Gyu-In Jee1†![]() , Young Jae Lee2
, Young Jae Lee2![]() , JinHyeok Jang3
, JinHyeok Jang3![]() , Chulsoo Lee3
, Chulsoo Lee3![]() , Byunggi Jung3
, Byunggi Jung3![]()
1Department of Electrical and Electronics Engineering, Konkuk University, Seoul 05029, Korea
2Department of Mechanical and Aerospace Engineering, Konkuk University, Seoul 05029, Korea
3LIGNex1, Seongnam 13488, Korea
†Corresponding Author: Gyu-In Jee, E-mail: gijee@konkuk.ac.kr
Citation: Jee, G.-I., Lee, Y. J., Jang, J.H., Lee, C., & Jung, B. 2026, Multi-Objective Optimization-Based Design of a Low-Earth-Orbit Satellite Constellation to Enhance KPS Performance, Journal of Positioning, Navigation, and Timing, 15, 63-74.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2026 March, Volume 15, Issue 1, pages 63-74. https://doi.org/10.11003/JPNT.2026.15.1.63
Received on Jan 02, 2026, Revised on Jan 23, 2026, Accepted on Feb 04, 2026, Published on Mar 15, 2026.
Copyright © The Institute of Positioning, Navigation, and Timing
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
The Korean Positioning System (KPS), a regional satellite navigation system composed of seven to eight satellites, is susceptible to a lack of visible satellites in certain environments due to its small constellation size. Furthermore, securing a sufficient number of ground monitoring stations, which are essential for Precise Orbit Determination (POD) of KPS satellites, over a wide area on the Korean Peninsula is a significant challenge. This paper explores augmenting the KPS with a Low Earth Orbit (LEO) satellite constellation to address these limitations. For users, such an augmentation increases the number of visible satellites and thereby reduces the Dilution of Precision (DOP). For the system, LEO satellites can function as space-based mobile monitoring stations, effectively expanding the tracking network and improving satellite POD performance. While a larger LEO constellation yields greater performance benefits, it also incurs higher costs. Therefore, this study addresses the problem of designing a LEO constellation that minimizes the number of satellites while maximizing performance improvements. We formulate this as a multi-objective optimization problem with conflicting objectives, seeking Pareto optimal solutions. A genetic algorithm-based multi-objective optimization approach, which is well-suited for constellation design, is utilized to find the Pareto front. The results indicate that an efficient Pareto optimal solution for minimizing user DOP can be achieved with a constellation of approximately 24 LEO satellites. To enhance satellite POD performance, the most efficient design consists of six LEO satellites. Crucially, we designed an effective six to eight satellite LEO constellation that improves POD even when ground stations are confined to the domestic region and demonstrate the feasibility of domestic-only KPS ground infrastructure. The presented methodology can provide valuable guidelines for designing optimal LEO constellations to augment and enhance the future KPS.
KPS, LEO-PNT, DOP, POD, constellation design
위성기반 Positioning, Navigation, and Timing (PNT) 시스템은 중궤도 혹은 정지궤도/경사궤도에 의존하던 기존의 Global Navigation Satellite System (GNSS) 체계에서 벗어나, 저궤도 (Low Earth Orbit, LEO) 위성군을 포함하는 다중 계층 아키텍처를 도입하려 하고 있다 (Won et al. 2024). 이러한 변화는 재밍 및 스푸핑에 강인하고 신뢰성 높은 항법 서비스에 대한 수요 증가와 5G/6G 통신, 자율 시스템, 국가 안보 등 차세대 기술의 요구 사항에 의해 촉발되었다.
Starlink, OneWeb, IRIDIUM 같은 상용 거대 위성군은 본래 통신서비스를 목적으로 하고 있지만, PNT 응용 분야에서도 사용되고 있다. 중국에서는 Centispace, Geespace, SatNet과 같은 전용 LEO-PNT 시스템 구축도 진행되고 있다. 이 이외에도 저궤도를 활용한 PNT 기술 개발이 활발하게 진행되고 있다 (Eissfeller et al. 2024). 큐브위성 (CubeSat)과 같은 소형 위성의 대량 생산 기술, 저궤도의 상대적으로 온화한 우주 방사선 환경 덕분에 활용 가능한 상용 기성품 (Commercial Off-the-Shelf, COTS) 부품이 증가되고 원자시계 소형화와 같은 핵심 기술의 발전이 진행되었다. 이런 이유로 저궤도 위성의 출시시간 (time-to-market)이 단축되었으며, 저궤도 위성의 상대적으로 낮은 발사비용으로 LEO-PNT 시스템 개발이 촉진되고 있다 (Reid et al. 2018, Çelikbilek et al. 2025).
이러한 PNT 분야의 기술적, 산업적 동향은 한국형위성항법시스템인 Korean Positioning System (KPS)의 향후 발전방향에도 중요한 시사점을 제시한다. KPS가 장기적으로 항법시스템으로서의 경쟁력을 유지하고 성능의 고도화를 달성하기 위해서는 LEO-PNT 기술을 통합하는 것이 필수 불가결 해졌다. 현재 개발되고 있는 KPS 시스템을 보강하고 성능을 향상시키기 위한 최적의 LEO-PNT 체계에 대한 연구가 필요하다.
LEO-PNT 기술은 다양한 목적과 구현 형태를 가지고 연구되고 있다 (Eissfeller et al. 2024). 구현 방식 중, 본 연구에서 주목하는 것은 저궤도 보강 GNSS (LEO-Enhanced GNSS, LeGNSS) 방식이다. 이는 기존 Medium‑Earth‑Orbit (MEO) 기반의 GNSS를 보완하고 강화하는 것을 주목적으로 하는 LEO-PNT 아키텍처이다 (Ge et al. 2022). 이 방식의 기본적인 개념은 독립적인 위성항법 시스템으로 저궤도 위성이 단순히 지상 사용자를 위한 새로운 항법 신호를 송출하는 것보다는 기존 GNSS 위성의 신호를 수신하여 자신의 위치를 정확하게 결정함과 동시에, 이 정보를 바탕으로 지상 사용자에게 GNSS와 유사한 새로운 항법 신호를 중계 또는 생성하여 송출하는 것이다. 이런 방식의 저궤도 위성 이용은 기존 GNSS 시스템의 사용자이자 동시에 시스템 구성의 일부로서 기능하는 이중적 역할을 수행하며, 다중 계층 구조를 갖는 GNSS/LEO 통합 항법시스템을 가능하게 한다.
GNSS와 저궤도 위성군을 통합한 저궤도 보강 GNSS 아키텍처는 기존 GNSS의 한계를 극복하고 PNT 서비스의 질을 개선할 수 있으며 기대되는 주요 성능 향상 효과는 다음과 같다.
이상과 같이 저궤도 위성을 기존 GNSS 체계와 연동시키면 여러가지 측면에서 GNSS의 성능을 강화시킬 수 있다. KPS는 지역 위성항법 시스템으로 7~8개의 위성군으로 구성되어 있다 (Kim 2025). 전역 위성항법 시스템에 비해 상대적으로 적은 수의 위성군을 가지고 있기 때문에 상황에 따라 부족한 가시위성 수가 항법성능의 저하를 가져올 수 있으면 이를 해결하기 위한 가장 확실한 방법은 궤도 상에 위성을 더 추가하는 것이고 저궤도에 위성을 추가하는 것이 경제성 등 여러가지 측면에서 장점이 있다. 또한 KPS 시스템은 정밀한 궤도 결정을 위해 국외에 다수의 지상기지국을 배치시켜야 한다. 저궤도 위성군을 우주 상공에 있는 이동기지국으로 배치할 수 있으면 국외에 다수 설치가 필요한 지상기지국을 대치할 수 있다. 이처럼 기존 KPS 시스템에 추가적으로 저궤도 위성군을 포함시키면 KPS 시스템의 한계점들을 효과적으로 극복할 수 있다.
본 논문에서는 KPS 시스템에 저궤도 위성군을 추가하여 LEO Enhanced KPS 시스템을 구성하는 경우에 필요한 최적의 저궤도 위성군 설계를 목표로 한다. KPS/LEO 통합시스템을 통해 얻을 수 있는 여러가지 이득 중에서 본 논문에서는 두가지 성능지표를 개별적으로 고려한다. 첫번째 성능지표는 KPS에 저궤도를 추가하며 발생하는 DOP의 향상이고 두번째는 저궤도 위성을 이동기지국으로 사용해서 얻을 수 있는 KPS 위성 정밀 궤도 결정의 성능개선이다. 일반적으로 더 많은 위성을 사용하면 더 좋은 DOP와 정밀 궤도 결정 성능을 얻을 수 있지만 현실적인 제약에 따라 가능하면 최소한의 저궤도 위성을 사용하며 성능을 최대화할 수 있는 위성군의 설계가 요구된다. 이러한 설계문제는 서로 상충하며 다양한 trade-off를 가질 수 있는 다중목적함수 최적화문제인 파레토 최적화 (Pareto optimization) 문제에 해당한다 (Guan et al. 2020, Çelikbilek et al. 2025).
독립적인 LEO-PNT 시스템을 위한 혹은 저궤도 보강 GNSS를 위한 저궤도 위성군 설계문제에 파레토 최적화 기법이 사용되고 있다 (Çelikbilek et al. 2022). 저궤도 궤도군 최적화 문제는 이산적인 변수, 선형 부등식 제한조건, 복수의 비선형 목적함수를 갖는 파레토 최적화 문제로 이를 위한 해법으로 유전 알고리즘 (Genetic Algorithm, GA)에 기반한 알고리즘들이 사용되고 있다 (Çelikbilek et al. 2025).
2장에서는 저궤도 위성을 통해 개선하고자 하는 KPS/LEO 통합 항법시스템의 성능지표에 대해 설명하고, 3장에서는 궤도 설계에 사용하는 다중 목적함수 최적화 기법에 대해 설명한다. 4장에서는 저궤도 위성군 설계 문제를 다중 목적함수 최적화 문제로 수식화 한다. 5장에서는 유전 알고리즘을 통해 DOP와 정밀 궤도 결정 공분산 Root Sum Square (RSS) 값을 각각 최소화하면서 사용하는 저궤도 위성의 개수도 최소화하도록 저궤도 위성군을 설계하고 그 궤도 파라미터를 제시한다. 그리고 6장에서는 결론을 맺는다.
KPS/LEO 통합 시스템의 성능을 정량적으로 평가하고 최적화의 목적함수로 활용하기 위해, 본 연구에서는 사용자 관점의 성능과 시스템 관점의 성능을 대표하는 두 가지 핵심 지표를 정의한다. 사용자 관점에서는 위성 배치의 기하학적 우수성을 나타내면서 사용자가 얻게 되는 항법정확도를 보여주는 DOP를, 시스템 관점에서는 핵심 인프라인 KPS 위성의 궤도 결정 정확도를 나타내는 정밀 궤도 결정의 공분산값을 사용한다.
DOP는 위성 항법에서 수신기 위치와 가시 위성들의 기하학적 배치 구조가 위치 정확도에 미치는 영향을 나타내는 지수이다. 위성들이 하늘에 넓게 퍼져 있을수록 기하학적 구조가 강하며 DOP 값은 낮아지고, 반대로 위성들이 서로 가깝게 모여 있으면 기하학적 구조가 약해져 DOP 값은 높아진다. KPS 시스템에 저궤도 위성군을 추가하면 가시 위성의 수가 절대적으로 증가하고 다양한 값을 갖는 고도와 방위각의 위성들이 추가되므로, 전반적인 기하학적 구조가 강화되어 DOP 값이 감소하는 효과를 기대할 수 있다. 이는 곧 사용자 위치 정확도의 향상으로 이어진다.
DOP 값은 Eq. (1)과 같이 계산된다:
$$DOP=\sqrt{tr(H^{T}H)^{-1}}, \quad H = \begin{bmatrix} \rho_1^{KPS} & 1 \\ \vdots \\ \rho_m^{KPS} & 1 \\ \rho_1^{LEO} & 1 \\ \vdots \\ \rho_n^{LEO} & 1 \end{bmatrix}$$
여기서 $\rho_i^{KPS}$와 $\rho_j^{LEO}$는 각각 $i-$번째 KPS 위성과 사용자 사이의 단위 시선벡터와 $j-$번째 저궤도 위성과 사용자 사이의 단위 시선벡터를 나타낸다. 최종적인 위치 오차는 DOP 값과 측정 오차의 곱으로 표현되므로, 높은 정확도를 얻기 위해서는 낮은 DOP 값을 유지해야 한다.
DOP는 위성과 사용자 사이의 기하학적인 배치 관계에 의해서 결정되기 때문에 KPS/LEO 통합 항법시스템의 항법성능을 알아보기 위해서는 서비스 대상지역에 고르게 퍼져 있는 지역에서의 DOP 값을 모두 포함하도록 계산해야 한다. 본 논문에서는 하루 동안 한국의 4개 지역 (서울, 부산, 속초, 제주)에서 계산된 DOP 값들의 전체 평균값을 계산하여 최적화를 위한 목적함수로 사용한다. 즉, 기존 KPS 위성군에 저궤도 위성들을 추가로 배치시킬 때 한국지역에서 예상되는 DOP 값을 최소화하는 최적의 위성궤도군 파라미터를 찾는다.
저궤도 위성은 지상 사용자에게 항법 신호를 제공하는 역할 외에, KPS 시스템 자체의 성능을 강화하는 데 핵심적인 역할을 할 수 있다. 저궤도 위성은 우주 공간을 빠르게 이동하는 이동감시국으로 기능할 수 있다. 지상에 고정된 감시국 네트워크에 더해, 저궤도 위성군이 지속적으로 KPS 위성을 관측하여 생성하는 측정값들은 KPS 위성의 궤도를 결정하는 데 매우 유용한 정보를 제공한다. 지상에서는 관측할 수 없는 다양한 기하학적 위치에서 얻어지는 저궤도의 관측 데이터는 궤도 결정의 정확도를 획기적으로 향상시킨다 (Li et al. 2021, Akiyama et al. 2023). Quasi‑Zenith Satellite System (QZSS)의 경우 4~6개의 저궤도 위성군을 추가하였을 때 일본과 일본 근처 지역에 퍼져 있는 지역적인 지상 감시국만을 사용했을 때에 비해 QZSS 위성 정밀 궤도 결정 성능이 약 50% 정도 개선될 수 있음을 시뮬레이션을 통한 연구로 보여주고 있다 (Akiyama et al. 2023). BeiDou Navigation Satellite System (BDS)의 경우에도 다수의 저궤도 위성군을 활용하여 BDS 위성의 정밀 궤도결정 정확도를 향상시키는 방법이 연구되었고 특히, 저궤도 위성에 탑재된 수신기에서 발생할 수 있는 관측 오차를 고려하여 시뮬레이션을 수행하여, 저궤도 위성 수가 증가함에 따라 BDS 위성의 궤도 정확도가 어떻게 향상되는지가 분석되었다 (Li et al. 2021). 위의 연구결과 모두 저궤도 위성 수가 많으면 많을수록 위성 정밀 궤도 결정의 성능이 더 향상되는 것을 보여주고 있다. 저궤도를 이동 감시국으로 이용하여 얻을 수 있는 KPS 위성군의 정밀 궤도 결정 성능의 개선 정도를 궤도결정 최적화 문제의 목적함수로 사용한다. 즉, 지상의 감시국에 우주 상공의 저궤도 감시국을 추가하여 KPS 위성의 정밀 궤도 결정 오차를 최소화하는 궤도군을 설계한다.
정밀 궤도 결정은 위성에 탑재된 수신기가 관측한 GNSS 신호 데이터와 위성에 작용하는 여러 물리적 힘을 정밀하게 모델링한 동역학 모델을 결합하여 위성의 위치와 속도 그리고 정밀모델에 관련된 여러 모델변수들을 함께 추정하는 과정이다 (Tapley et al. 2004). 본 연구에서는 정밀 궤도 결정을 위해 배치 최소자승법 (Batch Least-Squares, BLS)을 사용한다. BLS는 칼만필터와 같은 순차적 필터와 달리, 일정 기간 (data arc) 동안 수집된 모든 관측 데이터를 한 번에 처리하여 상태변수를 추정한다. 이 방식은 계산량이 많지만, 데이터의 이상치를 효과적으로 제거하고 일시적인 데이터 문제에 덜 민감하여, 더 안정적이고 정확한 궤도 해를 산출하는 장점이 있다. 정확한 위성궤도 결정을 위해서는 아주 상세한 위성 동역학 모델뿐만 아니라 GNSS 신호 관측모델도 위성시계 바이어스, 전리층, 대류권 오차, 반송파 위상 등을 모두 상세하게 상태변수에 포함시켜서 추정하여야 한다. 하지만 본 논문의 목적은 위성항법 시스템의 정밀 궤도 결정 성능 자체의 극대화가 아니라 대신, 기존의 지상국 관측망을 보강하는 저궤도 위성군을 어떻게 설계해야 정밀 궤도 결정 성능을 가장 효율적으로 개선할 수 있는지에 대한 최적 설계안을 제시하는 데 있다. 따라서 이 최적화 과정에서는 정밀 궤도 결정의 절대적인 정밀도 수치보다, 다양한 저궤도 위성군 설계에 따른 정밀 궤도 결정 성능의 상대적인 개선 효과를 신뢰성 있게 비교 평가하는 것이 필요하다. 또한 최적화 과정 중에서 요구되는 많은 계산량을 고려할 때 복잡한 모델을 이용한 정밀 궤도 결정은 보다는 간략한 동역학 모델과 측정모델을 사용한 BLS 기반 정밀 궤도 결정을 수행하고 이때 얻게 되는 공분산 행렬을 이용하여 정밀 궤도 결정 성능지표로 사용한다.
위성궤도 결정을 위해 배치 최소자승법을 사용한다. 우선 위성의 동역학 모델은 J2 섭동만을 고려한 단순한 모델로 간주하고 관련 모델 파라미터는 모두 사전에 알고 있다고 가정한다. 측정값은 지상 감시국과 저궤도 위성에서 수신되는 의사거리 측정값으로 이중주파수 Ionosphere‑Free (IF) 조합을 통해 전리층 오차가 모두 제거되고 반송파 평활화를 통해 의사거리 잡음이 감소된 측정값을 사용한다. 저궤도 위성의 위치는 온보드 GNSS 수신기를 통해 실시간으로 정확하게 결정할 수 있다고 가정한다. 이런 경우 상태변수는 모든 KPS 위성의 위치, 속도, 시계 바이어스 그리고 모든 지상 감시국과 저궤도 위성의 시계 바이어스로 구성할 수 있다. 위성궤도 추정문제를 보다 간략화 하기 위하여 지상 감시국과 저궤도 위성의 시각은 모두 KPS 시각에 동기가 되어 있다고 가정하고 또한 저궤도 위성의 위치도 알고 있다고 가정하여 오로지 KPS 위성의 위치, 속도 그리고 시계 바이어스만을 추정하는 문제로 축소시킨다. 또한 배치 최소자승법 문제에서 위성시계 오차는 매 측정 순간에서만 유효하기 때문에 에폭 파라미터 (epoch-parameter)로 분류할 수 있고 이는 파라미터 사전 소거 (pre-elimination) 과정을 통해 소거될 수 있다 (Dach et al. 2015). 최종적으로 KPS 위성궤도 추정 문제를 오로지 위성 위치 및 속도 추정으로 더욱 간략하게 축소시킨다.
본 연구의 목적은 위성의 정밀한 궤도 결정이 아니고 저궤도 위성군 추가에 따른 KPS 위성 정밀 궤도 결정의 성능 개선 정도를 목적함수로 이용한 위성궤도 최적화 설계이기 때문에 설계 대상이 되는 위성궤도 파라미터에 의해 결정되는 위성의 위치와 속도 결정문제로만 정밀 궤도 결정 문제를 국한한다.
위성궤도 계산을 위한 배치 최소자승법 문제는 Eqs. (2, 3)으로 표현할 수 있다.
$$\dot{x}(t)=f(x(t),t), \quad x(t_{0})=x_{0}$$
$$\bar{x}(t_{i})=\int_{t_{0}}^{t_{i}}f(x_{0},t), \quad \frac{d}{dt}\Phi=F(t)\Phi, \quad \Phi(t_{0},t_{0})=I, \quad F=\frac{\partial f}{\partial x}|_{\bar{x}^{(k)}(t)}$$
여기서 $f$는 위성궤도 동역학 모델, $x(t)$는 위성의 위치와 속도로 구성된 상태변수, 그리고 $\Phi(t)$는 동역학 모델로부터 얻어지는 상태 천이행렬이다.
$i-$번째 측정 순간에서의 위성으로부터의 IF 결합 반송파 평활화된 의사거리 측정모델식은 Eq. (4)와 같이 표현된다.
$$y_{i}=h_{i}(x(t_{i}))+G_{i}s_{i}+\epsilon_{i}, \quad \epsilon_{i} \sim \mathcal{N}(0,R_{i})$$
여기서 $y_i$는 $i-$번째 측정 순간에서 지상 기준국 및 저궤도 위성에서 관측된 모든 의사거리 측정값을 벡터로 모은 크기가 $m_i$인 관측값 벡터, $h_i$는 관측모델, $s_i$는 위성시계 오차, $G_i$는 $y_i$가 단일 위성에 대한 측정값이면 $G_i=1_{m_i \times 1}$, 그리고 $\epsilon_i$는 의사거리 측정오차를 나타낸다.
측정값 선형화 모델, 선형화 잔차, 그리고 측정값 자코비언 행렬은 Eqs. (5, 6)과 같이 표현된다.
$$r_i = y_i – h_i(\bar{x}(t_i)) – G_i s_i, \quad H_{x,i} = \left. \frac{\partial h_i}{\partial x} \right|_{x(t_i)}, \quad H_{x,i} = \begin{bmatrix} \rho_i^{MS_1} & 0 \\ \vdots & \vdots \\ \rho_i^{MS_n} & 0 \\ \rho_i^{LEO_1} & 0 \\ \vdots & \vdots \\ \rho_i^{LEO_k} & 0 \end{bmatrix}$$
$$\delta r_{i} \approx r_{i} – H_{i}\Delta x_{0} – G_{i}\Delta s_{i}, \quad H_{i}=H_{x,i}\Phi(t_{i},t_{0})$$
여기서 $\rho_i^{MS_j}$ 와 $\rho_i^{LEO_j}$는 각각 $j-$번째 지상국과 KPS 위성 사이의 단위 시선벡터와 $j-$번째 저궤도 위성과 KPS 위성 사이의 단위 시선벡터를 나타낸다.
일정 기간 (data arc) 기간 동안의 모든 데이터를 한꺼번에 배치 처리하면 궤도 초기상태에 대한 최소자승 정규방정식 (normal equation)은 다음과 같이 얻어진다. 이때 측정 순간의 위성시계오차는 사전에 제거하여 위성궤도 초기상태만에 대한 축소 정규방정식을 구성하기 위하여 Eq. (7)과 같이 행렬을 정의한다.
$$N_{xx}=\Sigma_{i}H_{i}^{T}W_{i}H_{i}, \quad n_{i}=G_{i}^{T}W_{i}G_{i}, \quad W_{i}=R_{i}^{-1}$$
매 측정 순간의 위성시계 오차항이 소거된 위성궤도 초기상태만의 축소 정규방정식은 Eqs. (8-10)과 같이 표현된다.
$$\widetilde{N_{xx}}\Delta x_{0}=\widetilde{b_{x}}$$
$$\widetilde{N_{xx}}=\Sigma_{i}H_{i}^{T}W_{i}H_{i}-H_{i}^{T}W_{i}G_{i}n_{i}^{-1}G_{i}^{T}W_{i}H_{i}$$
$$\widetilde{b_{x}}=\Sigma_{i}H_{i}^{T}W_{i}r_{i}-H_{i}^{T}W_{i}G_{i}n_{i}^{-1}G_{i}^{T}W_{i}r_{i}$$
배치 최소자승법에 의한 초기상태벡터의 해와 사후 공분산은 Eqs. (11, 12)와 같다.
$$\Delta x_{0}=\widetilde{N_{xx}^{-1}}\widetilde{b_{x}}$$
$$P_{x_{0}}=\widetilde{\sigma_0^2} \widetilde{N_{xx}^{-1}}$$
Eq. (12)의 공분산 $P_{x_0}$ 행렬은 추정된 KPS 위성 궤도의 정확도를 나타내는 핵심 지표이다. 하루 동안의 관측 데이터를 이용하여 KPS 위성들의 궤도를 배치 최소자승 방식으로 추정하고, 이때 계산된 $P_{x_0}$ 행렬의 대각 성분(각 위치 및 속도 성분의 분산)중 위치에 해당하는 성분들의 RSS 값을 성능지표로 계산한다. Eqs. (5, 6, 9) 그리고 Eq. (10)에서 볼 수 있는 것처럼 궤도추정의 공분산 값은 관측 기간 동안 누적된 $H_i$ 값에 의해서 주로 결정되는 것을 알 수 있다. $H_i$는 Eq. (6)에서 정의된 것처럼 특정 순간에서 위성을 바라보는 시선각 벡터가 초기 순간부터 $i-$순간까지 사이의 상태천이 행렬과 곱해진 값이다. 즉, 위성의 초기 위치를 지상 감시국과 저궤도 위성이 각각 $i-$순간의 위치에서 바라본 시선각 벡터에 해당하는 값이라고 생각할 수 있다. 이런 이유로 관측 기간 내에 KPS 위성을 동시에 많은 지상의 감시국과 여기에 추가하여 저궤도 위성에서도 관측할 수 있다면 더 작은 공분산 값을 가질 수 있음을 예상할 수 있다.
앞에서 확인한 것처럼 저궤도 위성군을 KPS 시스템에 추가하여 DOP 또는 정밀 궤도 결정 공분산 값을 작게 하여 시스템의 성능을 개선하는 가장 직접적인 방법은 저궤도 위성의 수를 늘리는 것이다. 그러나 위성 제작 및 발사 그리고 운영에 수반되는 비용과 같은 현실적인 제약을 고려할 때, 위성 수를 늘리는 것에는 한계가 있다. 따라서 제한된 자원 내에서 최대의 성능 향상을 이끌어내기 위해서는, 단순히 위성 수를 늘리는 것을 넘어 성능과 비용(위성 수)이라는 상충하는 목표들을 동시에 고려하여 최적의 위성군을 설계하는 과정이 필수적이다. 이를 위해 본 연구에서는 서로 상충하는 복수의 목적함수를 동시에 최적화하는 다중 목적함수 최적화 (Multi-Objective Optimization, MOO) 기법을 저궤도 위성군 설계 문제에 적용한다.
다중 목적함수 최적화는 파레토 최적화라고도 불리며, 둘 이상의 상충하는 목적함수를 동시에 최적화해야 하는 문제들을 다루는 분야이다. 예를 들어, 위성군 설계에서 ‘최소의 위성 수’라는 비용 목표와 ‘최소의 DOP’라는 성능 목표는 대표적인 상충 관계에 있다. 위성 수를 줄이면 비용은 감소하지만 DOP 성능은 저하되고, 반대로 DOP 성능을 높이려면 더 많은 위성이 필요하여 비용이 증가한다.
이러한 문제에서는 모든 목적함수를 동시에 최적으로 만드는 단일 해 (single solution)가 존재하지 않는 것이 일반적이다. 따라서 다중 목적함수 최적화의 목표는 어느 한 목적함수를 개선하기 위해서는 반드시 다른 하나 이상의 목적함수가 저하될 수밖에 없는 ‘최적의 절충안 (trade-off)’들의 집합을 찾는 것이다 (Cuate & Schutze 2020).
다중 목적함수 최적화 문제의 해를 평가하기 위해 파레토 지배 (Pareto dominance)라는 개념이 사용된다. 하나의 해 $\mathbf{x_1}$이 다른 해 $\mathbf{x_2}$에 비해 모든 목적함수에서 성능이 같거나 더 우수하면서, 동시에 최소한 하나의 목적함수에서는 성능이 명백히 더 우수할 때, “$\mathbf{x_1}$이 $\mathbf{x_2}$를 지배한다”라고 말한다. 만약 어떤 해도 특정해 $\mathbf{x^\ast}$를 지배하지 못한다면, $\mathbf{x^\ast}$를 파레토 최적해 (Pareto optimal solution) 또는 비지배해 (non-dominated solution)라고 부른다.
이러한 파레토 최적해들을 목적함수 공간에 표시한 집합을 파레토 전선 (Pareto front)이라고 한다. 파레토 전선은 주어진 문제에서 달성 가능한 최적의 성능 조합들을 나타내는 경계선으로, 이 선상에 있는 모든 해들은 수학적으로 동등하게 최적이다.
파레토 전선은 무수히 많은 최적해를 포함할 수 있으므로, 최종적으로 의사결정자는 이 중에서 하나의 해를 선택해야 한다. 이때 특별한 선호 정보가 없다면, 무릎점 (knee point)이 가장 합리적인 선택지로 간주된다. 무릎점은 파레토 전선에서 곡률이 가장 큰 지점으로, 한 목적함수의 성능을 약간만 개선하려 해도 다른 목적함수의 성능이 급격히 나빠지는 지점을 의미한다 (Cuate & Schutze 2020). 즉, 무릎점은 가격 대비 성능비가 가장 좋은 지점으로, 최소의 희생으로 최대의 효과를 얻을 수 있는 균형점을 나타내며 선호될 가능성이 높은 해로 간주된다.
위성군 설계 분야에 최적화 기법들이 많이 사용되고 있다. 몬테카를로, 유전 알고리즘, 시뮬레이티드 어닐링 (simulated annealing) 등의 방법들이 대표적인 기법이다 (Çelikbilek et al. 2022). 이중 GA는 진화 알고리즘의 한 종류로 유전 조작인 크로스오버, 돌연변이, 그리고 선택과 같은 작업을 통해 최적화 문제의 해를 찾는 알고리즘이다. 이를 다중목적함수 최적화로 확장한 것이 다중목적함수 진화 알고리즘 (Multi-Objective Genetic Algorithms, MOGA)이고 여기에 특별한 선택기준이 적용된 것이 비지배 정렬 유전 알고리즘 II (Non-dominated Sorting Genetic Algorithm II, NSGA-II)이다 (Deb et al. 2002, Deb 2011).
본 연구에서는 MOGA 중에서 위성궤도설계 문제에 적용되어 좋은 결과를 보여주고 있는 NSGA-II를 최적화 도구로 선택한다 (Çelikbilek et al. 2022, Teng et al. 2023, Xue et al. 2024). NSGA-II는 다음과 같은 두 가지 핵심 메커니즘을 통해 파레토 최적해를 효율적으로 탐색한다.
NSGA-II 알고리즘을 통해 저궤도 위성 수와 DOP 혹은 정밀 궤도 결정 공분산 값 사이의 최적의 상충관계를 나타내는 파레토 전선을 찾고, 그 위에서 가장 균형 잡힌 해인 무릎점을 식별하기 위해 프론트 전체를 탐색한다.
다중 목적함수 최적화 기법을 KPS 성능 보강을 위한 저궤도 위성군 설계 문제에 구체적으로 적용한다. NSGA-II 알고리즘을 사용하여, 가능한 적은 수의 저궤도 위성을 배치하여 KPS/LEO 시스템의 DOP 성능 그리고 KPS 위성의 정밀 궤도 결정 성능을 최대화하는 최적의 저궤도 위성군 파라미터를 탐색한다.
DOP는 사용자 위치에서 결정되는 것이기 때문에 국내 5곳에서 계산되는 DOP 값의 하루 동안의 평균값을 최적화의 첫번째 목적함수로 한다. 동시에 배치하는 저궤도 위성의 총합을 가능하면 줄이고 싶기 때문에 위성의 총합을 두번째 목적함수로 한다. 여기에 추가로 위성의 고도를 세번째 목적함수로 한다. 위성의 고도는 발사비용 등을 고려하기 위한 면도 있지만 위성 배치 고도에 따른 다양한 위성군 선택의 트레이드오프를 알아보기 위한 측면도 있다.
세 목적함수 모두 배치되는 저궤도 위성군에 의해 결정되므로 최적화 문제의 설계 파라미터는 위성의 궤도를 결정짓는 케플러 파라미터이다. 하지만 개별 위성에 대한 케플러 파라미터를 모두 최적화 파라미터로 설정하는 경우 최적화 문제의 차수가 너무 커지는 문제가 발생한다. 몇 가지 가정과 설정을 통해 위성 궤도 관련 파라미터를 줄인다. 우선 위성군은 일반적으로 위성 궤도군 설계에서 많이 사용하는 Walker 궤도로 설정한다. Walker 궤도는 궤도 경사각, 총 위성수, 궤도면 수, 위상차 파라미터의 4개의 핵심 파라미터로 정의되며 추가로 위성 궤도군 배치 토폴로지에 따라 Walker Delta 혹은 Walker Star로 정의된다. Walker 궤도 내의 위성들은 모두 고도가 같다고 가정하고 고도가 다른 위성군의 사용을 고려하기 위하여 두 개의 위성군 사용까지 가정한다. 이렇게 설정하면 위성 궤도 설계를 위한 파라미터는 Eq. (13)과 같이 총 10개로 정의된다.
$$x \triangleq [T_1 \quad P_1 \quad h_1 \quad i_1 \quad Tp_1 \quad T_2 \quad P_2 \quad h_2 \quad i_2 \quad Tp_2]$$
여기서 $h_i$는 고도, $i_i$는 경사각, $T_i$는 위성수, $P_i$는 궤도면 수, $Tp_i$는 토폴로지를 각각 의미한다. 세개의 목적함수로 이루어진 다중 목적함수는 Eq. (14)와 같이 정의된다.
$$f(\mathbf{x}) = \begin{bmatrix} f_1(\mathbf{x}) \\ f_2(\mathbf{x}) \\ f_3(\mathbf{x}) \end{bmatrix} = \begin{bmatrix} f_{DOP}(\mathbf{x}) \\ T_1 + T_2 \\ (h_1T_1 + h_2T_2)/(T_1 + T_2) \end{bmatrix} = \begin{bmatrix} f_{DOP}(\mathbf{x}) \\ x_1 + x_6 \\ (x_1x_3 + x_6x_8)/(x_1 + x_6) \end{bmatrix}$$
여기서 $f_{DOP} (\mathbf{x})$은 Eq. (1)을 이용하여 계산되며 위치 정확도의 척도인 Position Dilution of Precision (PDOP)을 사용한다.
설계 파라미터에 대해서는 현실적인 상황을 고려해서 다음과 같은 제약을 둔다. 우선 위성의 고도는 저궤도에 해당하는 500~1500 km 범위로 제한한다. 저궤도 위성의 총수는 수백 개까지도 고려할 수 있으나 48개 이내로 한정한다. 궤도면은 최대 5개까지로 하고 경사각은 50° ~ 90° 사이로 한정한다. 위성 수와 궤도면 수 그리고 토폴로지는 자연수 값을 갖는다. 위의 궤도설계 문제는 제한 조건을 가진 최적화 문제로 Eqs. (15-18)과 같이 수식화 된다.
$$\min_{\mathbf{x}}f(\mathbf{x})=\min_{\mathbf{x}}\begin{bmatrix} PDOP(\mathbf{x}) \\ T_{1}+T_{2} \\ (h_{1}T_{1}+h_{2}T_{2})/(T_{1}+T_{2}) \end{bmatrix}$$
$$0 \le T_i \le 48, \ 1 \le P_i \le 5, \ 0.5 \le h_i \le 1.5, \ 50 \le i_i \le 90, \ 1 \le Tp_i \le 2$$
$$1 \le T_{1}+T_{2} \le 48$$
$$T_{i}, P_{i}, Tp_{i} \in \mathbb{Z}$$
여기서, 토폴로지 값 $Tp_i$가 1이면 Walker Delta, 2이면 Walker Star를 선택하도록 한다. 위성의 고도 단위는 megameter (Mm)로 설정해서 각 목적함수 값 크기의 차수를 서로 비슷하게 한다. 각 파라미터별 제한조건은 궤도 설계 시 고려한 상황에 맞춰 값이 설정된다. 이상과 같이, 궤도설계 문제는 최적화 변수에 하한과 상한, 선형 부등식, 그리고 정수 조건 제약이 있는 최적화 문제로 설정된다. NSGA-II 알고리즘은 이러한 형태의 변수 제한조건이 있는 문제에 잘 적용될 수 있다.
이 목적함수들을 최적화하기 위해서는 저궤도 위성들이 가능한 한 국내 상공에 넓게 분포하여 사용자에게 좋은 기하학적 배치를 제공해야 한다. 이는 위성군의 궤도 경사각, 고도, 위성 수 및 위상 배치에 직접적으로 영향을 받는다. 예를 들어, 특정 경사각을 가진 위성은 다른 경사각의 위성보다 국내 지역을 더 자주, 더 높은 고도각으로 통과할 수 있어 DOP 성능에 유리할 수 있다. NSGA-II 알고리즘을 이용한 최적화 과정은 이러한 복잡한 관계를 고려하여, DOP를 최소화하며 동시에 위성의 총 수를 최소화할 수 있는 궤도 파라미터의 조합들을 효율적으로 탐색하여 서로 상충하는 3개의 목적함수에 대한 파레토 최적해들을 찾아서 3차원 파레토 전선를 만들어낸다.
KPS 시스템 자체의 안정성과 정확성을 결정하는 중요 요소 중의 하나인 KPS 위성의 궤도 정보 정밀도를 저궤도 위성군을 추가하여 향상시키는 문제이다. 이는 2.2절에서 정의한 바와 같이, 저궤도 위성군의 하루 동안 관측 데이터를 포함하여 배치 최소자승법 방식으로 계산된 KPS 위성 궤도의 사후 공분산을 최소화하는 것으로 Eq. (19)와 같이 수식화 된다.
$$\min_{\mathbf{x}}f(\mathbf{x})=\min_{\mathbf{x}}\begin{bmatrix} f_{RSSP_{x0}}(\mathbf{x}) \\ T_{1}+T_{2} \\ (h_{1}T_{1}+h_{2}T_{2})/(T_{1}+T_{2}) \end{bmatrix}$$
설계 파라미터는 Eq. (13)와 동일하며 제한조건들도 Eqs. (16-18)과 동일하다. $f_{RSS_{P_{x0}}} (\mathbf{x})$는 Eq. (12)에 정의된 위성궤도 추정의 사후 공분산 값의 RSS 값이다.
이 목적함수를 최적화하기 위해서는 저궤도 위성들이 KPS 위성들을 가장 효과적으로 관측할 수 있는 위치에 있어야 한다. 이는 KPS 위성과 저궤도 위성 간의 상대적인 기하학적 배치가 중요함을 의미하며 전 지구적으로 분포된 저궤도 위성들이 다양한 각도에서 KPS 위성들을 빠르게 이동하며 지속적으로 추적할 때 정밀 궤도 결정 성능이 향상될 수 있다. 이 점이 바로 지상에 고정되어 배치되어 있는 지상 감시국들과는 다른 점이다. DOP 최적화 문제와 마찬가지로 NSGA-II 알고리즘을 이용하여 제한조건들이 있는 10개의 궤도 파라미터들을 효율적으로 탐색하여 3차원 목적함수 공간에서 서로 상충하는 요구사항을 만족시키는 파레토 전선을 생성해낸다.
위에서 구체화된 최적설계 문제를 NSGA-II 알고리즘을 통해 해결한 결과를 보인다.
Eqs. (16-18)에서 설정한 제약조건을 만족시키는 Eq. (15) 최적화 문제의 3차원 파레토 전선이 Fig. 1에 보인다. 총 위성 수, DOP 값, 그리고 위성 고도의 3차원 공간에서 아래 왼쪽 방향으로 휘어진 띠가 수직으로 세워져 있는 모양이다. 총 위성수와 DOP의 값 사이에는 전형적인 상충관계 즉, 위성의 수를 늘리면 DOP가 감소하고 위성의 수를 줄이면 DOP가 증가하는 관계를 보인다. 반면 고도 쪽으로는 상충관계 보다는 특정한 방향으로의 증가 혹은 감소 경향을 보인다. Fig. 2는 3차원 파레토 전선을 2차원 공간에 투영한 결과로 고도 성분은 색깔로 구분하여서 표시하였다.
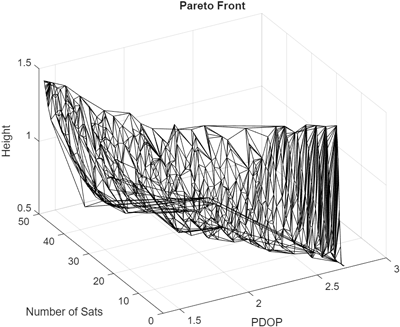
Fig. 1. 3D Pareto front (PDOP).
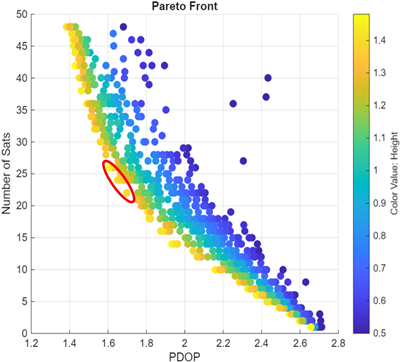
Fig. 2. 2D Pareto front (PDOP).
Fig. 2에 붉은색 타원으로 표시한 곳이 파레토 전선 중에 무릎점에 해당하는 부분이다. 궤도 설계 입장에서 본다면 위성 수 증가에 따른 PDOP 향상 효과의 정도를 가장 크게 볼 수 있는 효율적인 곳이다. 즉, 20~25개 정도의 저궤도 위성군을 배치해서, 현재 2.75 정도의 값을 보이고 있는 KPS 위성 만으로의 PDOP 성능을 1.6 ~ 1.7 정도까지 약 40% 향상시킬 수 있음을 보인다. 48개의 위성을 배치해서는 약 1.4 정도의 PDOP 값을 얻을 수 있고 이는 위성의 수를 24개에서 48개로 두배로 늘렸지만 PDOP은 12.5% 정도만 개선된다는 것을 보여준다. 위성 수의 제한을 현재의 48개 보다 더 늘려서 파레토 전선을 구해보면 현재 보다 더 왼쪽 위로 늘어나는 형태를 가질 것이다. 하지만 위성 수의 증가에 따른 PDOP의 개선률은 감소된다.
위성 고도와 관련돼서는 다음과 같은 사실을 확인할 수 있다. PDOP를 특정한 값으로 고정하고 예를 들어 2로 설정하고 이 값을 얻기 위한 최적 해들을 살펴보면 위성 수와 고도의 조합에 따른 많은 가능한 선택들이 있음을 보인다. 높은 고도를 갖는 위성들을 이용하면 적은 수의 위성들로 원하는 PDOP을 얻을 수 있고 낮은 고도의 위성을 이용하면 많은 수의 위성을 사용해야 함을 알 수 있다. 사용하고 하는 위성 수를 특정하고 이에 따라 얻을 수 있는 PDOP를 보면 높은 고도의 위성을 이용하면 적은 PDOP를 얻을 수 있고 낮은 궤도의 위성을 이용하면 PDOP이 커지는 것을 볼 수 있다.
예상한 것처럼 세가지 척도를 모두 최소화하는 전역 최적 값은 존재하지 않고 구해진 파레토 전선을 참조해서 궤도 설계의 목적과 방향에 따른 최선의 선택을 할 수 있다. Table 1에 위에서 언급한 궤도 설계 선택에 따른 궤도 파라미터들을 표시하였다. 우선 파레토 전선 상에서 가장 최선의 선택이라고 생각할 수 있는 위성의 개수가 24개인 경우를 살펴보자. 선택된 위성군은 단일군으로 위성의 고도는 1,414 km, 궤도면 2개에 각각 12개씩 배치되고 경사각은 60.6도인 Walker Delta 궤도군으로 이때 PDOP은 1.65이다. 고도가 다른 2개의 궤도군까지도 고려했지만 위성의 총 수가 24인 경우의 최적해는 단일 궤도군이다. 또한 많은 궤도면 보다는 소수의 궤도면에 많은 수의 위성을 배치하는 것이 동일한 PDOP을 얻는 최적의 설계가 됨을 알 수 있다. 위성 수가 25인 경우, 단일군으로 5개의 궤도면에 5개의 위성이 배치되는 경우도 파레토 최적해가 될 것 같지만 24의 위성군처럼 2개의 궤도면에 각각 12개씩 위성을 배치하고 하나의 위성은 고도가 다른 곳에 배치하는 것이 PDOP를 최소화하는 최적해로 나타났다. 위성 수가 48개인 경우에는 고도 1,444 km, 4개의 궤도면에 각각 12개 위성, 그리고 경사각 62.4도인 Walker Delta 궤도가 최선의 파레토 최적해이다. 모든 경우에 공통적으로 경사각 60도 내외, Walker Delta, 궤도 상의 위성 수 보다 훨씬 적은 수의 궤도면, 그리고 1,400 km 부근의 높은 고도 값을 갖는 것이 최적해가 되는 것을 볼 수 있다. 이 궤도 파라미터 값들이 향후 DOP 향상을 위한 저궤도 위성 설계에 유용한 출발점으로 사용될 수 있을 것이다.
Table 1. Constellation design: PDOP.
| Num of sats | PDOP | Height (km) | Num of plane | Num of Sat/Plane | Inclination (deg) | Type |
|---|---|---|---|---|---|---|
| 22 | 1.70 | 1396 | 2 | 11 | 63.36 | WalkerDelta |
| 23 | 1.78 | 987 | 1 | 1 | 59.05 | WalkerDelta |
| 1167 | 2 | 11 | 56.72 | WalkerDelta | ||
| 24 | 1.65 | 1414 | 2 | 12 | 60.60 | WalkerDelta |
| 25 | 1.67 | 1348 | 2 | 12 | 60.39 | WalkerDelta |
| 938 | 1 | 1 | 58.38 | WalkerDelta | ||
| 26 | 1.61 | 1469 | 2 | 13 | 60.33 | WalkerDelta |
| 48 | 1.38 | 1444 | 4 | 12 | 62.38 | WalkerDelta |
Table 1의 24개와 48개 위성 궤도군을 갖는 경우의 KPS/LEO 통합 시스템의 서울 지역에서의 하루 동안 PDOP의 변화를 Fig. 3에 표시하였다. 저궤도 위성의 빠른 기하학적인 변화 때문에 PDOP이 매우 빠르게 변화하는 것을 볼 수 있다. 이에 대처하기 위해서는 칼만필터 같은 동적필터를 사용하여 항법해를 계산하는 것이 필요하다. 최적화 과정에서 고려하지 않았던, 48개 위성보다 많은 위성 수를 갖는 경우의 PDOP를 알아보기 위하여 48개 위성의 경우와 동일한 단일군 궤도 설정에서 위성 수와 궤도군을 각각 2배로 했을 때의 PDOP의 변화를 Fig. 3에 함께 표시하였다. 위성 수 증가에 따라 PDOP 값은 감소하고 PDOP의 변화율은 떠 빨라지는 것을 알 수 있다. 하지만 위성 수 증가에 따른 PDOP의 감소 효과는 덜해지는 것을 알 수 있다.
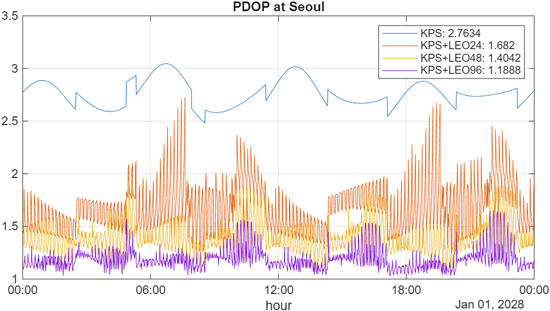
Fig. 3. Changes in KPS/LEO PDOP in Seoul. PDOP calculated every minute.
저궤도 위성 추가에 따른 PDOP의 변화율을 주파수 영역에서 확인하기 위해 PDOP의 주파수 스펙트럼을 구해보면 Fig. 4와 같다. 먼저 KPS 위성의 경우 대략 14시간 정도의 주기를 가지고 변화하는 것을 보이고 있다. 여기에 저궤도 위성군이 추가되는 경우 개별 위성들의 궤도 주기와 가시 위성들과의 시선각 벡터 조합에 의해서 PDOP이 1.7 mHz 정도의 주파수 성분, 대략 10분 정도의 주기를 가지고 있는 것을 수 있다. 저궤도 위성의 숫자가 많아 질수록 PDOP의 값만이 아니라 PDOP의 변화율도 작아져서 점점 점진적인 PDOP 변화를 얻을 수 있다.
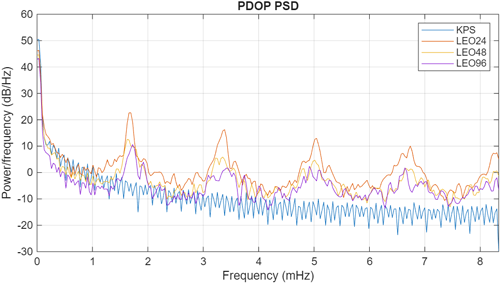
Fig. 4. Power spectral density of KPS/LEO PDOP in Seoul.
실제 궤도 설계를 결정할 때, Fig. 2의 파레토 최적해 전선을 참조하여 목표하는 PDOP 정해지면 거기에 해당하는 파레토 전선 상의 해들을 중심으로 궤도를 결정할 수 있고, 고도가 우선적으로 설정이 되면 고도 조건을 만족하는 해들을 찾아서 궤도를 결정할 수 있다. 비용 대비 DOP 감소 효과라는 측면으로 판단한다면 가장 효율적으로 생각되는 24개의 위성군을 선택할 수 있다.
KPS 위성의 정밀 궤도 결정을 위해서, 지상에 설치하는 감시국의 배치를 Fig. 5와 같이 가정한다. 한반도를 중심으로 운영하는 KPS 위성군을, 최대한 넓게 분포하면서 관측할 수 있는 곳에 감시국을 배치한다. 시뮬레이션에서 감시국을 4개만 사용할 때는 노란색 표시한 곳을 사용하고 5개인 경우에는 갈색으로 표시한 곳, 그리고 11개인 경우에는 파란색으로 표시한 곳이 추가된다. 국내 감시국은 한 곳에만 배치하였다. 감시국에서 매 2분마다 하루 동안 관측된 데이터를 후처리 방식으로 배치 최소자승법을 통해 궤도를 추정하고 Eq. (12)의 공분산을 계산하였다. 저궤도 위성에서 측정된 데이터도 위성의 다운링크를 통해 모두 전송되어 후처리 추정에 사용되었다고 가정하였다.
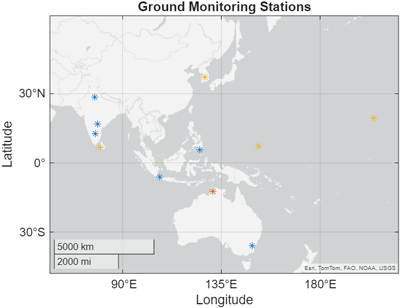
Fig. 5. Ground monitoring station locations used for simulation.
우선 지상 감시국만을 이용한 KPS 위성군의 정밀 궤도 결정 성능은 Table 2와 같다. 여기서 공분산 RSS 값의 절대적인 크기 보다는 지상국의 수가 늘어남에 따라 이 값이 어떻게 감소하는 가에 주목하도록 한다. 왜냐하면 절대적인 값은 앞에서 설명한 정밀 궤도 결정 문제에서 설정한 오차 값들에 따라 달라질 수 있기 때문이다. 지상국의 수가 4개에서부터 늘어 감에 따라 RSS 값이 감소하는 것을 볼 수 있는데 11개로 늘어나게 되면 55%까지 개선되어 1.75 m 정도의 값을 갖는다.
Table 2. POD RSS(P) with ground stations only.
| Number of ground station | 4 | 5 | 11 |
|---|---|---|---|
| RSS P (m) | 3.89 | 2.87 | 1.75 |
저궤도 위성군을 추가한 Eq. (19) 최적화 문제의 3차원 파레토 전선이 Fig. 6에 보인다. 앞의 경우와 유사하게 공분산 RSS-위성 총수 평면에서 왼쪽 아래 방향으로 휘어진 띠가 고도 쪽으로 수직으로 서있는 형태이다. 2차원 평면으로 투영해서 고도를 색깔로 표시하면 Fig. 7처럼 보인다. 공분산과 위성 총수 사이에서는 전형적인 상충관계가 보이고 가장 곡률이 높은 무릎점은 대략 저궤도 위성 수가 6~8개에 해당하는 지점으로 Fig. 7에 붉은색 타원에 해당하는 지점이다. DOP와 마찬가지로 저궤도 위성 수가 많아 지면 많아 질수록 공분산 값은 작아지지만 저궤도 위성의 수를 증가시킬 수 만은 없기 때문에 적절한 선에서 트레이드오프가 필요하다. 앞의 DOP의 경우 와는 달리 6~8개의 적은 위성 수에서 위성 수 대비 공분산 개선 효과가 가장 높은 결과가 나왔다. Table 3에 이 경우의 궤도 파라미터가 보인다. DOP의 경우와는 달리, 더 많은 궤도면에 위성을 배치하는 결과가 나왔다. 이것은 저궤도 위성이 KPS 위성을 더 넓은 각도에서 바라보는 것이 정밀 궤도 결정에 더 유리하기 때문이다.
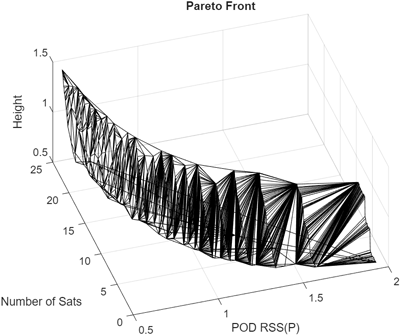
Fig. 6. 3D Pareto front (POD: 5 ground station).
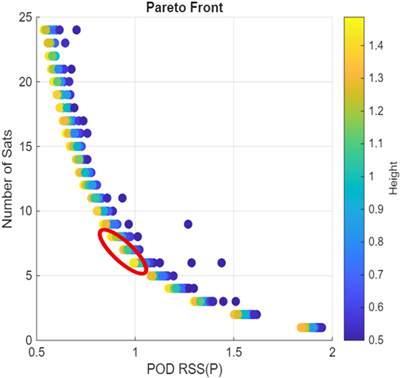
Fig. 7. 2D Pareto front (POD: 5 ground station).
Table 3. Constellation design: POD RSS(P) (5 ground stations).
| Num of sats | RSS P (m) | Height (km) | Num of plane | Num of Sat/Plane | Inclination (deg) | Type |
|---|---|---|---|---|---|---|
| 6 | 0.99 | 1479 | 3 | 2 | 69.97 | WalkerDelta |
| 7 | 0.94 | 1261 | 1 | 1 | 75.92 | WalkerDelta |
| 1453 | 3 | 2 | 64.56 | WalkerDelta | ||
| 8 | 0.88 | 1487 | 4 | 2 | 63.70 | WalkerDelta |
| 24 | 0.54 | 1446 | 4 | 6 | 64.20 | WalkerDelta |
Fig. 2에 따르면 5개 지상국에 6개의 지상국을 추가하여 11개의 지상국을 사용하면 39%의 정밀 궤도 결정 성능개선을 얻게 된다. 하지만 6개의 저궤도 위성을 고도 1,479 km, 3개의 궤도면, 궤도면 당 2개의 위성, 경사각 70도를 갖는 Walker Delta 궤도군으로 배치하면 공분산의 RSS 값이 5개의 지상 감시국만을 사용할 때와 비교해서 2.87 m에서 0.99 m로 65%까지 성능이 개선된다. 지상 감시국 대신 동수의 저궤도 위성군을 이용해서 1.7배의 정밀 궤도 결정 성능개선 효과를 얻었다. 이것은 기존 5개의 지상 감시국에 추가로 많은 수의 국외 지상국을 설치하는 것 보다 6-8개 정도의 저궤도 위성군을 이용하여 더 나은 정밀 궤도 결정 성능을 얻을 수 있음을 보여주고 있다. 최적화를 통해 설계된 6개의 저궤도 위성군에 대한 케플러 파라미터는 Table 4와 같다. 24개의 위성을 사용하는 경우 81%까지 성능 개선을 달성할 수 있다.
Table 4. Orbital parameters for 6 satellites: POD RSS (5 ground station).
| Sat ID | $a$ (km) | $e$ | $i$ (deg) | $\Omega$ (deg) | $\omega$ (deg) | $\nu$ (deg) |
|---|---|---|---|---|---|---|
| 1 | 7857 | 0 | 70 | 0 | 0 | 0 |
| 2 | 7857 | 0 | 70 | 0 | 0 | 180 |
| 3 | 7857 | 0 | 70 | 120 | 0 | 60 |
| 4 | 7857 | 0 | 70 | 120 | 0 | 240 |
| 5 | 7857 | 0 | 70 | 240 | 0 | 120 |
| 6 | 7857 | 0 | 70 | 240 | 0 | 300 |
Fig. 7의 2차원 파레토 전선을 이용해서 위성 궤도 설계의 자유도를 얻을 수 있다. 예를 들어 RSS 값을 1로 맞추는 설계를 하고자 할 경우, Fig. 7에서 RSS = 1에 해당하는 수직선과 파레토 전선이 교차점에서 몇 가지 선택을 할 수 있다. 위성의 수가 6인 경우는 고도가 1,400 km, 7인 경우는 700 km, 8인 경우는 500 km 정도에 해당하는 궤도 후보 중에서 설계 목적에 적합한 궤도를 선택할 수 있다. 위성 수를 먼저 제한하는 경우에는 예를 위성 수를 6개로 제한한 경우에는 Fig. 7에서 위성의 수가 6인 점들의 집합인 수평선 중에서 선택할 수 있다. 이 경우에는 선택하는 고도에 따라 RSS 값이 1에서 1.44까지의 크기를 갖는 궤도를 선택할 수 있다.
지상 인프라의 대외 의존성을 줄이기 위해서 지상 감시국을 국외가 아닌 국내에만 설치하는 문제를 생각해보자. 국토 면적의 제한에 의해 국내 감시국만을 이용해서는 KPS 위성 정밀 궤도 결정을 위한 위성 관측 정보가 절대적으로 부족하다. 저궤도 위성을 이용해서 이 문제를 해결할 수 있다. 지상 감시국이 국내 한 곳에만 있는 경우에 대한 파레토 전선은 Fig. 8에서 볼 수 있다. 지상 감시국 5개인 경우와 유사한 형태를 보이고 있으나 동일한 RSS 값을 갖기 위해서는 위성 수가 1~2개 정도 더 많아야 하는 것을 볼 수 있다. Table 5에 가장 효율적인 선택이 될 수 있는 변곡점 근처의 최적해들을 정리하였다. 이 중 6개의 위성, 고도 1,449 km, 궤도면 3개, 궤도면 당 위성 수 2개, 경사각 63도인 Walker Delta 궤도군의 경우 국내 지상 감시국 하나 만을 가지고도 5개의 국내외 지상 감시국을 이용하는 경우에 비해 62%의 성능 개선을 보인다. 국내 지상 감시국에 6~10기의 저궤도 위성을 우주 이동 감시국으로 추가 운용하면, 여러 국외 지상 감시국을 운용하는 것보다 인프라 운영 안정성을 높이면서 동시에 더 우수한 정밀 궤도 결정 성능을 기대할 수 있다.
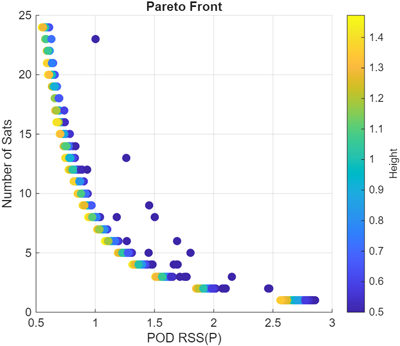
Fig. 8. 2D Pareto front (POD: 1 domestic ground station).
Table 5. Constellation design: POD RSS(P) (1 domestic ground station).
| Num of sats | RSS P (m) | Height (km) | Num of plane | Num of Sat/Plane | Inclination (deg) | Type |
|---|---|---|---|---|---|---|
| 6 | 1.08 | 1449 | 3 | 2 | 63.03 | WalkerDelta |
| 7 | 1.01 | 1355 | 1 | 1 | 60.58 | WalkerDelta |
| 1436 | 3 | 2 | 58.19 | WalkerDelta | ||
| 8 | 0.94 | 1458 | 4 | 2 | 61.34 | WalkerDelta |
| 9 | 0.89 | 1456 | 3 | 3 | 64.40 | WalkerDelta |
| 10 | 0.85 | 1356 | 1 | 1 | 55.27 | WalkerDelta |
| 1414 | 3 | 3 | 63.10 | WalkerDelta |
본 연구에서는 KPS의 성능 강화를 위해 저궤도 위성군을 구축할 때 필요한 궤도 설계 방안을 다루었다. 상충하는 다수의 성능 목표를 동시에 고려하여 최적의 위성군을 설계하기 위한 다중 목적함수 최적화 기반 프레임워크를 제안하였다. 사용자 관점의 성능 지표인 DOP와 시스템 관점의 성능 지표인 KPS 위성의 정밀 궤도 결정 공분산을 저궤도 위성군 궤도 설계 문제의 성능지표로 설정하였다. 두 성능지표 값 모두 저궤도 위성의 개수가 커짐에 따라 작아지기 때문에 저궤도 위성의 개수를 최소화하면서 성능을 최대화하는 문제는 서로 상충한다. 저궤도 위성의 개수, DOP 혹은 정밀 궤도 결정 공분산, 그리고 구축 비용을 고려한 위성고도의 세가지 서로 상충하는 목적함수를 동시에 최소화하는 문제를 유전 알고리즘 기반 다중 목적함수 최적화 알고리즘인 NSGA-II를 사용하여 해결하였다.
최적화 과정을 통해, 세 목적함수 간의 최적 트레이드오프 관계를 나타내는 파레토 전선을 성공적으로 도출하였다. 파레토 전선 상의 각 점은 특정 DOP 성능과 정밀 궤도 결정 성능을 달성하는 고유하고 효율적인 위성군 설계를 의미한다. 도출된 파레토 전선에서 곡률이 가장 큰 지점, 즉 가장 합리적인 절충안을 나타내는 무릎점을 식별하였다.
무릎점 근처에서 선택된 해는 최소한의 위성 수를 사용하면서도, 사용자의 DOP와 시스템의 정밀 궤도 결정 정밀도 (정밀 궤도 결정 공분산)를 모두 만족스럽게 개선할 수 있는 최선의 균형을 이루는 위성군 설계를 대표한다. 따라서 본 연구에서 제안한 위성군 설계는 KPS의 성능을 효과적으로 보강하기 위한, 구체적이고 정량적인 가이드라인을 제공한다. 향후 KPS의 고도화 및 저궤도 연계 발전 전략 수립에 중요한 기술적 기반이 될 것으로 기대된다. 향후 연구로는 시스템 구축 및 운영 비용을 추가적인 목적함수로 고려하거나, KPS 혹은 저궤도 위성 고장 시의 강인성 (resilience)과 같은 새로운 성능 지표, 그리고 KPS 위성 뿐만이 아니라 저궤도 위성까지도 포함한 정밀 궤도 결정 성능지표 등을 포함하여 최적화 문제를 확장하는 방안을 고려할 수 있다.
Conceptualization, G.-I. Jee, Y.J. Lee; methodology, G.-I. Jee; software, G.-I. Jee; validation, Y. J. Lee; formal analysis, G.-I. Jee; investigation, G.-I. Jee, Y.J. Lee; resources, G.-I. Jee; data curation, G.-I. Jee; writing, G.-I. Jee; review and editing, G.-I. Jee, Y.J. Lee, J. Jang, C. Lee, B. Jung; project administration, G.-I. Jee; funding acquisition, B. Jung
The authors declare no conflict of interest.
Akiyama, K., Kawano, I., & Inoue, K. 2023, Improving QZSS Precise Orbit Determination using Space-based and Ground-based Observations, Trans. Japan Soc. Aero. Space Sci., 66, 93-102. https://doi.org/10.2322/tjsass.66.93
Çelikbilek, K., Lohan, E. S., & Praks, J. 2025, Optimization of a LEO-PNT Constellation: Design Considerations and Open Challenges, International Journal of Satellite Communications and Networking, 43, 272-292. https://doi.org/10.1002/sat.1555
Çelikbilek, K., Saleem, Z., Ferre, R. M., Praks, J., & Lohan, E. S. 2022, Survey on Optimization Methods for LEO-Satellite-Based Networks with Applications in Future Autonomous Transportation, Sensors, 22, 1421. https://doi.org/10.3390/s22041421
Cuate, O. & Schutze, O. 2020, Pareto Explorer for Finding the Knee for Many Objective Optimization Problems, Mathematics, 8, 1651. https://doi.org/10.3390/math8101651
Dach, R., Lutz, S., Walser, P., & Fridez, P. 2015, Bernese GNSS Software Version 5.2, Astronomical Institute, University of Bern. http://www.bernese.unibe.ch
Deb, K., Pratap, A., Agarwal, S., & Meyarivan, T. 2002, A fast and elitist multiobjective genetic algorithm: NSGA-II, IEEE Trans. Evol. Comput., 6, 182-197. https://doi.org/10.1109/4235.996017
Deb, K. 2011, Multi-Objective Optimization Using Evolutionary Algorithms: An Introduction (London: Springer).
Eissfeller, B., Pany, T., Dötterböck, D., & Förstner, R. 2024, A Comparative Study of LEO-PNT Systems and Concepts, Proceedings of the ION 2024 Pacific PNT Meeting, pp.758-782. https://doi.org/10.33012/2024.19646
Ge, H., Li, B., Jia, S., Nie, L., Wu, T., et al. 2022, LEO Enhanced Global Navigation Satellite System (LeGNSS): progress, opportunities, and challenges, Geo-spatial Information Science, 25, 1-13. https://doi.org/10.1080/10095020.2021.1978277
Ge, H., Meng, G., & Li, B. 2024, LEO enhanced GNSS (LeGNSS) Precise point positioning with emphasis on model comparison, Advances in Space Research, 74, 2156-2168. https://doi.org/10.1016/j.asr.2024.06.006
Guan, M., Xu, T., Gao, F., Nie, W., & Yang, H. 2020, Optimal Walker Constellation Design of LEO-Based Global Navigation and Augmentation System, Remote Sens., 12, 1845. https://doi.org/10.3390/rs12111845
Kim, D. 2025, A satellite constellation design for enhanced navigation availability in the Korean region, GPS Solutions, 29, 129. https://doi.org/10.1007/s10291-025-01887-9
Li, M., Xu, T., Ge, H., Guan, M., Yang, H., et al. 2021, LEO-Constellation-Augmented BDS Precise Orbit Determination Considering Spaceborne Observational Errors, Remote Sensing, 13, 3189. https://doi.org/10.3390/rs13163189
Meng, Y., Bian, L., Han, L., Lei, W., Yan, T., et al. 2018, A Global Navigation Augmentation System Based on LEO Communication Constellation, 2018 European Navigation Conference (ENC), pp.65-71. https://doi.org/10.1109/EURONAV.2018.8433242
Reid, T. G. R., Neish, A. M., Walter, T., & Enge, P. K. 2018, Broadband LEO Constellations for Navigation, NAVIGATION: Journal of The Institute of Navigation, 65, 205-220. https://doi.org/10.1002/navi.234
Tapley, B. D., Schutz, B. E., & Born, G. H. 2004, Statistical Orbit Determination (Amsterdam: Elsevier Inc.).
Teng, Y., Jia, X., & Peng, G. 2023, LEO navigation augmentation constellation design and precise point positioning performance analysis based on BDS-3, Adv. Space Res., 72, 1944-1960. https://doi.org/10.1016/j.asr.2023.05.018
Won, D., Lee, E., & Choi, C. 2024, Study on Multi-layer PNT through LEO PNT for Enhancing Korean Satellite Navigation, JPNT, 13, 365-378. https://doi.org/10.11003/JPNT.2024.13.4.365
Xue, W., Hu, M., Ruan, Y., Wang, X., & Yu, M. 2024, Research on Design and Staged Deployment of LEO Navigation Constellation for MEO Navigation Satellite Failure, Remote Sens., 16, 3667. https://doi.org/10.3390/rs16193667