알마낙이 서로 다른 메시지 타입을 통해 전송되더라도 동일한 기준시각을 공유하며 동시에 생성됨을 의미한다.
Table 9. Midi and Reduced almanac $t_{oa}$ in 2025.08.21 ~ 2025.09.01.
| $WN_{a-n}$ | Midi almanac $t_{oa}$ (s) | Reduced almanac $t_{oa}$ (s) | First Reception Time (UTC) |
|---|---|---|---|
| 2381 | 0 | 0 | 2025.08.21 02:26:06 |
| 2381 | 86016 | 86016 | 2025.08.22 01:04:30 |
| 2381 | 131072 | 131072 | 2025.08.22 13:04:30 |
| 2381 | 176128 | 176128 | 2025.08.23 01:04:30 |
| 2381 | 241664 | 241664 | 2025.08.23 20:02:06 |
| 2381 | 262144 | 262144 | 2025.08.24 01:04:30 |
| 2381 | 270336 | 270336 | 2025.08.24 04:02:06 |
| 2381 | 348160 | 348160 | 2025.08.25 01:04:30 |
| 2381 | 434176 | 434176 | 2025.08.26 01:04:30 |
| 2381 | 520192 | 520192 | 2025.08.27 01:04:30 |
| 2382 | 0 | 0 | 2025.08.28 01:04:30 |
| 2382 | 86016 | 86016 | 2025.08.29 01:04:30 |
| 2382 | 176128 | 176128 | 2025.08.30 01:04:30 |
| 2382 | 262144 | 262144 | 2025.08.31 01:04:30 |
| 2382 | 348160 | 348160 | 2025.09.01 01:04:30 |
다음으로, 두 알마낙의 실측 데이터기반 기준시각 갱신 주기의 안전성을 분석하여 Fig. 4에 나타냈다. Fig. 4의 y축은 연속된 기준시각 간 차이($\Delta t_{oa}$) 값이며, x축은 각 $\Delta t_{oa}$에 해당하는 Day of year (DOY)다. DOY 234, 235, 236에서 $\Delta t_{oa}$가 1일 미만으로 관측되었고 하루에 여러 번 갱신이 발생했음을 나타낸다. 이는 일부 날짜에서 실측 데이터기반 기준시각 갱신 주기가 QZSS ICD (IS-QZSS-PNT-006 2024)를 따르지 않고 있음을 보였다.
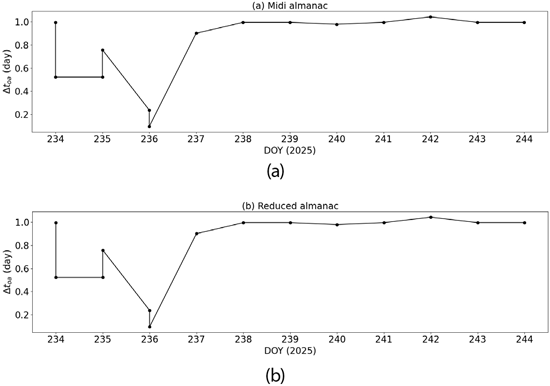
Fig. 4. (a) Midi almanac $\Delta t_{oa}$, and (b) Reduced almanac $\Delta t_{oa}$, in 2025.08.21 ~ 2025.09.01. by QZSS CNAV L2C Message type 12, 37.
실측 데이터와 QZSS 아카이브의 기준시각을 비교 분석하기 위해 동일 기간(2025년 8월 21일 ~ 2025년 9월 1일) QZSS 아카이브에서 제공하는 Midi 알마낙 기준시각을 Table 10에 나타냈다. 이때, 기준시각의 직관적인 날짜 파악을 돕기 위해 해당 시각을 UTC로 변환하였다. 변환 과정에서는 2025년 기준 GPST와 UTC 간의 윤초 차이인 18초를 보정하여 적용하였다. 또한, 기준시각의 안정성을 분석한 결과를 Fig. 5에 나타냈다. Table 10의 분석결과 QZSS 아카이브의 Midi 알마낙 기준시각은 실측데이터와 달리 더 적은 수의 기준시각을 포함하고 있다. Figs. 4와 5를 비교해보면, QZSS 아카이브 Midi 알마낙의 기준시각이 실측 데이터보다 더 안정적임을 나타낸다. Fig. 5에서 대부분 하나의 DOY에 하나의 $\Delta t_{oa}$만 존재했으며, DOY 236을 제외하면, 10일의 단기 구간에서 $\Delta t_{oa}$가 QZSS ICD (IS-QZSS-PNT-006 2024)에 정의된 1일 주기에 비교적 근접하는 경향을 보였다.
Table 10. Midi almanac toa in 2025.08.21~2025.09.01 by QZSS archive.
| $WN_{a-n}$ | $t_{oa}$ (s) | UTC |
|---|---|---|
| 2381 | 0 | 2025.08.23 23:59:42 |
| 2381 | 131072 | 2025.08.25 12:24:14 |
| 2381 | 241664 | 2025.08.26 19:07:26 |
| 2381 | 270336 | 2025.08.27 03:05:18 |
| 2381 | 348160 | 2025.08.28 00:42:22 |
| 2381 | 434176 | 2025.08.29 00:35:58 |
| 2381 | 520192 | 2025.08.30 00:29:34 |
| 2382 | 0 | 2025.08.30 23:59:42 |
| 2382 | 86016 | 2025.08.31 23:53:18 |
| 2382 | 176128 | 2025.09.02 00:55:10 |
| 2382 | 262144 | 2025.09.03 00:48:46 |
| 2382 | 348160 | 2025.09.04 00:42:22 |
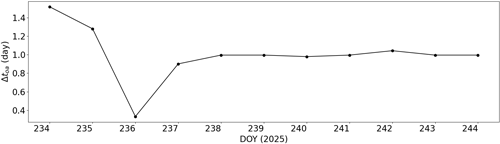
Fig. 5. Midi almanac $\Delta t_{oa}$ in 2025.08.21~2025.09.01 by QZSS archive.
Fig. 5에서 수행한 단기 분석(8월 21일부터 9월 1일까지)과 별도로, Midi 알마낙 기준시각의 장기적인 갱신 패턴 확인하기위해 Fig. 5의 시점을 제외한 2025년 5월 4일부터 8월 3일까지 약 3개월간 QZSS 아카이브의 데이터를 분석하여 Fig. 6에 나타냈다. 분석기간이 3개월로 늘어남에 따라, Fig. 6에서는 Fig. 5와 달리 더 큰 변동폭이 확인되었다. Fig. 6에서는 QZSS Midi 알마낙의 생성 주기가 QZSS ICD (IS-QZSS-PNT-006 2024)에 정의된 1일 주기를 안정적으로 유지하지 않았다. 1일 주기를 지키는 DOY도 있었지만, 몇몇 DOY에서 0.25~1.75일의 불규칙한 갱신 주기가 다수 관찰되었다. 이는 현재 QZSS 위성군이 완전하게 구축되지 않은 과도기적 운용 상태에서 기인한 것으로 예상된다.
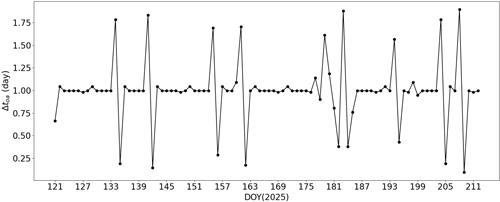
Fig. 6. Midi almanac $\Delta t_{oa}$ in 2025.05.04 ~ 2025.08.03. by QZSS archive.
Reduced 알마낙의 경우 별도의 아카이브를 통해 자료를 제공하지 않기 때문에 장기적인 실측 데이터를 확인할 수 없었다. 하지만 본 연구에서 획득한 단기 실측 데이터(Table 9)에서 경우 Midi 알마낙과 Reduced 알마낙은 동시에 생성되는 것으로 확인되었기에, Fig. 6의 장기 결과 분석은 Reduced 알마낙에도 똑같이 적용될 것으로 판단된다. 결과적으로 기준시각의 하루 주기적 갱신은 실제 운용 단계에서 항상 일관되게 적용되는 것이 아님을 확인할 수 있다.
QZSS ICD (IS-QZSS-PNT-006 2024)에 따르면, 메시지 타입 12와 메시지 타입31(Reduced 알마낙을 포함한 메시지 타입들)을 최대 1200초의 전송 간격을 갖는다. 이번 절에서는 이 규격이 실제 운용 환경에서 일관되게 충족되는지 검증하였다.
Fig. 7은 2025년 8월 21일부터 9월 1일까지 수신에 성공한 3개의 위성(PRN 194, PRN 195, PRN 199)의 QZSS CNAV L2C 메시지 타입 12와 메시지 타입31의 수신 간격(y축)을 DOY(x축)에 따라 나타냈다. Fig. 7의 대부분의 구간에서 수신 간격은 QZSS ICD (IS-QZSS-PNT-006 2024)에 정의된 최대 송신 간격(1200초)을 준수하는 288초(붉은 점선)로 안정적으로 유지되었다. 이는 항법 메시지가 규격 대로 안정적으로 송신되고 있음을 의미한다. 그러나 모든 위성에서 주기적 혹은 비주기적으로 최대 송신 간격을 초과하는 수신 공백이 관측되었다. 이런 공백은 위성 궤도 특성과 연관이 있는 것으로 보인다. 준천정 궤도 위성인 PRN 194와 PRN 195는 위성이 남반구에 위치할 때 북반구 수신 지점에서 가시성이 확보되지 않아 발생하는 주기적인 신호 단절이 관측 되었다. 반면, 정지궤도 위성인 PRN 199는 불규칙한 송신 간격을 보였다. Notice Advisory to QZSS Users (NAQU) 확인 결과 PRN 199는 예정된 궤도 기동(NAQU 2025393)을 앞둔 시점에서의 신호 불안정 및 수신 환경의 영향이 복합적으로 작용한 것으로 추정된다. 추가적으로, 수신된 데이터의 신뢰성 검증을 각 메시지의 Alert Flag와 수신된 알마낙에 포함된 전체 위성군의 Health Flag를 검사하였다. 분석 기간 동안 Alert Flag는 모두 ‘0’으로 확인되었다. Health Flag의 경우 본 절의 분석 대상인 위성들(PRN 194, 195, 199)에서 모두 ‘0’으로 확인되었다. 다만, 알마낙 데이터에 포함된 PRN 200의 경우 Health Flag가 ‘5’로 관측되었다. 이는 QZSS ICD (IS-QZSS-PNT-006 2024)에 의하면 L1, L5 신호의 비정상 상태를 의미하며, 본 연구의 대상인 L2C 신호는 정상 상태임을 확인하여 데이터의 유효성을 확보하였다.
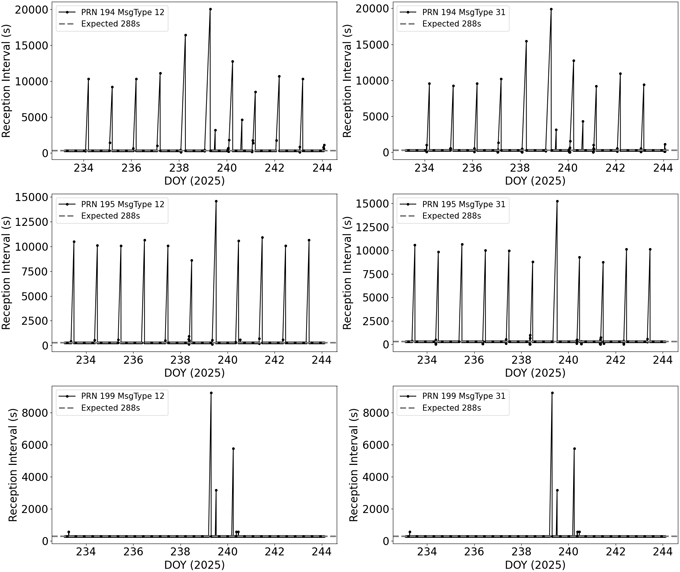
Fig. 7. Reception intervals of QZSS CNAV L2C Message Type 12 (left) and 31 (right) for PRN 194, 195, and 199 (from top to bottom).
따라서, QZSS 위성의 신호 전송 주기는 보통 288초로 안정적이나, 위성의 가시성 및 운용 조건등 실제 수신환경의 영향으로 인해 사용자가 체감하는 수신 간격은 일시적으로 QZSS ICD (IS-QZSS-PNT-006 2024)의 최대 송신 간격을 초과할 수 있음을 확인하였다.
Reduced 알마낙의 정확도 평가에 앞서, 이를 구성하는 궤도 요소($\Delta A$, $\Omega_0$, $\Phi_0$)의 동적 특성을 파악해야 한다. 2.2절에서 기술했듯이, Reduced 알마낙은 궤도의 경사각($i$), 이심률($e$), 승교점 변화율($\dot{\Omega}$), 근지점 편각($\omega_{REF}$) 등 일부 궤도요소를 상수로 고정하는 대신 세 가지 궤도 요소($\Delta A$, $\Omega_0$, $\Phi_0$)만 기준시각 마다 갱신한다. 갱신되는 궤도 요소들이 시간에 따라 어떻게 변하는지 분석하는것은, Reduced 알마낙의 궤도 요소가 위성의 실제 궤도를 얼마나 보정하는지 이해하는데 필요하다. 이번 절에서는 PRN 196의 실측 데이터를 활용하여, 각 기준시각에 따라 방송된 세 가지 궤도요소($\Delta A$, $\Omega_0$, $\Phi_0$)의 변화를 관측했다.
Fig. 8은 실험기간(2025년 8월 21일 ~ 9월 1일)동안 수집된 15개의 유효 기준시각(붉은 점)에 해당하는 각 궤도 요소의 값(y축)을 DOY(x축)에 따라 나타냈다. 이 그림은 각 궤도 요소의 동적 특성을 보여준다. $\Omega_0$은 가장 안정적인 변화를 가지며 분석 기간 동안 단 한 차례의 변화만 관측되었다. 값은 약 0.62 semi-circle 수준을 일정하게 유지하다가 약 0.58 semi-circle로 하강하여, 0.04 semi-circle 정도의 변동폭을 갖는다. $\Delta A$는 분석 기간 동안 다수의 변화가 관측됐으며 값의 범위는 최소 약 -8 km에서 최대 약 -6.3 km에 걸쳐, 전체 변동 폭이 약 1.8 km에 달한다. 또한, $\Phi_0$도 다수의 변화가 있었으며 값의 범위는 최소 약 -0.8 semi-circle에서 최대 약 0.2 semi-circle까지, 약 1 semi-circle의 변동 폭을 보인다. Reduced 알마낙의 궤도 요소에서 $\Omega_0$은 값이 잘 변하지 않는 정적인 궤도 요소, $\Delta A$, $\Omega_0$은 빈번하게 갱신되는 동적인 궤도요소임을 알 수있다.
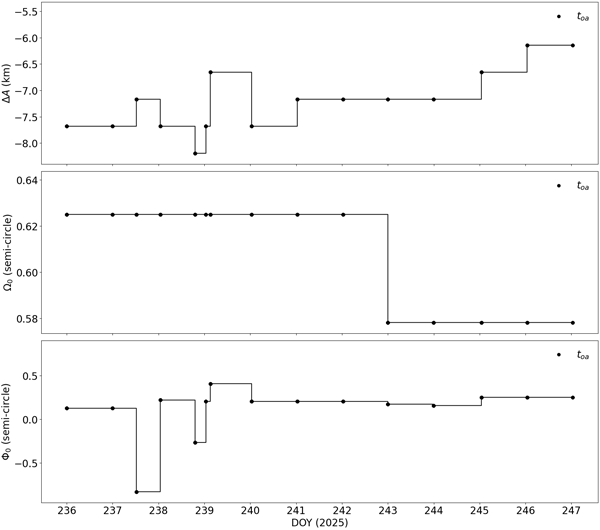
Fig. 8. Variation of PRN 196 Reduced almanac parameters (ΔA, Ω0, Φ0 ) with toa based on data from packet 1 of QZSS CNAV L2C Message Type 12.
이 연구의 핵심 목표는 QZSS Performance Standard (PS-QZSS-03 2022)에 정의되지 않은 Reduced 알마낙의 위치 정확도를 산출하는 것이다. Midi 알마낙의 3차원 위치 오차는 ≤10 km (3D-1σ)로 정의되어 있다 (PS-QZSS-03 2022). Reduced 알마낙은 Midi 알마낙에 비해 단순화된 궤도 요소를 제공하므로, 이로부터 산출되는 ECEF의 정확도는 Midi 알마낙보다 낮을 것으로 예상된다. 본 절에서는 QZSS 아카이브에서 제공하고 위성의 실제 위치 대비 수 cm의 정확도를 갖는 정밀궤도력과 Reduced 알마낙 기반 ECEF를 비교하여 3차원 위치 오차를 산출하고, 궤도 요소 간소화가 3차원 위치 계산에 미치는 영향을 검증하였다.
3차원 위치 오차 분석을 위해 2025년 8월 21일부터 9월 1일까지 총 12개의 기준시각에 맞춰 생성된 Reduced 알마낙을 사용하였다(하루에 기준시각이 2번 생성되는 날짜는 00시에 가까운 기준시각만 사용). 각 기준시각의 유효기간(±3일) 동안 5분 간격으로 Reduced 알마낙 기반 ECEF를 생성하였다. 정밀궤도력은 15분 간격으로 생성되기 때문에, 5분 간격의 Reduced 알마낙 기반 ECEF와 시점 일치를 위해 다항식 보간을 수행하였다. NAQU 확인 결과, 분석 기간 중 PRN 200은 공식적인 서비스 중단(NAQU 2025392)이 있었으며, PRN 199는 9월 3일 수행된 대규모 궤도 기동(NAQU 2025393)이 마지막 기준시각(9월 1일)의 분석 유효기간(±3일)에 포함되어 데이터 공백 및 오차를 유발하는 것으로 확인되었다. 이에 따라 정밀 분석에 부적합한 두 위성을 제외하고, 나머지 PRN 194, PRN 195, PRN 196을 대상으로 3차원 위치 오차를 분석하였다.
Fig. 9는 산출한 reduced 알마낙의 3차원 위치 오차를 기준시각 ($t_{oa}$)부터 경과한 시간(±3일)에 따라 위성별로 나타낸 것이다. 옅은 실선은 12개 기준시각 각각의 유효기간 내에서 5분 간격으로 산출한 3차원 위치 오차이며, 붉은 실선은 이 오차들을 동일 시점에서 평균한 전체적인 오차 추세이다. 분석결과 Reduced 알마낙은 정밀궤도력 대비 수천 km 규모의 큰 오차를 보였다. 이는 QZSS ICD (IS-QZSS-PNT-006 2024)에 정의된 Midi 알마낙의 ≤10 km ($3D-1σ$) 오차와 비교할 때 상당히 큰 차이다. Fig. 10은 PRN 196의 특정 기준시각($WN_{a-n}$=2381, $t_{oa}$=0)에 대하여 Midi 알마낙과 Reduced 알마낙을 각각 정밀궤도력과 비교한 결과이다. Midi 알마낙의 경우 성능 규격에 명시된 오차 수준을 유지하는 것을 알 수 있다. Fig. 10에서 Midi 알마낙의 3차원 위치 오차는 최대 14 km 수준까지 도달하는 구간이 존재하였고, 전체 분석 기간에 대한 통계적 분석결과 오차는 약 7.24 km ($3D-1σ$) 이었다. 이는 QZSS Performance Standard (PS-QZSS-03 2022)의 3차원 위치 오차 수준을 안정적으로 유지한다. 반면, Reduced 알마낙은 3차원 위치 오차가 최대 5,000 km에 달하며, Midi 알마낙에 비해 아주 큰 오차를 보인다.
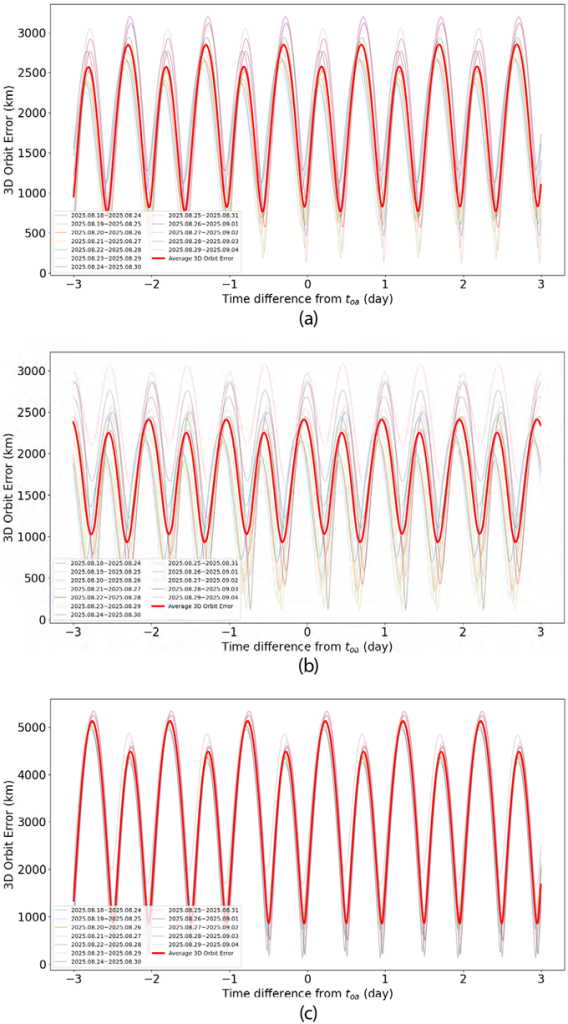
Fig. 9. ECEF position errors of Reduced almanac-derived orbit relative to precise orbit. (a) PRN 194 error, (b) PRN 195 error, and (c) PRN 196 error. The analysis is based on Precise Ephemeris (QZSS archive) and Reduced almanac (QZSS CNAV L2C Message Types 12 and 31).
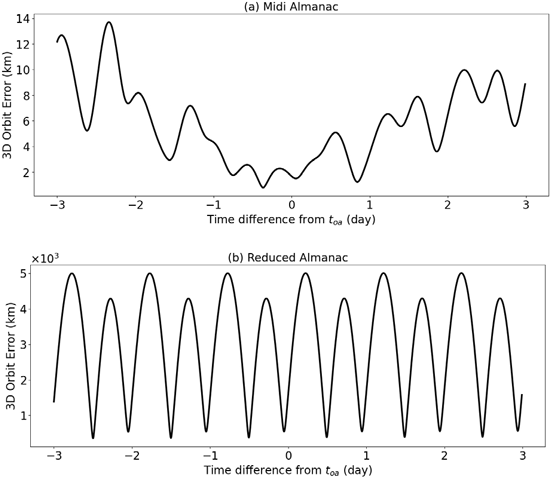
Fig. 10. 3D Orbit error about (a) Midi almanac and (b) Reduced almanac over the same period (August 21–27, 2025). The almanacs are referenced to $WN_{a-n}$=2381, $t_{oa}$=0 (2025.08.23 23:59:42UTC). Errors are based on Precise Ephemeris. This Midi almanac is from the QZSS archive and the Reduced almanac is from QZSS CNAV L2C Message Type 12 data.
Fig. 10에 나타난 두 알마낙의 오차 수준이 차이가 큰 원인을 파악하기 위해 두 알마낙의 궤도 요소를 Table 11에 비교하였다. Midi 알마낙과 달리 Reduced 알마낙에서 궤도 경사각은 상수로 처리된다. 이로 인해 Midi 알마낙과 Reduced 알마낙간에 궤도경사각은 6.18° 차이가 발생했으며, 다른 궤도 요소들의 차이 보다 큰 차이를 보인다. 이러한 궤도요소의 차이로 인해 발생하는 오차를 동경(radial), 진행(along), 직교(cross) 방향 오차로 보면 Table 12와 같다. Table 12는 Table 11에서 확인된 궤도 요소의 상수 치환이 3차원 위치 오차에 미치는 영향을 분석한 결과로, Table 12의 각 오차 항목(error type)은 ECEF 기준 반경($r_{norm}$=43165.09 km)을 공통 계수로 사용하여, Table 11에 나타낸 알마낙 간의 궤도 요소 차이를 실제 거리 오차로 환산하였다. 각 항목을 살펴보면, Radial Error는 이심률 차이에 $r_{norm}$를 곱하여 반경 방향의 오차를 계산한 값이며, Cross-track Error는 궤도 경사각 차이에 대한 탄젠트값에 $r_{norm}$를 곱하여 궤도면 수직 방향의 오차를 계산한 값이다. $\dot{\Omega}$ Drift는 승교점 경도 변화율 차이가 1일동안 누적되었을 때의 각도 변화량에 $r_{norm}$를 곱하여 궤도면이 회전하며 발생하는 누적 오차를 계산한 값이다. Along track Error는 근지점 이각 차이에 $r_{norm}$를 곱하여 궤도 진행 방향의 오차를 나타낸다. Table 12에서 보듯이 Cross-track Error가 4718.35 km로 다른 오차들에 비해 압도적으로 크게 나타났다. 이는 Table 11에서 확인 했듯이 궤도경사각의 차이로 인해 것으로 상수로 정의된 궤도경사각이 Reduced 알마낙의 3차원 위치 오차를 지배하는 가장 큰 원인이다.
Table 11. Comparison of variable parameters in the Midi almanac and their corresponding constant values in the Reduced almanac, defined in ICD (ISQZSS-PNT-006 2024).
| Parameter | Unit | Midi almanac | Reduced almanac | Difference |
|---|---|---|---|---|
| $e$ | – | 7.422215 × 10-2 | 7.5 × 10-2 | 7.778549 × 10-4 |
| $i_0$ | degree | 36.821365 | 43 | 6.180635 |
| $\dot{\Omega}$ | rad/s | -2.342955 × 10-9 | -2.733186 × 10-9 | 3.902309 × 10-10 |
| $\omega$ | rad | -1.590535 | -1.570796 | 1.973877 × 10-2 |
Table 12. Analysis of orbital error components caused by the parameter simplification in the Reduced almanac.
| Error type | Magnitude | Unit |
|---|---|---|
| Radial error | 33.89 | km |
| Cross track Error | 4718.35 | km |
| $\dot{\Omega}$ drift | 1.47 | km/day |
| Along track error | 860.02 | km |
결론적으로, 3장의 분석을 통해 알마낙의 기준시각 갱신 및 메시지 수신 주기가 QZSS ICD(IS-QZSS-PNT-006 2024)와 달리 불규칙하게 운용됨을 확인하였다. 또한, 정확도 검증에서 Midi 알마낙은 QZSS ICD (IS-QZSS-PNT-006 2024)에 정의된 기준 성능을 충족한 반면, Reduced 알마낙은 정확도에 대한 성능기준이 없기는 하지만 주요 궤도 요소를 고정 상수로 대체하는 구조적 한계 때문에 수천 km의 오차를 보임을 입증하였다.
본 연구는 선행 연구와 달리 QZSS 위성에서 실제 방송되는 CNAV 항법 메시지를 직접 수신 및 처리하여 Midi 및 Reduced 알마낙의 실제 운용 특성과 위치 정확도를 실측 데이터 기반으로 검증하였다. 특히, QZSS Performance Standard에 정의되지 않은 Reduced 알마낙의 위치 오차를 정량적으로 산출하고 그 원인을 규명하였다. QZSS CNAV L2C 실측 데이터를 바탕으로 본 연구의 주요 결론은 다음과 같다.
첫째, 알마낙의 실제 운용 주기는 QZSS ICD 규격과 차이가 있다. Midi 및 Reduced 알마낙은 동일한 기준시각을 공유하며 동시에 생성됨을 확인하였다. 그러나 기준시각의 갱신 주기는 QZSS ICD에 정의된 하루의 주기를 안정적으로 따르지 않고 0.25일에서 1.75일까지 불규칙한 간격으로 갱신되었다. 이는 현재 QZSS 시스템이 과도기적 운용 상태에 있음을 시사한다. 또한, Reduced 알마낙을 포함하는 메시지 타입 12와 31의 송신 주기는 288초로 안정적이었으나, 준천정궤도 위성의 가시성 및 정지궤도 위성의 궤도 기동과 같은 실제 운용 환경의 영향으로 인해 사용자의 수신 간격은 QZSS ICD 최대치인 1200초를 초과하는 경우가 관측되었다.
둘째, Reduced 알마낙은 구조적으로 수천 km의 위치 오차를 내포한다. 본 연구의 핵심 목표였던 정확도 분석 결과 Midi 알마낙은 정밀궤도력 대비 ≤10 km (3D-1σ)의 오차를 보여 성능 기준을 충족했다. 반면, Reduced 알마낙은 정밀궤도력 대비 수천 km에 달하는 매우 큰 오차를 나타냈다.
셋째, Reduced 알마낙 오차의 핵심 원인은 궤도 요소의 상수화다. 이러한 오차는 Reduced 알마낙이 이심률, 궤도 경사각 등 위성의 동적인 궤도 변화를 나타내는 핵심 요소들을 실제 값이 아닌 미리 정의된 고정 상수로 대체하기 때문임을 규명하였다. 특히 궤도 경사각의 상수화는 수천 km 수준의 Cross-track 오차를 유발하는 지배적인 원인이었다.
종합하면, Reduced 알마낙은 데이터 전송 효율성은 높지만, 궤도 요소 간소화로 인해 구조적으로 큰 오차를 내포하고 있음을 실측 데이터를 통해 확인하였다. 따라서 Reduced 알마낙은 정밀한 위치 계산보다는 수신기가 초기 신호를 신속하게 탐색하는 용도로만 활용되어야 한다. 본 연구의 분석 결과는 향후 개발될 한국형 위성항법시스템(KPS)의 알마낙 설계 시, 요소 간소화 수준과 그에 따른 정확도 저하 사이의 관계를 정량적으로 이해하고 최적의 운용 전략을 수립하는 데 참고자료로 기여할 수 있을 것이다.
This research was supported by Core Technology Development for Korea Positioning System funded by the Korea AeroSpace Administration (KASA).
Conceptualization, M.P. and K.R.; methodology, M.P.; software, M.P.; validation, M.P. and K.R.; formal analysis, M.P. and K.R.; investigation, M.P., K.R., and E.P; data curation, M.P. and K.R.; writing—original draft preparation, M.P.; writing—review and editing, K.R. and E.P.; visualization, M.P.; supervision, K.R.
The authors declare no conflict of interest.
Cabinet Office (Japan), Satellite Positioning, Navigation and Timing Service [Internet], cited 2025 Sep 2. https://sys.qzss.go.jp/dod/en/archives/pnt.html
IS-QZSS-PNT-006 2024, Quasi-Zenith Satellite System Interface Specification Satellite Positioning, Navigation and Timing Service. https://qzss.go.jp/en/technical/download/pdf/ps-is-qzss/is-qzss-pnt-006.pdf?t=1761030493527
Kim, K. H., Jo, Y. R., Park, B. W., & Kim, O.-J. 2024, An Experimental Investigation on Broadcast Intervals and Sequences of GPS CNAV, QZSS LNAV/CNAV, and BDS CNAV/CNAV-2. Journal of Positioning, Navigation, and Timing, 13, 319-329. https://doi.org/10.11003/JPNT.2024.13.3.319
Lee, H. L., Kim, S. H., Park, J. M., Jeong, S. H., Yu, J. W., et al. 2024, A Survey on New Parameters of GPS CNAV/CNAV-2 and Their Roles. Journal of Positioning, Navigation, and Timing, 13, 45-52. https://doi.org/10.11003/JPNT.2024.13.1.45
Lee, H. L., Kim, S. H., Park, J. M., Jeong, S. H., Yu, J. W., et al. 2025, A Comparative Survey of GPS Midi and Reduced Almanacs. Journal of Positioning, Navigation, and Timing, 14, 101-108. https://doi.org/10.11003/JPNT.2025.14.2.101
Misra, P. & Enge, P. 2006, Global Positioning System: Signals, Measurements, and Performance, 2nd ed. (Lincoln: Ganga-Jamuna Press).
PS-QZSS-03 2022, Quasi-Zenith Satellite System Performance Standard. https://qzss.go.jp/en/technical/download/pdf/ps-is-qzss/ps-qzss-003.pdf?t=1658287396868
Xiaogang, X. & Mingquan, L. 2017, Broadcast Ephemeris Model of the BeiDou Navigation Satellite System. Journal of Engineering Science and Technology Review, 10, 65-71. https://doi.org/10.25103/jestr.104.09