Jaewi Kim![]() , Boseong Kim
, Boseong Kim![]() , Beomju Shin†
, Beomju Shin†![]()
Division of Software, Hallym University, Chuncheon, Gangwon-do 24252, Republic of Korea
†Corresponding Author: Beomju Shin, E-mail: E-mail: bjshin@hallym.ac.kr
Citation: Kim, J., Kim, B., & Shin, B. 2025, Performance Analysis and Compensation Methods According to PDR Drift and Radio Map Resolution, Journal of Positioning, Navigation, and Timing, 14, 195-202.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2025 September, Volume 14, Issue 3, pages 195-202. https://doi.org/10.11003/JPNT.2025.14.3.195
Received on May 24, 2025, Revised on Jun 16, 2025, Accepted on Jul 12, 2025, Published on Sep 15, 2025.
Copyright © The Institute of Positioning, Navigation, and Timing
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
This study investigates the effect of Pedestrian Dead Reckoning (PDR) drift and radio map resolution on the performance of Surface Correlation (SC)-based indoor positioning. SC utilizes spatially accumulated Received Signal Strength Indicator (RSSI) sequences to improve localization accuracy, but its performance is sensitive to PDR errors and radio map granularity. To mitigate the impact of drift-induced misalignment, a ±10° rotation-based correction method is proposed. Simulations are conducted under varying resolutions (1 m, 2 m, 3 m) and drift levels (0.1°, 0.3°, 0.5°) to evaluate positioning accuracy and computational efficiency. The proposed method demonstrates consistent performance improvement under all drift conditions and is especially effective with high-resolution radio maps. The findings provide practical guidance for designing SC-based positioning systems with optimized trade-offs between accuracy and efficiency.
indoor localization, PDR, drift, RSSI, surface correlation
최근 스마트폰의 보급 확대와 함께 위치 기반 서비스에 대한 수요가 급격히 증가하고 있으며, 이에 따라 실내 환경에서도 높은 정확도의 위치 정보를 제공할 수 있는 기술에 대한 관심이 커지고 있다. 실외에서는 Global Navigation Satellite System를 통해 정밀한 위치 파악이 가능하지만, 실내나 도심 환경에서는 신호 차단 및 multipath 등의 문제로 정확도가 크게 저하된다. 이러한 문제를 해결하기 위해 다양한 실내 위치 추정 기술이 제안되어 왔으며, 그 중에서도 fingerprinting 기법은 널리 사용되는 대표적인 방식이다. 이 기법은 사용자가 특정 위치에서 측정한 Received Signal Strength Indicator (RSSI) 벡터를 사전에 구축된 radio map과 비교하여 사용자의 위치를 추정한다 (Bahl & Padmanabhan 2000).
Fingerprinting 기법은 구현이 비교적 간단하고, Wi-Fi와 같은 기존 무선 인프라를 활용할 수 있다는 장점으로 인해 다양한 연구가 진행되어 왔다 (Noh et al. 2021). 그러나 RSSI 기반 방식은 실내 환경 변화나 장애물로 인해 측정값이 불안정해지고, 단일 시점의 RSSI 벡터에만 의존하기 때문에 정확도 측면에서 한계가 존재한다 (Shin & Lee 2024). 또한 fingerprinting 방식은 대규모 환경에서는 계산량이 증가하여 실시간 위치 추정에 어려움을 겪는다는 점도 지적되고 있다 (Tran & Zhang 2012). 이러한 문제점을 보완하기 위한 대안으로는 Pedestrian Dead Reckoning (PDR) 기반 경로 정보와 누적 RSSI 패턴을 활용하는 Surface Correlation (SC) 기법이 제안되었다. SC는사용자가 이동 중 수신한 RSSI를 누적하여 User RSSI Surface (URS)를 생성하고, 이를 사전에 구축된 radio map 전체와 비교하여 가장 유사한 위치를 추정한다 (Shin & Lee 2024). 이 방식은 단일 RSSI 벡터보다 공간적 RSSI 패턴을 정보를 반영할 수 있어 더욱 정밀한 위치 추정이 가능하다. 그러나 SC 기법은 URS가 PDR 경로에 기반하기 때문에, 보행자의 PDR 누적 오차가 증가할 경우 URS가 공간적으로 왜곡되고, 이로 인해 위치 정합 정확도가 저하될 수 있다 (Shin & Lee 2024). 또한 radio map의 해상도에 따라 위치 표현의 정밀도와 계산 효율성 간 trade-off 문제가 발생하는데, 고해상도는 정밀한 위치 표현이 가능하지만 계산량이 증가하며, 저해상도는 계산 효율성이 향상되나 정확도가 저하되는 경향이 있다. 기존 연구들은 SC 기법의 정확도나 경로 정합 성능을 개별적으로 분석하거나, PDR 누적 오차 또는 radio map 해상도 변화 중 하나의 요소에 국한된 영향을 평가하는 데 그친 경우가 많다 (Shin & Lee 2024). 그러나 두 요소가 결합될 때 발생하는 상호작용 효과, 즉 PDR 오차와 해상도 변화가 함께 위치 추정 성능에 어떤 복합적인 영향을 미치는지에 대한 분석은 부족한 실정이다.
본 논문에서는 SC 기반 실내 위치 추정에서 발생하는 PDR 경로의 누적 오차와 radio map 해상도 변화가 위치 추정 성능에 미치는 영향을 분석하고, 이로 인한 성능 저하를 보완하기 위한 ± 10° 회전 탐색 기반의 누적 오차 보정 기법을 제안한다. 기존 SC 방식은 PDR 경로에 기반한 URS를 radio map과 비교하여 위치를 추정하지만, PDR 경로에 오차가 누적되면서 URS가 왜곡되어 정합성이 저하된다. 이를 해결하기 위해, 최근 PDR 경로의 일정 구간에 대해 총 3개의 후보 경로(+10°, 0°, -10°)를 생성하고, 각각 URS를 구성하여 radio map과의 상관도를 계산한 뒤, 가장 높은 상관도를 보이는 URS를 선택하여 해당 회전 각도를 누적 보정 각도로 반영하는 방법을 제안한다 (Shin et al. 2024). 이와 함께, SC 기법의 성능에 영향을 미치는 두 가지 핵심 요소인 PDR 누적 오차(0.1, 0.3, 0.5) 및 radio map 해상도(1 m, 2 m, 3 m)의 변화에 따른 위치 추정 정확도를 시뮬레이션을 통해 분석하였다. 성능 평가는 평균 위치 오차, RMSE, 최대 오차, 그리고 CDF 기반의 오차 분포를 통해 수행하였으며, 정확도와 계산 효율성 간의 tradeoff 관계를 고찰하였다.
논문의 구성은 다음과 같다. 2장에서는 fingerprinting, PDR, SC 등 주요 실내 위치 추정 기법의 이론적 배경과 기존 방식의 한계를 다룬다. 3장에서는 제안된 보정 기법의 알고리즘 구조와 실험 환경, 시뮬레이션 결과를 설명하며, 마지막 4장에서는 연구 결과를 요약하고 향후 연구 방향을 제시한다.
Fingerprinting은 실내 위치 추정을 위해 널리 활용되는 대표적인 기법으로, 사용자가 특정 지점에서 측정한 RSSI 벡터를 사전에 구축된 radio map과 비교하여 가장 유사한 위치를 추정하는 방식이다 (Bahl & Padmanabhan 2000). Fig. 1은 이러한 fingerprinting 방식의 기본 절차를 시각적으로 나타낸다.

Fig. 1. Overview of the fingerprinting localization process.
일반적으로 radio map은 실내 공간을 일정 간격의 Reference Point (RP)로 나누고, 각 RP에서의 RSSI 값을 수집하여 구축된다. 이 방식은 Wi-Fi AP, BLE beacon 등 기존 무선 인프라를 활용할 수 있어, 별도의 추가 하드웨어 없이 구현이 가능하다는 장점이 있다 (He & Chan 2016). 그러나 실내 구조나 사용자 밀도, AP 배치 변화 등에 민감하게 반응하여 신호의 변동성이 크고, multipath 현상이 위치 정확도에 부정적인 영향을 줄 수 있다 (Kotaru et al. 2015). 또한 위치 추정 성능은 radio map의 해상도에 크게 영향을 받는다. 해상도란 RP 간의 간격을 의미하며, 간격이 좁을수록 위치 표현이 정밀해지는 반면 연산량과 메모리 요구가 증가한다. 반면 간격이 넓어지면 계산 효율은 향상되지만 정확도는 감소하는 경향이 있다.
PDR은 스마트폰에 내장된 가속도계 및 자이로스코프 센서를 활용하여 걸음 수, 이동 거리, 방향 등을 기반으로 사용자의 경로를 추정하는 기술이다. PDR은 무선 인프라 없이도 실시간으로 위치를 추정할 수 있다는 장점을 지니며, Wi-Fi 신호 수신이 불안정하거나 환경 변화가 잦은 실내 공간에서도 위치 추정이 가능하게 한다. 그러나 PDR은 센서 오차가 누적되면서 시간이 지남에 따라 실제 경로와 추정 경로 간의 차이가 점점 커지는 PDR 누적오차 문제가 발생한다 (Jung 2024). 이러한 PDR 누적오차는 보행자의 보행 패턴, 스마트폰의 위치 변화, 센서 노이즈 등 다양한 요인에 의해 영향을 받는다. 결과적으로, 장시간 이동하거나 방향 변화가 많은 환경에서는 오차가 크게 누적될 수 있다. 따라서 PDR 기반의 경로를 활용하는 SC에서도, PDR 누적오차에 의한 경로 왜곡은 위치 정확도의 성능을 낮추는 주요 요인이 된다. 이를 보정하기 위해 최근 연구들은 PDR 경로의 회전, 이동, 필터링 등의 보정 기법을 적용하거나 무선 신호 기반 기법과의 융합을 통해 누적오차의 영향을 최소화하려는 시도를 진행하고 있다 (Mansour et al. 2021).
기존 fingerprinting 방식은 단일 지점에서 측정한 RSSI 벡터만을 활용하기 때문에 신호의 순간적인 변동성이나 환경 변화에 취약하며, 정확한 위치 추정에 한계가 있다. 이를 보완하기 위해 제안된 SC 기법은 사용자의 이동 중 수신된 RSSI 시퀀스를 PDR 기반 경로를 따라 누적하여 2차원 URS를 생성하고, 이를 사전에 구축된 radio map과 비교함으로써 위치를 추정한다 (Shin et al. 2023). URS는 사용자의 위치가 걸음이 검출된 시점에서만 업데이트되며, 걸음 간의 중간 구간이나 사용자가 정지한 상태에서는 추가적인 URS 생성이나 SC 위치 추정을 수행하지 않는다. 따라서 걸음이 검출되지 않은 시점에서의 사용자의 위치는 가장 최근에 추정된 SC 위치로 유지된다.
SC는 이처럼 RSSI의 누적 패턴을 반영함으로써, 기존 fingerprinting 방식에 비해 더 높은 위치 추정 정밀도를 제공한다 (Shin & Lee 2024). SC의 구조는 1) Radio map 생성, 2) URS 생성, 3) 상관도 계산, 4) 최적 위치 선택의 4단계로 구성되며, 이 절차는 Fig. 2에 시각적으로 제시하였다. Offline 단계에서는 사용자가 각 RP에서 수집한 RSSI 데이터를 기반으로 radio map을 구축하고, 이는 위치별 신호 강도를 층별로 구성한 2차원 행렬로 저장된다. Online 단계에서는 사용자의 PDR 기반 경로가 주어졌을 때, 해당 경로를 해상도 간격에 따라 URS를 생성하고, 이후 URS와 radio map을 비교하여 상관도를 계산함으로써 최종 위치를 추정한다. URS와 radio map 간의 상관도 계산에는 평균 절대 오차를 사용하였으며, 유효한 RSSI 값들을 기준으로 평균 절대 오차를 계산하고, 해당 오차가 최소가 되는 위치를 사용자 위치로 추정하였다. 이 과정은 식 (1, 2)와 같이 표현된다.
$$(\tilde{x}, \tilde{y}) =
\arg\min_{(m,n)}
\left(
\sum_{m=1}^{M-I+1}
\sum_{n=1}^{N-J+1}
\sum_{k=1}^{K}
\sum_{i=1}^{I}
\sum_{j=1}^{J}
\left|
URS_{i,j,k} – RM_{(m+i-1,\; n+j-1,\; k)}
\right|
\right)$$
여기서 URS와 radio map 전 영역에 걸친 correlation 계산과정을 보여준다. $(\tilde{x}, \tilde{y})$는 radio map 상에서 URS와 가장 매칭이 잘된 위치를 의미한다. $URS_{i,j,k}$는 URS의 $(i, j)$ 위치에서 k번째 AP의 RSSI 값이며, $RM_{(m+i-1,\; n+j-1,\; k)}$은 radio map의 $(m, n)$을 시작점으로 하는 영역 내의 $(i, j, k)$ 좌표의 RSSI 값이다. $I, J, K$는 각각 URS의 세로, 가로 AP 개수를 의미하며, $M, N$은 radio map의 세로, 가로 크기를 의미한다. 이후, 식 (1)에서 correlation 계산을 통해 얻어진 $(\hat{x}, \hat{y})$는 URS가 radio map 상에서 가장 높은 유사도를 보인 영역의 좌측 하단 좌표이며, 이는 URS 내부 좌표계에서 기준점 (0,0)에 해당한다. URS는 PDR 경로를 따라 누적된 이동 정보를 포함하고 있으며, 마지막 걸음의 상대 좌표 $(x^p_n, y^p_n)$를 기준점에 더함으로써 식 (2)와 같이 최종 사용자 위치 $(\hat{x}, \hat{y})$를 계산한다.
$$(\hat{x}, \hat{y}) = (\tilde{x} + x^{p}_{n},\; \tilde{y} + y^{p}_{n})$$
URS가 PDR 경로에 기반하여 생성되기 때문에, PDR 누적오차가 지속적으로 누적되면 URS의 공간 정렬이 실제 이동 경로와 어긋나게 되고, 이에 따라 radio map과의 상관도 계산 정확도 역시 저하된다. 이를 해결하기 위해 본 논문에서는 일정 범위의 회전 탐색을 통해 누적오차를 보정하는 방식을 적용하였다. PDR의 방향오차가 누적되는 부호를 모르기 때문에 양방향으로 보정을 진행한다. Fig. 3은 이러한 ±10° 회전 탐색 기반 보정 방식의 개념을 시각적으로 설명한다. 왼쪽은 누적된 PDR 오차로 인해 실제 경로와 어긋난 PDR 경로를 보여주며, 이를 −10°, 0°, +10°로 각각 회전한 뒤 URS를 생성하고 radio map과의 상관도 비교를 수행하는 과정을 나타낸다. 이 과정에서 각 회전 각도 $\theta$에 대해, PDR 경로는 식 (3)과 같이 2차원 회전 행렬, $R(\theta)$을 사용하여 회전된다.
$$\begin{bmatrix}
x_n^{R} \\
y_n^{R}
\end{bmatrix}
=
R(\theta)
\begin{bmatrix}
x_n \\
y_n
\end{bmatrix}$$
여기서 $x_n$, $y_n$는 각각 회전하기 전의 n번째 PDR 좌표를 의미하며, $x_n^{R}$, $y_n^{R}$는 각각 회전된 PDR 좌표를 나타낸다. Fig. 3의 오른쪽 구조는 각 회전 각도에 따른 상관도 계산 결과 중 가장 높은 유사도를 가지는 위치를 선택하는 과정을 보여준다. 이를 통해 URS와 radio map 간의 정렬 오차를 완화하고, 위치 추정의 정확도를 향상시킬 수 있음을 확인하였다.
본 논문에서는 SC 기법의 성능에 영향을 미치는 radio map 해상도 변화(1 m, 2 m, 3 m)에 따른 성능 차이도 분석하였다. 해상도가 낮을수록 정밀한 위치 표현이 가능하지만 연산량이 증가하고, 반대로 해상도가 높을수록 계산 효율은 향상되나 위치 정확도는 저하되는 경향이 있다. 따라서 해상도(1 m, 2 m, 3 m)와 PDR의 스텝당 방향오차 크기 조합에 따른 위치 추정 성능을 시뮬레이션을 통해 평가하고, 평균 위치 오차 및 RMSE를 기준으로 정확도와 연산 효율 간의 trade-off를 분석하였다. 누적 RSSI 패턴 기반 상관도 방식은 기존 연구에서도 높은 정확도와 빠른 수렴 속도를 입증한 바 있다 (Lee et al. 2019). 이러한 PDR 누적오차 보정 기법과 해상도 설정이 위치 추정 정확도에 어떤 영향을 미치는지 확인하기 위해, 3장에서는 다양한 조건의 시뮬레이션 분석 결과를 제시하였다.
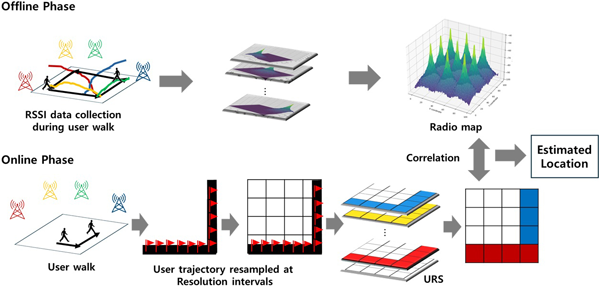
Fig. 2. Workflow of SC-based indoor localization (offline and online phases).
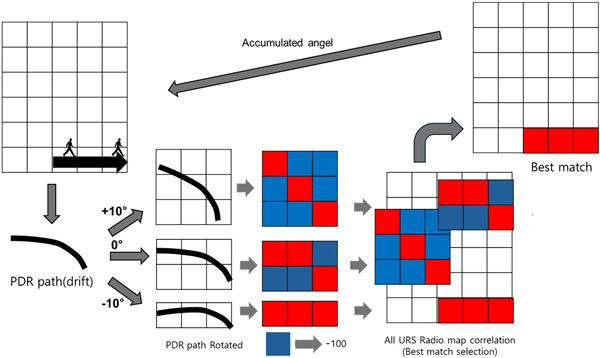
Fig. 3. ±10° angle-based correction process for PDR drift in SC localization.
SC 기법의 PDR누적오차 보정 효과와 radio map 해상도에 따른 성능 차이를 분석하기 위해 시뮬레이션을 수행하였다. 시뮬레이션에 사용된 RSSI 모델은 식 (4)와 같다.
$$RSSI(d) = RSS_{d_0} – n \cdot \log_{10}\!\left( \frac{d}{d_0} \right) + N(0, \sigma^{2})$$
여기서 d는 AP와의 거리, $RSS_{d_0}$는 기준 거리에서의 RSSI (–40 dBm), n은 경로 손실 계수이며, N(0, σ²)은 평균 0, 분산 σ²인 노이즈 항이다. 위치 오차는 식 (5)를 통해 산출하였는데, $(x_t, y_t)$는 true 위치를 나타낸다.
$$E = \sqrt{(\hat{x} – x_{t})^{2} + (\hat{y} – y_{t})^{2}}$$
주요 시뮬레이션 파라미터는 Table 1에 정리하였다.
Table 1. Simulation parameters.
| Parameter | Value |
|---|---|
| Grid size (m) | 100* 100, 50*50, 33*33 |
| AP positions | (20, 20), (50, 20), (80, 20) (20, 50), (50, 50), (80, 50) (20, 80), (50, 80), (80,80) |
| Max RSSI distance (m) RSSI (dBm) Radio map RSSI noise (dBm) User RSSI noise (dBm) Step length (m) Turn interval (steps) Turn angle (°) Drift per step (°) URS buffer size | 40 -40 1 3 0.6 100 90 0.5, 0.3,0.1 50 |
시뮬레이션은 radio map 해상도(1 m, 2 m, 3 m)와 PDR 누적오차(0.1, 0.3, 0.5)를 변수로 하여 구성되었다. 고해상도는 정밀한 URS 구성을 가능하게 하나 연산량이 크고, 저해상도는 계산 효율은 높지만 위치 정확도는 떨어지는 trade-off가 존재한다. 또한 PDR 누적오차가 클수록 URS의 정렬이 왜곡되어 radio map과의 상관도 계산이 부정확 해진다. 그렇기 때문에 결과적으로 위치 추정 성능이 저하된다. 이를 보완하기 위해 본 연구에서는 차량 환경에서 제안된 기존 SC 기법의 ±10° 회전 탐색 방식을 참고하였다 (Shin et al. 2024). 차량과 보행자의 경로 생성 방식은 DR과 PDR로 차이가 있으나, SC 알고리즘 구조는 동일하므로 보정 방식 또한 동일하게 적용된다. 다만, 보행자의 경우 더 빈번한 방향 전환과 짧은 이동 단위를 갖는 PDR 특성상, 적용하는 회전 보정 범위는 환경에 따라 조정될 수 있다. Fig. 4는 해상도와 누적오차 조합에 따라 구성된 시뮬레이션 환경을 시각적으로 보여준다. 각 그림은 좌측에 2D RSSI radio map과 사용자 이동 경로를, 우측에는 RSSI 분포의 3D surface를 나타낸다.
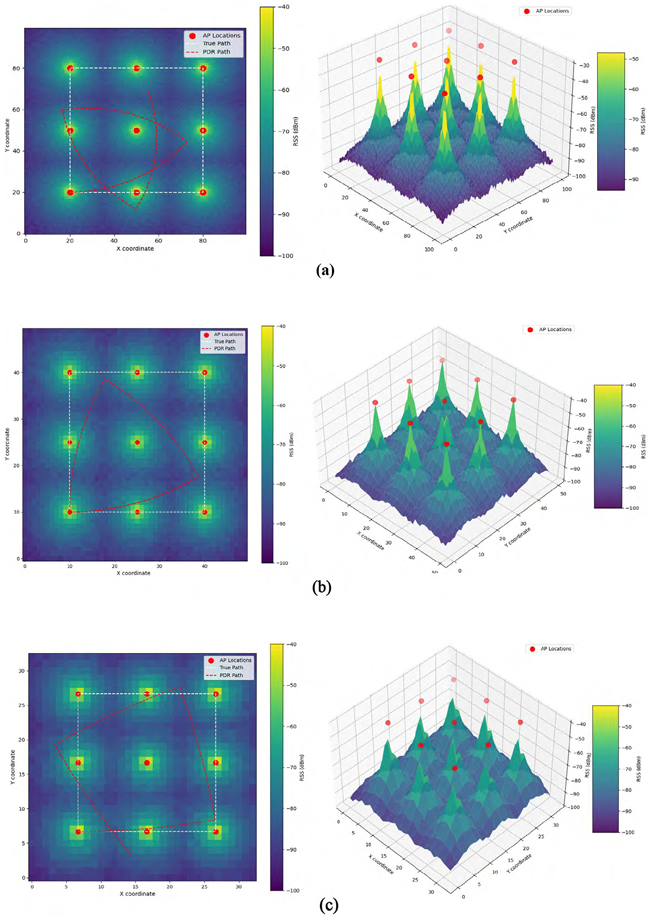
Fig. 4. AP placement and simulation path. (a) 1 m PDR drift 0.5, (b) 2 m PDR drift 0.3 (c) 3 m PDR drift 0.1.
Tables 2는 각각 PDR 누적오차가 각각 0.5, 0.3, 0.1일 때의 위치 추정 성능(Mean, RMSE, Max error)을 보여준다. 해상도가 낮을수록 전반적인 정확도가 향상되며, PDR 누적오차가 증가할수록 모든 오차 지표가 악화된다. Table 3은 해상도에 따른 연산 시간 비교 결과를 보여주며, 1 m 해상도의 경우 가장 높은 정확도를 보였으나 연산 소요 시간은 가장 길었다.
Table 2. Localization performance analysis under various radio map resolutions.
| Resolution (m) | Drift=0.5 | Drift=0.3 | Drift=0.1 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean error (m) | RMSE (m) | Max error (m) | Mean error (m) | RMSE (m) | Max error (m) | Mean error (m) | RMSE (m) | Max error (m) | |
| 1 2 3 | 2.119 2.758 3.163 | 2.699 3.453 3.555 | 9.265 12.781 8.857 | 1.915 2.606 3.449 | 2.568 3.192 3.924 | 9.108 9.035 8.857 | 1.851 2.946 3.635 | 2.472 3.756 4.251 | 8.352 11.873 12.343 |
Table 3. Computation time by radio map resolution.
| Resolution | Time |
|---|---|
| 1 m (s) 2 m (s) 3 m (s) | 107.8 42.6 37.9 |
Fig. 5는 해상도와 PDR 누적오차 조건에 따른 CDF 및 step별 위치 오차 분포를 시각화한 결과이다. CDF 분석 결과, PDR 누적오차가 증가할수록 누적 오차가 우측으로 이동하는 경향을 보였으며, 해상도 1 m의 경우 가장 안정적인 분포를 나타냈다. 특히 Table 4의 90% CDF 누적 오차 기준에서도 해상도 1 m가 항상 가장 낮은 오차 값을 기록하였다. 예를 들어, PDR 누적오차가 0.5인 경우 1 m 해상도에서는 90% 누적 오차가 4.4 m인 반면, 3 m 해상도에서는 7.1 m로 나타나 성능 차이가 확인되었다. 또한 step별 오차 분석에서는 해상도 3 m에서 오차 분산이 크고 결과가 불안정한 양상을 보였지만, 해상도 1 m에서는 누적오차 변화에도 불구하고 비교적 일정한 오차 분포를 유지하여 높은 안정성을 나타냈다.

Fig. 5. CDF and stepwise error comparison under different drift and resolution settings. (a) 0.5° Drift: CDF and stepwise error for 1 m, 2 m, 3 m resolutions, (b) 0.3° Drift: CDF and stepwise error for 1 m, 2 m, 3 m resolutions, (c) 0.1° Drift: CDF and stepwise error for 1 m, 2 m, 3 m resolutions.
Table 4.90% CDF-based position error under various resolutions and drift conditions.
| Resolution | CDF | ||
|---|---|---|---|
| Drift=0.5 | Drift=0.3 | Drift=0.1 | |
| 1 m 2 m 3 m | 4.4 m 5.9 m 7.1 m | 3.8 m 5.2 m 6.6 m | 3.5 m 4.9 m 6.3 m |
이 논문은 SC 기반 실내 위치 추정에서 PDR 누적오차 및 radio map 해상도가 성능에 미치는 영향을 시뮬레이션을 통해 분석하였다. ±10° 회전 탐색 기반 PDR 누적오차 보정 기법은 모든 실험 조건에서 위치 오차를 감소시키는 효과를 보였으며, 특히 고해상도 radio map 환경에서 그 효과가 두드러지게 나타났다. 또한 해상도와 PDR 누적오차는 독립적인 성능 요소가 아닌, 서로 영향을 주는 상호작용 변수로 확인되었다. 예를 들어, PDR 누적오차가 큰 환경에서는 저해상도 radio map이 오히려 정렬 오차를 민감하게 반영하여 성능이 저하되었고, 고해상도의 경우 상대적으로 더 낮은 평균 위치 오차와 RMSE를 기록하였다. 반대로, PDR 오차가 작을 경우, 고해상도 radio map은 정밀한 URS 매칭을 가능하게 하여 90% 누적오차 기준이 가장 낮은 결과를 보여주었다. 이러한 결과는 PDR 오차 수준에 따라 radio map 해상도를 전략적으로 조정해야 함을 시사하며, 정확도와 연산 효율성 간의 trade-off를 고려한 위치 추정 시스템 설계 기준을 제공한다. 향후 연구에서는 회전 탐색 각도의 자동 최적화, URS 버퍼 크기의 동적 조절, 그리고 다양한 실제 실내 환경에서의 실험적 검증을 통해 본 연구 결과의 실용성과 확장 가능성을 더욱 강화할 계획이다.
This research was supported by the MSIT (Ministry of Science and ICT), Korea, under the National Program for Excellence in SW supervised by the IITP (Institute of Information & Communications Technology Planning & Evaluation) in 2025 (2024-0-00064).
Conceptualization, J.K. and B.S.; methodology, J.K. and B.S.; software, J.K.; validation, B.K and B.S.; investigation, J.K. and B.S.; writing—original draft preparation, J.K.; writing—review and editing, B.K. and B.S.; visualization, J.K.; supervision, B.S.; project administration, B.S.
The authors declare no conflict of interest.
Bahl, P. & Padmanabhan, V. N. 2000, RADAR: An in-building RF-based user location and tracking system, In Proceedings IEEE INFOCOM 2000, Tel Aviv, Israel, 26–30 March 2000, pp.775–784. https://doi.org/10.1109/INFCOM.2000.832252
He, S. & Chan, S.-H. G. 2016, Wi-Fi fingerprint-based indoor positioning: Recent advances and comparisons, IEEE Communications Surveys & Tutorials, 18, 466–490. https://doi.org/10.1109/COMST.2015.2464084
Jung, Y. 2024, A study on PDR and sparse UWB based stochastic indoor localization, Master’s Thesis, Hanyang University, Department of Electrical and Biomedical Engineering.
Kotaru, M., Joshi, K., Bharadia, D., & Katti, S. 2015, SpotFi: Decimeter level localization using WiFi, In Proceedings of ACM SIGCOMM, London, UK, August 2015, pp.269–282. https://doi.org/10.1145/2785956.2787487
Lee, J. H., Shin, B., Shin, D., Park, J., Ryu, Y. S., et al. 2019, Surface correlation-based fingerprinting method using LTE signal for localization in urban canyon, Sensors, 19, 3325. https://doi.org/10.3390/s19153325
Mansour, A., Chen, W., Luo, H., Li, Y., Wang, J., et al. 2021, Drift control of pedestrian dead reckoning (PDR) for long period navigation under different smartphone poses, Eng. Proc., 10, 21. https://doi.org/10.3390/ecsa-8-11302
Noh, H.-M., Oh, Y.-J., Lee, N.-Y., & Shin, W.-J. 2021, A survey of deep learning-assisted indoor localization with Wi-Fi fingerprinting: Current status and research challenges, Journal of Korean Institute of Communications and Information Sciences, 46, 848–862. https://doi.org/10.7840/kics.2021.46.5.848
Shin, B., Kim, T., Kyung, H., Yu, C., Shin, D., et al. 2024, Vehicle tracking system in underground parking lots using smartphone, IEEE Transactions on Intelligent Transportation Systems, 25, 16938–16952. https://doi.org/10.1109/TITS.2024.3435523
Shin, B., Lee, J. H., & Lee, T. 2023, Novel indoor fingerprinting method based on RSS sequence matching, Measurement, 223, 113719. https://doi.org/10.1016/j.measurement.2023.113719
Shin, B. & Lee, T. 2024, Analysis of localization technology performance based on accumulated RSSI signal using simulation, JPNT, 13, 331–339. https://doi.org/10.11003/JPNT.2024.13.3.331
Tran, D. A. & Zhang, T. 2015, An online algorithm for fingerprint-based location tracking, In Proceedings of the IEEE 11th International Conference on Mobile Ad Hoc and Sensor Systems, 28–30 October 2014, Philadelphia, PA, USA, pp.389–397. https://doi.org/10.1109/MASS.2014.123