Taeho Kim1![]() , Jina Lee1
, Jina Lee1![]() , Jungyo Park1
, Jungyo Park1![]() , Woogeun Ahn2
, Woogeun Ahn2![]() , Suk Won Jang2
, Suk Won Jang2![]() , Byungwoon Park1†
, Byungwoon Park1†![]()
1Department of Aerospace Engineering and Department of Convergence Engineering for Intelligent Drone, Sejong University, Seoul 05006, Korea
2Agency for Defense Development, Daejeon 34060, Korea
†Corresponding Author: Byungwoon Park, E-mail: byungwoon@sejong.ac.kr
Citation: Kim, T., Lee, J., Park, J., Ahn, W., Jang, S. W., & Park, B. 2026, Performance Analysis of KASS Satellite Clock and Orbit Corrections, Journal of Positioning, Navigation, and Timing, 15, 101-110.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2026 March, Volume 15, Issue 1, pages 101-110. https://doi.org/10.11003/JPNT.2026.15.1.101
Received on Feb 11, 2026, Revised on Feb 25, 2026, Accepted on Feb 27, 2026, Published on Mar 15, 2026.
Copyright © The Institute of Positioning, Navigation, and Timing
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
The Satellite-Based Augmentation System (SBAS) is a system that provides real-time correction and integrity information for satellite clock, orbit, and ionospheric delay errors using geostationary satellites to enhance the accuracy, integrity, continuity, and availability of Global Navigation Satellite Systems (GNSS). Satellite navigation systems including the Wide Area Augmentation System (WAAS) in the United States, the European Geostationary Navigation Overlay Service (EGNOS) in Europe, and the MTSAT Satellite-Based Augmentation System (MSAS) in Japan are currently in operation. In Korea, the Korea Augmentation Satellite System (KASS) has been developed to provide correction services for Global Positioning System (GPS) satellites. To ensure the reliability of SBAS services, it is essential to quantitatively monitor and validate the correction performance of individual error components such as satellite clock and orbit errors. In this study, the satellite clock and orbit correction performance provided by KASS was quantitatively analyzed using the International GNSS Service (IGS) final precise ephemeris and clock products as reference values. The analysis results showed that the Root Mean Square (RMS) User Range Error (URE) decreased from 0.45 m for broadcast navigation messages to 0.32 m when KASS corrections were applied. MSAS corrections, analyzed for comparison, exhibited an RMS URE of 0.25 m. These results confirm that KASS correction information effectively improves satellite clock and orbit accuracy for GPS satellites.
SBAS, KASS, GPS, performance evaluation
위성기반 보강시스템(Satellite-Based Augmentation System, SBAS)은 기준국 네트워크를 통해 Global Navigation Satellite System (GNSS) 위성 신호를 지속적으로 감시하고, 중앙 처리국에서 산출한 위성 시계, 궤도 및 전리층 지연 오차에 대한 보정 정보와 무결성 정보를 정지궤도 위성을 통해 사용자에게 방송하는 시스템이다. SBAS는 항공 분야에서 요구되는 정확도, 무결성, 연속성 및 가용성 성능을 충족하기 위해 개발되었으며, 특히 항공기 정밀 접근과 같은 안전 필수 운용을 지원하는 것을 주요 목적으로 한다 (RTCA 2006, Lee et al. 2025a).
SBAS의 중요한 특징 중 하나는 오차를 하나의 거리 보정값으로 제공하는 방식과 달리, 위성 시계, 위성 궤도 및 전리층 지연과 같은 오차 구성 요소를 상태 공간(state-space) 형태로 분리하여 보정 정보를 제공한다는 점이다 (Lim & Park 2017). 또한 보정 이후에도 잔존할 수 있는 오차의 한계를 정량적으로 표현한 무결성 파라미터를 함께 제공함으로써, 사용자가 보호 수준(protection level)을 산출하고 항법 해의 신뢰성을 판단할 수 있도록 한다. 이러한 특성으로 인해 SBAS는 항공 분야뿐만 아니라 해양, 측지, 농업, 드론 항법 등 다양한 고신뢰 위치결정 응용 분야로 활용 영역이 확대되고 있다 (Seok & Park 2016, Seok et al. 2017, Yoon et al. 2020). 최근에는 다중위성군 시대가 도래함에 따라 단일주파수 다중위성군(Single-Frequency Multi-Constellation, SFMC) SBAS의 성능 향상을 위한 연구가 진행되었으며 (Lim et al. 2017b, 2023), 나아가 이중주파수 다중위성군(Dual-Frequency Multi-Constellation, DFMC) SBAS로의 전환을 위한 연구도 활발히 수행되고 있다 (Lee et al. 2025b).
국제민간항공기구(International Civil Aviation Organization, ICAO) 표준에 따라 미국의 Wide Area Augmentation System (WAAS), 유럽의 European Geostationary Navigation Overlay System (EGNOS), 일본의 MTSAT Satellite-Based Augmentation System (MSAS), 러시아의 System for Differential Corrections and Monitoring (SDCM) 등 여러 SBAS가 전 세계적으로 구축·운영되고 있다 (ICAO 2018). 대한민국에서도 한국형 위성기반 보강시스템(Korea Augmentation Satellite System, KASS)이 구축되어 L1 C/A 사용자에 대한 시계, 궤도 및 전리층 오차 보정 정보를 방송하고 있다 (ICAO 2024).
SBAS 서비스의 신뢰성 확보를 위해서는 보정 정보의 성능을 지속적으로 모니터링하고 정량적으로 평가하는 과정이 요구된다 (Lim et al. 2016a, 2016b). 실제로 미국의 WAAS와 유럽의 EGNOS는 위성 보정 및 무결성 성능에 대한 월별 또는 주기적인 성능평가 보고서를 제공하며, 이를 통해 SBAS 서비스의 안정성과 신뢰성을 검증하고 있다 (European Satellite Service Provider 2018, William J. Hughes Technical Center 2018). 이러한 운영 사례는 지속적인 성능 모니터링과 검증을 통해 관리되어야 함을 보여준다. 이와 같은 SBAS의 운용 특성을 고려할 때, 위성 시계 및 궤도, 전리층 지연 오차와 같은 개별 오차 구성 요소에 대한 보정 성능과 그 신뢰성을 정량적으로 검증하는 과정은 SBAS 서비스의 안전성과 신뢰성을 확보하기 위해 필수적이다 (Lim et al. 2016a, 2016b).
현재 KASS에 대한 성능 분석 연구는 주로 최종 위치 정확도를 기반으로 수행되었으며 (Park et al. 2023), 각 오차 요소별 분석 연구로는 한반도 지역을 대상으로 KASS의 전리층 지연 보정 성능을 평가하고 분석한 연구가 수행된 바 있으나 (Lee & Park 2025), 위성 시계 및 궤도 보정 성분에 대한 정량적 성능 분석 사례는 상대적으로 제한적이다.
이에 본 연구에서는 KASS가 제공하는 위성 시계 및 궤도 보정 정보를 대상으로 정량적 성능 분석을 수행한다. SBAS는 위성 시계 및 궤도 보정 정보를 상태 공간 형태로 분리하여 제공하지만, 기준국이 특정 지역에 집중되어 있어 위성 관측 기하학적 배치(Dilution of Precision, DOP)가 불량한 경우 시계 오차와 궤도 오차가 완전히 분리되지 않고 결합된(coupled) 형태로 추정될 수 있다 (Han et al. 2018). 따라서 위성 시계와 궤도 보정 성능을 정확히 평가하기 위해서는 개별 성분을 분리하여 분석하기보다 측정치 영역에서 통합적으로 분석하는 것이 타당하다 (Jeong & Kim 2009, Han et al. 2018). 본 연구에서는 국제 GNSS 서비스(International GNSS Service, IGS)에서 제공하는 정밀 궤도력을 기준값으로 활용하여 위성 시계 및 궤도 오차를 의사거리 측정치 영역에서 비교·분석함으로써, KASS 위성 시계 및 궤도 보정 성분의 오차 특성을 체계적으로 평가하고자 한다. 본 논문의 구성은 다음과 같다. 2장에서는 SBAS의 위성 시계 및 궤도 보정 원리와 KASS 시스템 구조를 설명하고, 3장에서는 성능 분석 방법론을 제시한다. 4장에서는 분석 결과를 제시하며, 5장에서 결론을 제시하였다.
SBAS는 정지궤도 위성을 통해 GPS 위성의 시계 및 궤도 오차에 대한 보정정보를 사용자에게 제공한다. SBAS 서비스는 RTCA DO-229 표준에 따라 총 64가지 메시지 타입으로 구성되어 있으며, 이 중 MT 2~5, MT 24, MT 25가 위성 시계 및 궤도 보정과 관련된 정보를 제공한다 (RTCA 2006). MT 9는 Geostationary Earth Orbit navigation message로서 SBAS 정지궤도 위성 자체의 시계 및 궤도 정보를 제공하며, MT 24와 MT 25는 각각 mixed fast/long-term satellite error corrections와 long-term satellite error corrections로서 GPS 위성에 대한 보정정보를 전송한다.
SBAS가 제공하는 위성 보정정보는 시간에 따른 변화 특성에 따라 fast correction과 long-term correction으로 구분된다. Fast correction은 빠르게 변화하는 위성 시계 오차를 주로 보정하며, long-term correction은 상대적으로 느리게 변화하는 위성 시계 오차 및 궤도 오차의 장기적인 변화를 보정한다. 사용자는 이 두 보정값을 결합하여 최종적으로 의사거리에 적용할 보정값을 Eq. (1)과 같이 산출한다 (RTCA 2006).
$$PRC_{Sat}^{j}=FC^{j}+LTC^{j}$$
여기서 $PRC_{Sat}^{j}$는 위성 $j$에 대한 최종 의사거리 보정값, $FC^j$는 fast correction, $LTC^j$는 long-term correction을 나타낸다.
Fast correction은 주로 위성 시계 오차의 빠른 변화를 보정하기 위해 설계되었으며, MT 2~5, MT 24 메시지를 통해 전송된다 (RTCA 2006). MT 2~5는 각각 13개 위성에 대한 fast correction을 포함하며, MT 24는 fast correction과 long-term correction을 혼합하여 제공한다. Fast correction의 최대 방송 주기(maximum update interval)는 MT 7에서 제공하는 성능 저하 계수(fast correction degradation factor indicator, ai) 값에 따라 6초에서 60초 사이로 결정되므로, 사용자는 보정 정보의 유효 시간이 만료되기 전에 최신 메시지를 지속적으로 수신해야 한다 (RTCA 2006). 특정 시각 $t$에서 위성 $j$에 대한 fast correction은 Eqs. (2, 3)과 같이 계산되며, 사용자는 이를 이용하여 수신 시각과 기준 시각 간의 차이를 보상할 수 있다.
$$FC^{j}(t)=PRC_{t_{o}}^{j}+RRC^{j}\cdot(t-t_{t_{o}})$$
$$RRC^{j}=\frac{PRC_{current}^{j}-PRC_{previous}^{j}}{\Delta t}$$
여기서 $PRC_{i_0}^j$는 fast correction 데이터 발행 번호(issue of data fast corrections) $i_0$에 해당하는 fast correction 기준값, $t_{i_0}$는 $PRC_{i_0}^j$의 적용 유효 시각(time of applicability)을 나타낸다. $RRC^j$는 range rate correction으로서 $PRC_{i_0}^j$의 시간에 따른 변화율을 나타내며, 사용자는 Eq. (3)과 같이 최근에 수신된 $PRC_{current}^j$값과 이전에 수신된 $PRC_{previous}^j$값의 차이를 시간 간격($\Delta t$)으로 나누어 계산한다. RRC는 Selective Availability (SA) 운용 당시 빠르게 변화하는 PRC의 시간 지연 오차를 보상하기 위해 도입되었으나, 2000년 SA 해제 이후 PRC의 시간적 변화가 대기 오차 수준으로 RRC가 감소함에 따라 RRC의 불필요성이 제기되었다 (Park et al. 2006). Radio technical commission for maritime services에서는 RRC를 0으로 설정하는 것이 권고사항으로 정해졌으며 (IALA 2008), SBAS 환경에서도 RRC 제거의 유효성이 기술적으로 검증된 바 있다 (Lim et al. 2017a). 다만 현재까지 항공 분야에서는 RTCA DO-229 표준에 따라 RRC가 유지되고 있다 (RTCA 2020, EUROCAE 2023).
Fast correction의 정확도는 User Differential Range Error (UDRE)로 표현되며, 이는 MT 2~5 메시지에 함께 User Differential Range Error Indicator (UDREI)가 전송되어 사용자가 해당 보정값의 신뢰도를 평가할 수 있도록 한다 (RTCA 2006). UDRE 값이 클수록 보정 오차의 불확실성이 크므로, 사용자는 이를 고려하여 위성 선택 및 가중치 조정에 활용할 수 있다.
Long-term correction은 위성 시계 및 궤도 오차의 장기적인 변화를 보정하기 위해 설계되었으며, MT 24, MT 25 메시지를 통해 전송된다 (RTCA 2006). MT 24는 6개 위성에 대한 혼합 보정을, MT 25는 long-term correction만을 제공한다. Long-term correction을 적용하기 위해서는 GPS 항법 메시지의 Issue of Data Ephemeris와 MT 25의 Issue of Data (IOD)가 일치하는지 확인해야 하며, 두 값이 일치할 경우에만 MT 25의 보정정보를 해당 GPS 항법 메시지로 계산한 위성 시계 및 궤도에 적용할 수 있다 (RTCA 2006).
Long-term correction은 일반적으로 수십 초에서 120초 간격으로 전송되며, 이는 fast correction의 6초 간격에 비해 훨씬 긴 주기로 궤도 오차의 상대적으로 느린 변화 특성을 반영한 것이다 (RTCA 2006). 위성 시계 및 궤도 오차는 시간에 따라 지속적으로 변화하므로, MT 25는 velocity code를 통해 보정정보의 시간 변화율을 선택적으로 제공한다. Velocity code가 0인 경우 한 메시지에 최대 4개 위성의 보정정보를 포함하지만 변화율은 제공되지 않아 메시지를 더 자주 전송해야 한다 (Lee et al. 2025a). Velocity code가 1인 경우 궤도 오차 변화율 ($\delta \dot{x}$, $\delta \dot{y}$, $\delta \dot{z}$)과 시계 오차 변화율을 함께 제공하여 메시지 수신 간격 동안 선형 보간이 가능하므로 전송 주기를 길게 설정할 수 있지만, 데이터 용량 증가로 인해 한 메시지에 최대 2개 위성 정보만 포함한다 (Lee et al. 2025a).
Long-term correction은 3차원 궤도 오차 벡터 ($\delta x$, $\delta y$, $\delta z$)와 시계 오차 $\delta t$로 구성되며, 이를 사용자 위치에서 의사거리 보정값으로 변환하기 위해서는 사용자-위성 간 시선 벡터를 이용한 투영이 필요하다. 특정 시각 $t$에서 위성 $j$에 대한 long-term correction은 Eq. (4)와 같이 계산된다.
$$LTC^{j}(t)=-(\delta x^{j}\cdot e_{x}+\delta y^{j}\cdot e_{y}+\delta z^{j}\cdot e_{z})-c\cdot\delta t^{j}+LTC_{v}^{j}\cdot(t-t_{LT})$$
여기서 $\delta x^{j}$, $\delta y^{j}$, $\delta z^{j}$는 Earth-Centered Earth-Fixed (ECEF) 좌표계에서 정의된 위성 $j$의 궤도 오차 성분, $e_x$, $e_y$, $e_z$는 사용자로부터 위성으로의 단위 시선 벡터 성분, $c$는 광속도, $\delta t^j$는 위성 시계 오차, $LTC_v^j$는 velocity code 유무에 따른 변화율 항, $t_{LT}$ 는 long-term correction의 기준 시각을 나타낸다. Velocity code가 0인 경우 $LTC_v^j$는 0으로 간주되며, Velocity Code가 1인 경우 궤도 오차 변화율과 시계 오차 변화율을 시선 방향으로 투영한 값이 사용된다.
Eq. (4)의 첫 번째 항은 궤도 오차를 시선 방향으로 투영한 값이며, 두 번째 항은 시계 오차를 거리 단위로 변환한 값이다. 세 번째 항은 기준 시각 이후의 시간 경과에 따른 보정값 변화를 반영한다. SBAS는 궤도 오차와 시계 오차를 결합된 형태로 제공하므로, 사용자는 별도의 궤도 계산 없이 Eq. (4)를 직접 적용하여 의사거리 보정을 수행할 수 있다.
Long-term correction의 정확도는 SBAS 기준국 네트워크의 배치와 위성 가시성에 따라 달라질 수 있으며, 일반적으로 서비스 영역 중심부에서 가장 높은 정확도를 나타낸다.
SBAS가 제공하는 위성 시계 및 궤도 보정 성능을 정량적으로 평가하기 위해서는 높은 정확도를 가진 기준값이 필요하다. 본 연구에서는 IGS 정밀 궤도력 및 시계 product를 기준으로 활용하였다. IGS는 전 세계에 분산된 네트워크로부터 수집된 관측 데이터를 처리하여 약 2.5 cm 수준의 궤도 정확도와 75 ps 수준의 시계 정확도를 제공한다 (Montenbruck et al. 2015).
2장에서 설명한 방법으로 산출한 SBAS 보정 적용 위성 시계 및 궤도와 IGS 정밀 product를 비교하기 위해서는 먼저 두 데이터 간 기준 좌표계 및 시각 기준의 차이를 보정해야 한다 (Han et al. 2018, Nie et al. 2019).
SBAS 메시지를 통해 보정된 위성 위치는 위성 안테나 위상 중심(Antenna Phase Center, APC)을 기준으로 정의되는 반면, IGS 정밀 궤도는 위성 질량 중심(Center of Mass, COM)을 기준으로 제공된다 (Han et al. 2018). 따라서 두 궤도를 직접 비교하기 위해서는 Fig. 1에서와 같이 IGS COM 기준 궤도를 APC 기준으로 변환해야 한다. 본 연구에서는 IGS에서 제공하는 Antenna Phase Center Offset (PCO) 정보를 활용하여 Eq. (5)와 같이 변환하였다 (Schmid et al. 2007).
$$R_{APC}^{j} = R_{COM}^{j} + T_{ECEF}^{body} \cdot \Delta R_{PCO}^{j}$$
여기서 $R_{APC}^j$는 위성 $j$의 APC 기준 ECEF 위치 벡터, $R_{COM}^j$는 COM 기준 ECEF 위치 벡터, $T_{ECEF}^{body}$ 는 위성 본체 좌표계에서 ECEF 좌표계로의 변환 행렬, $\Delta R_{PCO}^j$는 위성 본체 좌표계에서 정의된 PCO 벡터를 나타낸다.
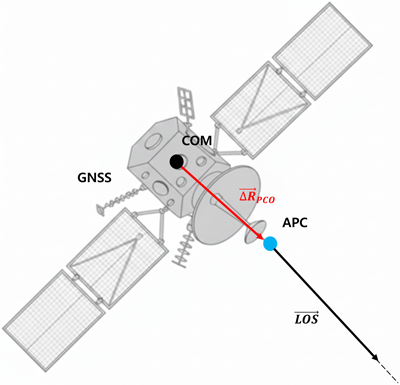
Fig. 1. Geometric relationship between the Center of Mass (COM) and Antenna Phase Center (APC) for a GNSS satellite.
좌표계 변환 후, 궤도 오차를 위성 궤도 분석에 적합한 radial, along-track, cross-track 방향 성분으로 분해하였다. IGS 정밀 궤도로부터 얻은 위성 위치 및 속도 벡터를 이용하여 Eq. (6)과 같이 변환하였다 (Montenbruck et al. 2015).
$$\begin{bmatrix} \Delta r_{A}^{j}(t) \\ \Delta r_{C}^{j}(t) \\ \Delta r_{R}^{j}(t) \end{bmatrix} = \begin{bmatrix} e_{A} \\ e_{C} \\ e_{R} \end{bmatrix} \cdot \Delta R^{j}(t)$$
여기서 $\Delta r_A^j (t)$, $\Delta r_C^j (t)$, $\Delta r_R^j (t)$는 각각 시각 $t$에서 위성 $j$의 along-track, cross-track, radial 방향 궤도 오차를 나타낸다. $e_A$ 는 위성 속도 방향의 단위 벡터, $e_R$ 는 지구 중심에서 위성을 향하는 방향의 단위 벡터, $e_C$ 는 이 두 방향에 수직인 단위 벡터이며, $\Delta R^j (t)$는 IGS 정밀 궤도와 SBAS 보정을 적용한 궤도 간 차이를 나타낸다.
SBAS는 L1 C/A 코드 측정치를 기준으로 시계 보정을 제공하지만, IGS 정밀 시계는 P1, P2 코드의 이중주파수 Ionosphere-Free (IF) 조합을 기준으로 산출된다 (Han et al. 2018). 이로 인한 하드웨어 지연 편차는 P1-C1 차분 코드 편차(Differential Code Bias, DCB)를 이용하여 보정하였다. L1 C/A 코드 기준 시계 오차 $\delta t_{C1}^j$와 P1/P2 IF 조합 기준 시계 오차 $\delta t_{P1/P2}^j$간의 관계는 Eq. (7)과 같다 (Rho & Langley 2007).
$$\delta t_{C1}^{j}=\delta t_{P1/P2}^{j}+DCB_{P1-C1}^{j}+\frac{f_{2}^{2}}{f_{1}^{2}-f_{2}^{2}}DCB_{P1-P2}^{j}$$
여기서 $DCB_{P1-C1}^j$는 P1 코드와 C1 코드 간 차분 편차, $DCB_{P1-P2}^j$는 P1 코드와 P2 코드 간 차분 편차, $f_1$과 $f_2$는 각각 L1과 L2 주파수를 나타낸다. 본 연구에서는 Center for Orbit Determination in Europe (CODE)에서 제공하는 DCB 값을 적용하였다.
위성 시계 및 궤도 오차가 실제 사용자의 측위 성능에 미치는 영향은 개별 성분의 크기만으로는 정확히 판단할 수 없다. 위성 시계 오차와 궤도 오차는 의사거리 측정치 내에서 결합된 형태로 나타나며, 특히 궤도 오차는 위성과 사용자 간의 기하학적 배치에 따라 시계 오차와 상호 보상되거나 증폭될 수 있다 (Jeong & Kim 2009, Han et al. 2018). 따라서 위성 시계 및 궤도 오차를 사용자 거리 영역(range domain)인 시선 방향(Line-of-Sight, LOS)으로 투영된 결합 오차, 즉 User Range Error (URE)를 분석하는 것이 타당하다.
한편, KASS를 포함한 SBAS는 자체 시각 기준인 SBAS Network Time (SNT)를 사용하는 반면, 기준값인 IGS 정밀 product는 GPS Time (GPST)를 따른다. 따라서 시스템간 시각 오프셋은 특정 시점(epoch)에서 모든 위성에 동일하게 더해지는 공통 바이어스(common bias)로 나타난다 (Han et al. 2018). 이 공통 바이어스는 실제 사용자의 항법 해 계산 과정에서 수신기 시계 오차 추정값에 흡수되므로 측위 정확도에는 영향을 미치지 않는다. 따라서 거리영역에서의 순수한 SBAS 위성 보정 성능만을 평가하기 위해서는 이 공통 바이어스를 제거한 URE를 산출해야 한다.
본 연구에서는 3.1절에서 산출한 SBAS 보정 후 잔여 오차와 궤도 오차 성분을 이용하여, 먼저 시선 방향으로 투영된 순간 URE를 산출하고, 여기서 공통 바이어스를 제거하여 최종 성능을 평가하였다. 구체적인 계산 절차는 다음과 같다.
각 위성 $j$에 대해 시각 $t$에서의 시선 방향 URE, $\Delta\rho^{j}(t)$는 위성 궤도 오차 벡터를 사용자의 시선 벡터 방향으로 투영한 값과 시계 오차의 차이로 Eq. (8)과 같이 정의된다.
$$\Delta\rho^{j}(t)=e^{j}(t)\cdot\Delta r^{j}(t)-\Delta\tilde{t}^{j}(t)$$
여기서 $e^j (t)$는 사용자(또는 지구 중심)에서 위성 $j$를 향하는 단위 시선 벡터(Unit LOS Vector), $\Delta r^j (t)$는 위성의 3차원 위치 오차 벡터, $\Delta\tilde{t}^{j} (t)$는 시계 오차 및 잔여 보정 오차를 거리 단위로 환산한 값이다. 위성 궤도 오차 중 radial 성분은 시선 벡터와 거의 일치하므로 투영 비율이 크며, along-track 및 cross-track 성분은 시선 벡터와의 각도가 크기 때문에 투영 비율이 상대적으로 작게 나타난다.
이때 SNT와 GPST 간 시각 오프셋에 의한 공통 바이어스 B(t)를 Eq. (9)와 같이 추정하고, 최종적으로 공통 바이어스가 제거된 각 위성의 시선 방향 URE는 Eq. (10)과 같이 산출된다.
$$B(t)=\frac{1}{N(t)}\sum_{i=1}^{N(t)}\Delta\rho^{i}(t)$$
$$URE^{j}(t)=\Delta\rho^{j}(t)-B(t)$$
2024년 1월부터 12월까지 매월 1일부터 5일까지 총 60일간의 데이터를 분석하였다. KASS 보정정보는 Centre National d’Etudes Spatiales (CNES) FTP 서버로부터 취득한 KASS 정지궤도 위성(PRN 134)의 SBAS 메시지(MT 2~5, MT 24, MT 25)를 이용하여 산출하였으며, 비교를 위해 MSAS 정지궤도 위성(PRN 137)의 보정정보 역시 CNES FTP 서버로부터 동일한 기간에 대해 수집하였다.
보정정보 성능 분석을 위한 GNSS 관측 데이터는 Crustal Dynamics Data Information System (CDDIS)를 통해 IGS 기준국 관측 데이터를 취득하였다. KASS 보정정보 분석을 위해 한국 대전에 위치한 IGS 기준국 DAEJ의 관측 데이터를 사용하였으며, MSAS 보정정보 분석을 위해서는 일본 도쿄에 위치한 IGS 기준국 CHOF의 관측 데이터를 사용하였다. 두 기준국의 배치는 Fig. 2에 나타내었다.
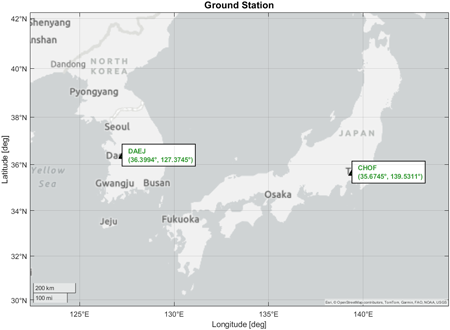
Fig. 2. IGS reference stations (DAEJ and CHOF).
위성 시계 및 궤도 기준값 산출에 사용한 데이터 소스는 Table 1에 정리하였다. 기준 시계 및 궤도로는 IGS에서 제공하는 정밀 궤도력(SP3 final, CLK final)을 사용하였으며, DCB 보정은 CODE에서 제공하는 product를, PCO는 IGS에서 제공하는 IGS Antenna Exchange Format (ANTEX) 파일을 사용하였다.
Table 1. Reference data sources.
| Data type | Source | Accuracy | Interval |
|---|---|---|---|
| IGS final product (SP3) | IGS | ~2.5 cm | 15 min |
| IGS final product (CLK) | IGS | ~75 ps | 30 sec |
| DCB product | CODE | 0.3 ns | 1 day |
| ANTEX | IGS | – | – |
전체 데이터셋 중 대표날 (2024년 4월 1일)을 선택하여 일일 URE 변화 추이를 분석하였다. Figs. 3-5는 GPS 위성군에 대한 radial 궤도 오차, 시계 오차, URE의 시계열을 각각 나타낸다.
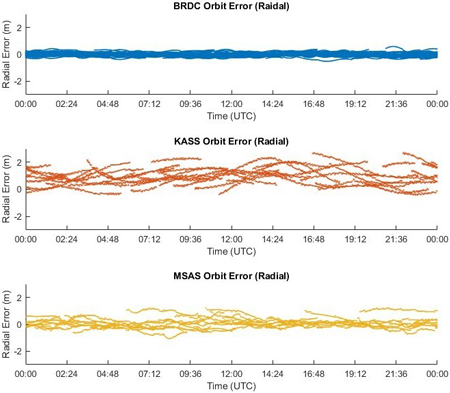
Fig. 3. Comparison of radial orbit error for BRDC, KASS, and MSAS (April 1, 2024).
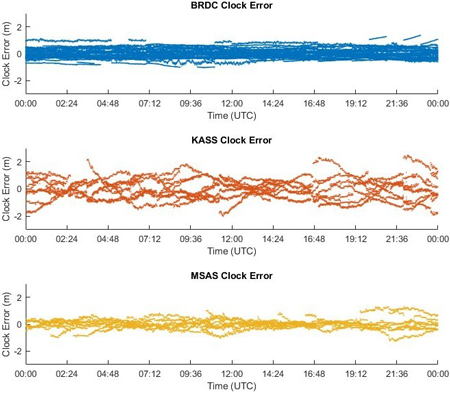
Fig. 4. Comparison of Clock Error for BRDC, KASS, and MSAS (April 1, 2024).
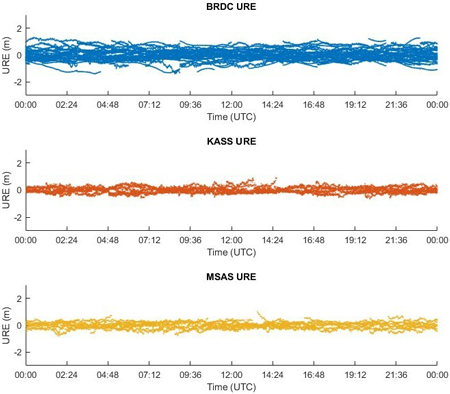
Fig. 5. Comparison of URE for BRDC, KASS, and MSAS (April 1, 2024).
Fig. 3은 KASS 및 MSAS 보정 적용 시 radial 궤도 오차를 나타낸 것으로, Broadcast ephemeris (BRDC) 대비 큰 크기의 오차를 확인할 수 있다. Fig. 4의 시계 오차 역시 KASS 및 MSAS 보정이 BRDC보다 큰 값을 보이는 구간이 존재하였다. 반면 Fig. 5의 URE는 궤도 오차와 시계 오차를 사용자 가시선 방향으로 투영한 값으로, SBAS 보정 적용 시 BRDC 대비 감소하는 것을 확인하였다.
Table 2는 2024년 4월 1일에 대한 radial 궤도 오차, 시계 오차, URE의 Root Mean Square (RMS) 통계를 제시한 것이다. radial 궤도 오차 RMS는 BRDC 0.1 m 대비 KASS 1.1 m, MSAS 0.4 m로 증가하였으며, 시계 오차 RMS는 BRDC 0.34 m 대비 KASS 0.72 m, MSAS 0.33 m 수준으로 나타났다. 반면 URE RMS는 BRDC 0.39 m에서 KASS 0.20 m, MSAS 0.22 m로 각각 48.7%, 43.6% 감소하여 보정 효과를 확인하였다.
개별 오차 성분에서 KASS가 MSAS 대비 큰 값을 나타낸 것은 기준국 네트워크 분포의 차이로 분석된다. KASS는 MSAS 대비 제한적인 기준국 네트워크 분포를 가지고 있다. 위성에서 바라본 기준국의 기하학적 배치가 제한적일 경우 높은 DOP 값을 가지며, 궤도 오차와 시계 오차를 개별적으로 분리하여 추정하기 어렵다. 이로 인해 궤도 오차와 시계 오차는 역상관관계를 가지며 서로 결합된 형태로 나타나는 특성이 있다 (Jeong & Kim 2009). Table 2에서 KASS의 radial 궤도 오차 RMS가 1.1 m로 MSAS 0.4 m 대비 약 2.8배 큰 값을 갖는 것은 이러한 기준국 네트워크 분포 특성에 기인한 것으로 판단된다.
Table 2. RMS statistics of orbit radial error, clock error, and URE (April 1, 2024).
| Method | Radial orbit error (m) | Clock error (m) | URE (m) |
|---|---|---|---|
| BRDC | 0.1 | 0.34 | 0.39 |
| KASS | 1.1 | 0.72 | 0.20 |
| MSAS | 0.4 | 0.33 | 0.22 |
위성별 URE 성능 분석을 위해 Fig. 6에 2024년 4월 1일 전체 GPS PRN에 대한 URE RMS를 도시하였다. 대부분의 위성에서 SBAS 보정 적용 시 URE가 감소하였으나, 일부 위성에서는 SBAS 보정이 BRDC보다 큰 URE를 나타냈다. KASS의 경우 위성 G07, MSAS의 경우 위성 G27, G29에서 보정 적용 시 URE가 증가하는 것을 확인할 수 있다.
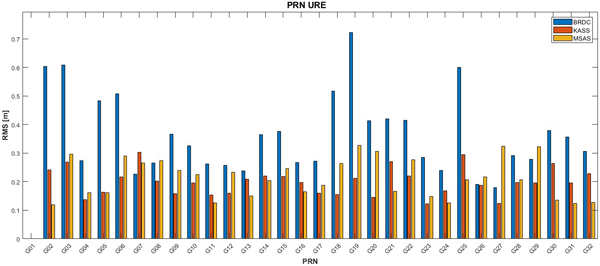
Fig. 6. Comparison of URE RMS for PRNs (April 1, 2024).
Table 3은 URE가 증가한 위성들의 통계를 정리한 것이다. 위성 G07의 경우 BRDC URE RMS 0.22 m 대비 KASS 0.30 m로 36.4% 증가하였다. 위성 G27은 BRDC 0.18 m 대비 MSAS 0.32 m로 77.8% 증가하였으며, 위성 G29는 BRDC 0.28 m 대비 MSAS 0.32 m로 14.3% 증가하였다.
Table 3. RMS comparison for specific PRNs (G07, G27, G29).
| PRN | BRDC | KASS | MSAS | ||||||
|---|---|---|---|---|---|---|---|---|---|
| RMS (m) | 50% (m) | 95% (m) | RMS (m) | 50% (m) | 95% (m) | RMS (m) | 50% (m) | 95% (m) | |
| G07 | 0.22 | 0.22 | 0.41 | 0.30 | 0.14 | 0.69 | 0.26 | 0.14 | 0.63 |
| G27 | 0.18 | 0.18 | 0.39 | 0.12 | 0.09 | 0.21 | 0.32 | 0.30 | 0.57 |
| G29 | 0.28 | 0.28 | 0.53 | 0.19 | 0.14 | 0.40 | 0.32 | 0.27 | 0.56 |
이러한 특정 위성의 URE 증가 원인을 파악하기 위해 Fig. 7에 해당 위성들의 지상궤적을 KASS 기준국(DAEJ) 및 MSAS 기준국(CHOF)과 함께 도시하고, 해당 시각의 UDREI 값을 나타내었다. 분석 결과, URE가 증가한 위성들은 각 SBAS 서비스 영역 통과 시 일부 구간만 관측되거나 지상궤적이 기준국 네트워크 바깥쪽을 지나 관측 기하학적 배치가 불량하였으며, 이러한 구간에서 UDREI가 9 이상의 높은 값을 나타내거나 미사용(unused)으로 처리된 것을 확인할 수 있다. 이는 관측 기하학적 배치가 불량하거나 관측 시간이 제한적인 경우 SBAS 시스템이 해당 위성에 높은 불확실성을 부여함을 의미하며, 이러한 경우 보정정보의 정확도가 저하되는 것으로 알려져 있다 (Jeong & Kim 2009). 높은 UDREI 값이 부여된 위성은 사용자 항법 해 계산 과정에서 낮은 가중치가 적용되므로, 이들 위성의 URE 증가가 실제 측위 정확도에 미치는 영향은 제한적일 것으로 판단된다.
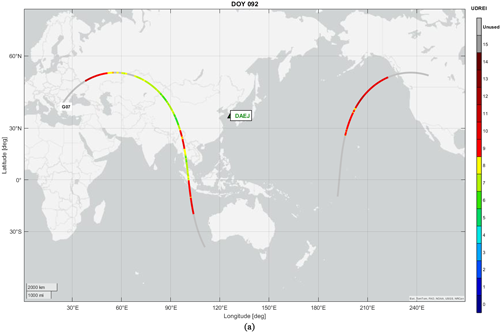
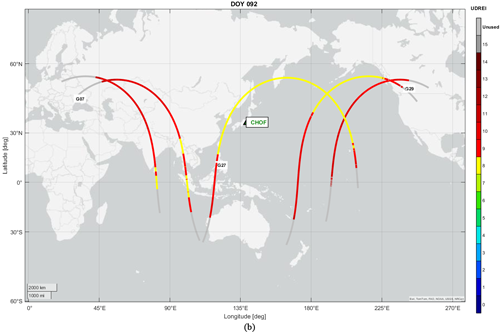
Fig. 7. Ground tracks of GPS satellites with elevated URE with UDREI on DOY 092: (a) as observed at DAEJ using KASS, and (b) as observed at CHOF using MSAS.
일일 분석 결과의 일반화 가능성을 검증하기 위해 전체 60일간의 URE 통계를 분석하였다. Table 4는 2024년 1월부터 12월까지 매월 1일부터 5일까지 총 60일간의 URE RMS, 50%, 95% 통계를 나타낸 것이다.
Table 4. URE statistics for the entire dataset.
| Method | URE | ||
|---|---|---|---|
| RMS (m) | 50% (m) | 95% (m) | |
| BRDC | 0.45 | 0.30 | 0.86 |
| KASS | 0.32 | 0.19 | 0.56 |
| MSAS | 0.25 | 0.16 | 0.48 |
전체 기간에 대한 URE RMS는 BRDC 0.45 m 대비 KASS 0.32 m, MSAS 0.25 m로 각각 28.9%, 44.4% 감소하였다. 50% 백분위수는 BRDC 0.30 m 대비 KASS 0.19 m, MSAS 0.16 m로 나타났으며, 95% 백분위수는 BRDC 0.86 m 대비 KASS 0.56 m, MSAS 0.48 m 수준으로 확인되었다. MSAS가 KASS 대비 우수한 URE 성능을 나타낸 것은 앞서 분석한 기준국 네트워크 분포의 차이에 기인한 것으로 판단된다.
Fig. 8은 BRDC, KASS, MSAS의 URE 확률밀도함수(probability density function)를 도시한 것이다. BRDC의 경우 0.3 m 부근에 분포의 중심이 위치하며 비교적 넓은 분산을 보였다. KASS와 MSAS는 BRDC 대비 분포의 중심이 각각 0.2 m, 0.15 m 수준으로 좌측으로 이동하였으며, 분산이 감소하여 보다 집중된 분포 형태를 나타냈다. 특히 MSAS의 경우 가장 좁은 분산과 낮은 중심값을 보여 안정적인 보정 성능을 확인하였다.
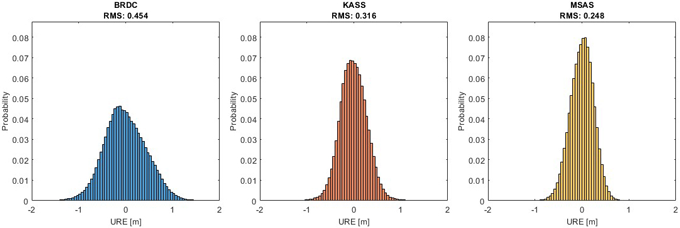
Fig. 8. Probability density functions of URE for BRDC, KASS, and MSAS.
본 연구에서는 한국형 위성항법보강시스템 KASS가 제공하는 GPS 위성 시계 및 궤도 보정정보의 성능을 IGS 정밀 궤도력을 기준으로 정량적으로 분석하였다. 2024년 1월부터 12월까지 매월 1~5일 총 60일간의 데이터를 분석하였으며, IGS 기준국 DAEJ와 CHOF에서 수신한 KASS 및 MSAS 보정정보를 GPS 방송 궤도력과 비교하였다.
평가 방법론으로는 IGS 정밀 product (SP3, CLK)을 기준값으로 활용하였으며, APC/COM 좌표 변환 및 DCB 보정을 수행한 후 URE를 산출하였다. 위성 궤도 오차와 시계 오차는 의사거리 측정치에서 결합된 형태로 나타나므로, URE를 통해 사용자 관점의 보정 성능을 평가하였다. SBAS network time과 GPS time 간 시각 오프셋에 의한 공통 바이어스를 제거하여 보정 성능을 분석하였다.
분석 결과, KASS는 전체 60일 기간에 대해 RMS URE 0.32 m를 나타냈으며 GPS 방송 궤도력(0.45 m) 대비 약 28.9% 감소하였다. 중앙값은 0.19 m로 36.7%, 95% 백분위수는 0.56 m로 34.9% 감소하였다.
MSAS와의 비교에서는 MSAS가 RMS URE 0.25 m로 KASS (0.32 m) 대비 약 21.9% 낮은 값을 나타냈다. 이는 MSAS가 일본 열도 전역에 분산된 광역 기준국 네트워크를 보유하고 있어 위성 가시성 및 기하학적 배치가 우수한 반면, KASS는 상대적으로 제한된 지역에 기준국이 배치되어 있기 때문으로 분석된다. KASS의 성능은 항공 항법을 위한 SBAS 요구사항을 충족하는 수준이며, 본 연구를 통해 KASS의 보정 성능을 확인하였다.
KASS는 한국 및 아시아-태평양 지역의 항공 안전 및 정밀 항법 서비스 제공을 목표로 서비스되고 있으며, 본 연구 결과는 향후 KASS 기준국 네트워크 확장 및 보정 알고리즘 최적화를 위한 기초 자료로 활용될 수 있을 것으로 기대된다.
이 논문은 정부(방위사업청)의 재원으로 국방과학연구소의 지원을 받아 수행된 연구임.
Conceptualization, B.P.; methodology, T.K. and B.P.; software, T.K.; validation, T.K., J.L., and J.P.; formal analysis, T.K., J.L., and J.P.; investigation (data collection), T.K., J.L., and J.P.; resources, W.A. and S.J.; data curation, T.K., J.L., and J.P.; writing—original draft preparation, T.K.; writing—review and editing, B.P., W.A., and S.J.; visualization, T.K. and J.L.; supervision, B.P., W.A., and S.J.; project administration, B.P., W.A., and S.J.; funding acquisition, B.P., W.A., and S.J. All authors have read and agreed to the published version of the manuscript.
The authors declare no conflict of interest.
EUROCAE 2023, ED-259A Minimum Operational Performance Standard for Dual-Frequency Multi-Constellation Satellite-Based Augmentation System Airborne Equipment, September 2023. https://www.eurocae.net/shop/standards/ed-259a/
European Satellite Service Provider 2018, EGNOS monthly performance report April 2018, ESSP-DRD-21929 https://egnos-user-support.essp-sas.eu/new_egnos_ops/resources-tools/performance-reports
Han, D.-H., Kim, D.-U., Kim, J.-B., Kee, C.-D., Choi, K.-S., et al. 2018, Methodology for Evaluating SBAS Satellite Correction, JPNT, 7, 277-284. https://doi.org/10.11003/JPNT.2018.7.4.277
IALA 2008, Recommendation R-135: On the Future of DGNSS, International Association of Marine Aids to Navigation and Lighthouse Authorities (IALA), Paris, France https://www.iala-aism.org/product/future-of-dgnss-r0135/
ICAO 2018, Concept of operations (CONOPS) for dual-frequency multi-constellation (DFMC) global navigation satellite system (GNSS), the ICAO Navigation Systems Panel, CONOPS V6.4, 27 April 2018
ICAO 2024, Final Report of the Sixth Meeting of the ICAO Asia/Pacific GBAS/SBAS Implementation Task Force (GBAS/SBAS ITF/6), ICAO RO Bangkok, 7-9 May 2024 https://www.icao.int/APAC/Meetings/Pages/2024-GBAS-SBAS-ITF6.aspx
Jeong, M.-S. & Kim, J.-R. 2009, Accuracy Analysis of SBAS Satellite Orbit and Clock Corrections using IGS Precise Ephemeris, Journal of Advanced Navigation Technology, 13, 178-186. https://koreascience.or.kr/article/JAKO200919663061092.page
Lee, H.-S. & Park, K.-D. 2025, Performance Analysis of GIM and SBAS Ionosphere Modeling for GPS Positioning in the Korean Peninsula, JPNT, 14, 91-99. https://doi.org/10.11003/JPNT.2025.14.1.91
Lee, J., Jo, Y., Kim, D., & Park, B. 2025a, Technical Analysis of DFMC SBAS Message Structure Compared to L1 Legacy SBAS, JPNT, 14, 119-129. https://doi.org/10.11003/JPNT.2025.14.2.119
Lee, J., Jo, Y., Park, B., Kim, D., & Lim, C. 2025b, Improving DFMC SBAS Performance by Integrating L1 SBAS Ionospheric Corrections with an Ionosphere-Weighted Model, in Proceedings of the 38th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2025), Sep 8-12, 2025, Baltimore, MD, pp.122-131. https://doi.org/10.33012/2025.20263
Lim, C.-S. & Park, B.-W. 2017, Comparative Analysis of Performance for DGPS and SBAS in Korea Region, J. Adv. Navig. Technol., 21, 279-286. https://doi.org/10.12673/jant.2017.21.3.279
Lim, C., Park, B., & Kee, C. 2017a, Efficiency Improvement of the Current SBAS System by Removal of RRC and Fast Correction, in Proceedings of the 2017 International Technical Meeting of The Institute of Navigation, Jan 30-Feb 2, 2017, Monterey, CA, pp.619-626. https://doi.org/10.33012/2017.14879
Lim, C.-S., Park, B., So, H., Jang, J., Seo, S., et al. 2016a, Analysis on the Multi-Constellation SBAS Performance of SDCM in Korea, JPNT, 5, 181-191. https://doi.org/10.11003/JPNT.2016.5.4.181
Lim, C., Park, B., & Yun, Y. 2023, L1 SFMC SBAS Message for Service Expansion of Multi-Constellation GNSS Support, IEEE Access, 11, 81690-81710. https://doi.org/10.1109/ACCESS.2023.3300580
Lim, C.-S., Seok, H.-J., Hwang, H.-Y., & Park, B. 2016b, Prediction on the Effect of Multi-Constellation SBAS by the Application of SDCM in Korea and Its Performance Evaluation, J. Adv. Navig. Technol., 20, 417-424. https://doi.org/10.12673/jant.2016.20.5.417
Lim, C., Shin, D., Hwang, H.-Y, Park, B., Kim, E., et al. 2017b, Performance Analysis on Multi-Constellation SBAS of the Modified L1-only SBAS Message, in Proceedings of the 30th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2017), Sep 25-29, 2017, Portland, OR, pp.1089-1094. https://doi.org/10.33012/2017.15139
Montenbruck, O., Steigenberger, P., & Hauschild, A. 2015, Broadcast versus precise ephemerides: a multi-GNSS perspective, GPS Solut., 19, 321-333. https://doi.org/10.1007/s10291-014-0390-8
Nie, Z., Zhou, P., Liu, F., Wang, Z., & Gao, Y. 2019, Evaluation of Orbit, Clock and Ionospheric Corrections from Five Currently Available SBAS L1 Services: Methodology and Analysis, Remote Sens., 11, 411. https://doi.org/10.3390/rs11040411
Park, B. W., Kim, J. H., Kee, C. D., Cleveland, A., Parsons, M., et al. 2006, RRC unnecessary for DGPS messages, IEEE Transactions on Aerospace and Electronic Systems, 42, 1149-1160. https://doi.org/10.1109/TAES.2006.248220
Park, S.-H., Park, Y.-H., Jeong, J.-H., & Park, J.-M. 2023, Accuracy Evaluation of KASS Augmented Navigation by Utilizing Commercial Receivers, JPNT, 12, 349-358. https://doi.org/10.11003/JPNT.2023.12.4.349
Rho, H. & Langley, R. B. 2007, The usefulness of WADGPS satellite orbit and clock corrections for dual-frequency precise point positioning, in Proceedings of ION GNSS 2007, Sep 25-28, 2007, Fort Worth, TX, pp.939-949 https://www.ion.org/publications/abstract.cfm?articleID=7594
RTCA 2006, DO-229D Minimum Operational Performance Standards for Global Positioning System / Wide Area Augmentation System Airborne Equipment, December 2006 https://www.rtca.org/product/do-229d/
RTCA 2020, Minimum Operational Performance Standards (MOPS) for Global Positioning System/Satellite-Based Augmentation System Airborne Equipment (RTCA DO229F), 2020 June, available from: http://www.rtca.org/product
Schmid, R., Steigenberger, P., Gendt, G., Ge, M., & Rothacher, M. 2007, Generation of a consistent absolute phase-center correction model for GPS receiver and satellite antennas, J. Geod., 81, 781-798. https://doi.org/10.1007/s00190-007-0148-y
Seok, H.-J. & Park, B.-W. 2016, Prediction of the Available Time for the SBAS Navigation of a Drone in Urban Canyon with Various Flight Heights, Journal of Cadastre & Land Information, 46, 133-148. https://doi.org/10.22640/LXSIRI.2016.46.1.133
Seok, H., Yoon, D., Lim, C., & Park, B. 2017, Suggestion on the SBAS Augmentation Message Providing System for the Low-cost GPS Receiver of Drone Operation, J. Adv. Navig. Technol., 21, 272-278. https://doi.org/10.12673/jant.2017.21.3.272
William J. Hughes Technical Center 2018, Wide area augmentation system performance analysis report, Report #64
Yoon, H., Seok, H., Lim, C., & Park, B. 2020, An Online SBAS Service to Improve Drone Navigation Performance in High-Elevation Masked Areas, Sensors, 20, 3047. https://doi.org/10.3390/s20113047