Yongrae Kim1![]() , Heeseob Kim2
, Heeseob Kim2![]() , Jeongrae Kim1†
, Jeongrae Kim1†![]()
1Department of Aeronautical and Astronautical Engineering, Korea Aerospace University, Gyeonggi-do 10540, South Korea
2Satellite Application Research Team at Korea Aerospace Research Institute (KARI), Daejeon 34133, South Korea
Citation: Kim, Y., Kim, H., & Kim, J. 2025, Simulation of Orbit, Clock, and Ionospheric Corrections for a Regional Navigation Satellite System, Journal of Positioning, Navigation, and Timing, 14, 265-274.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2025 September, Volume 14, Issue 3, pages 265-274. https://doi.org/10.11003/JPNT.2025.14.3.265
Received on Aug 11, 2025, Revised on Aug 22, 2025, Accepted on Aug 24, 2025, Published on Sep 15, 2025.
Copyright © The Institute of Positioning, Navigation, and Timing
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Global navigation satellite system (GNSS) provides position, velocity, and timing information globally, but single-frequency receivers are limited by errors such as satellite orbit, clock, and especially ionospheric delay. While satellite-based augmentation system (SBAS) improves accuracy by supplying orbit, clock, and ionospheric corrections, realistic simulation tools are required to effectively develop and validate such systems. This study presents a MATLAB-based simulator that generates GNSS observations, computes corrections via precise orbit determination using extended Kalman filtering (EKF), and constructs grid-based ionospheric maps from dual-frequency measurements. The simulator, focused on positioning accuracy rather than integrity, is evaluated using a virtual quasi-zenith satellite system (QZSS) constellation with global positioning system (GPS) under intense ionospheric conditions in Japan. The performance of the simulator was analyzed at the MIZU ground station and further assessed across 36 virtual stations to demonstrate the spatial effectiveness of the correction information.
RNSS, GNSS simulation, pseudorange, orbit determination, ionospheric delay correction
전지구 위성항법시스템 (Global Navigation Satellite System, GNSS)의 측위정확도는 항법위성의 궤도 및 시계오차, 대기에 의한 신호지연에 의해 제한되는데, 별도의 보정정보를 사용하면 이러한 제한요소를 완화하고 정확도를 향상시킬 수 있다. 주로 사용되는 보정정보는 궤도 및 시계오차 보정정보이며, 단주파 수신기 사용자를 위한 전리층 보정정보도 사용된다. 보정정보 전송 방법으로는 위성신호를 이용한 방법과 인터넷 및 기타 통신망을 이용한 방법으로 나뉘는데, Satellite-Based Augmentation System (SBAS)는 지구정지궤도위성을 이용하고, International GNSS Service (IGS) Real-Time Service (RTS)는 인터넷을 이용한다. SBAS는 코드의사거리를 이용하는 사용자를 위한 서비스로 Global Positioning System (GPS) L1 단주파 수신기를 사용하는 항공기를 대상으로 하는 서비스로 시작하였으나, 최근 이중주파수와 다중 GNSS를 사용하는 서비스로 진화하고 있다 (Kim et al. 2024b). SBAS는 궤도, 시계 및 전리층 정보 외에 항공기 정밀접근에 필요한 무결성정보도 제공하여 항법신호의 안정성을 유지할 수 있도록 하고 있다. 항공기 이외에 일반 사용자들도 SBAS 보정정보를 이용하면 측위정확도와 안정성을 향상시킬 수 있다. 2003년 미국의 Wide Area Augmentation System (WAAS)를 시작으로 유럽의 European Geostationary Navigation Overlay Service (EGNOS), 일본의 Multi-functional Satellite Augmentation System (MSAS) 및 한국의 Korea Augmentation Satellite System (KASS) 등이 운영 중이다 (SBAS IWG 2021, Ahn 2023, EGNOS User Support 2025, FAA 2025, NEC 2025). SBAS 보정정보 정확도는 궤도오차의 경우 수십 cm 수준으로 반송파 사용자를 위한 RTS의 수 센티미터에 비해서는 낮은 정확도를 가진다.
지역 위성항법시스템 (Regional Navigation Satellite System, RNSS)은 특정한 지역만을 서비스하기 위하여 지구동기궤도위성 (Geo-Synchronous Orbit, GSO)이나 지구정지궤도위성 (Geostationary Orbit, GEO)을 사용하는 항법시스템으로 일본의 Quasi-Zenith Satellite System (QZSS)나 인도의 Navigation with Indian Constellation (NavIC) 등이 있다. QZSS는 4기의 Inclined GSO (IGSO) 위성과 3기의 GEO 위성으로 구성되는데, 2025년 8월 현재 5기 위성이 운영되고 있으며, 2026년까지 위성 배치를 완료하는 것을 목표로 하고 있다. IGSO 위성을 이용하면 높은 경사각으로 수신하는 의사거리 신호가 증가하여, 가시성이 제한되는 도심 지역에서의 항법성능을 높일 수 있다는 장점이 있으며, RNSS는 GNSS 이상 발생 시 대체 항법으로 사용 가능하다. 일본은 MSAS를 QZSS에 통합하기 위한 시도를 하고 있는데, 현재 QZS-3 위성을 이용하여 MSAS 보정정보를 송신하고 있으며, 향후 2기의 QZSS 위성에서 MSAS 보정정보를 송신할 계획이다 (Sakai 2018, Saito 2019). MSAS는 일본 내에 위치한 제한된 지상국 분포와 낮은 지자기위도로 인한 높은 전리층 지연 효과로 인해 WAAS에 비해서는 보정정보 성능이 높지 않지만, 위치정확도 향상 및 안전성 향상에 기여하고 있다 (Jeong & Kim 2008). MSAS 신호는 국내에서도 수신이 가능하므로 국내 연구자들에 의해 MSAS 보정정보의 일본 내륙에서의 성능 및 국내에서의 성능에 관한 연구가 수행되었다 (Jeong & Kim 2009, Lim & Park 2017, Hwang et al. 2021, Kim et al. 2024a). GNSS나 RNSS 단독 사용 시 위치정확도나 GPS에 SBAS 결합 시 위치정확도에 관한 연구결과는 어느 정도 제시되었으나, GNSS와 RNSS를 동시에 사용하면서 SBAS 보정정보를 적용한 연구는 찾기 어렵다.
본 연구에서는 GNSS와 RNSS 동시 사용 시 항법위성 궤도/시계 및 전리층 보정정보를 적용할 경우 예상되는 위치정확도 향상 효과를 S/W 시뮬레이션 기법을 이용하여 분석하였다. GPS와 QZSS L1 단주파 코드의사거리 신호를 사용하는 저가형 수신기를 가정하고, 자체 생성한 보정정보를 적용하여 위치정확도 향상 효과를 예측하였다. 보정정보는 위성 궤도결정 모듈 및 전리층 지연 추정 모듈을 통해 생성하였으며, 생성된 보정정보의 성능은 MSAS 보정정보와 비교를 통해 유사한 성능을 나타내도록 조정하였다. 또한 실제 GPS 위성 궤도와 전리층 분포 데이터를 활용하여 의사거리 정확도를 구현함으로써 가능한 실제 환경에 근접하도록 하였다. 다만 본 연구는 보정정보에 의한 위치정확도 향상 효과를 중점적으로 분석하였으며, SBAS에서 제공되는 무결성 기능은 고려하지 않았고, QZSS는 현재 배치 단계임을 감안하여 시뮬레이션 궤도를 적용하였다. 이러한 환경에서 시뮬레이터를 활용해 육지가 아닌 해상 등 가상의 지점에 위치한 지상사용자에게 예상되는 위치정확도를 파악할 수 있으며, 지상감시국 배치에 따른 보정정보 성능 변화 등도 분석할 수 있다.
2장에서는 시뮬레이터 구조에 대해 설명하고, 3장에서는 항법위성 궤도/시계 및 전리층 보정정보 생성기법에 대해 설명한다. 4장에서는 시뮬레이션으로 생성한 신호 및 보정정보를 기존 GPS/MSAS의 오차 수준과 비교, 분석한 결과를 제시하였다. 5장에서는 시뮬레이터를 이용하여 분석한 일본 내 지상사용자의 위치정확도를 분석하였다.
MATLAB 기반의 시뮬레이터는 3개 모듈로 구성되는데, 이는 (1) GPS 및 QZSS 코드의사거리 생성모듈, (2) 궤도 및 전리층 보정정보 생성모듈 및 (3) 사용자 위치추정모듈이다. 코드의사거리는 Receiver Independent Exchange Format (RINEX) 형식의 관측데이터 파일로 저장되어 일반 GNSS S/W에서도 사용할 수 있게 하였으며, 관측데이터 이외에 항법메시지도 생성하여 위치추정모듈에서 사용한다. 보정정보 생성모듈은 실제 GPS 데이터 처리도 가능한 추정모듈을 사용하였는데, SBAS 무결성정보는 생성하지 않았다. 코드의사거리 관측데이터에 보정정보를 적용하여 사용자 위치해를 추정하게 된다.
실제 환경을 유사하게 재현하기 위하여 가용 가능한 실제 데이터를 최대한 사용하였다. 시뮬레이션 날짜의 실제 IGS GPS 정밀궤도력 (final product)과 IGS 전리층 지도 (Global Ionosphere Map, GIM)를 사용하여 의사거리 신호를 생성하였다. 단, QZSS는 7개 위성 배치가 완료되지 않은 상황이므로 시뮬레이션 궤도를 사용하였다. 위치해 계산 시에는 SBAS와 유사하게 항법메시지의 방송궤도력의 궤도 및 시계정보에 보정정보를 가하는 방법을 사용하였는데, GPS의 경우 실제 항법메시지를 사용하여 방송궤도력 오차를 재현하였다. QZSS는 실제 방송궤도력 오차 수준을 가지는 시뮬레이션 방송궤도력을 사용하였다. Fig. 1은 시뮬레이터 구조를 나타내고 있다.
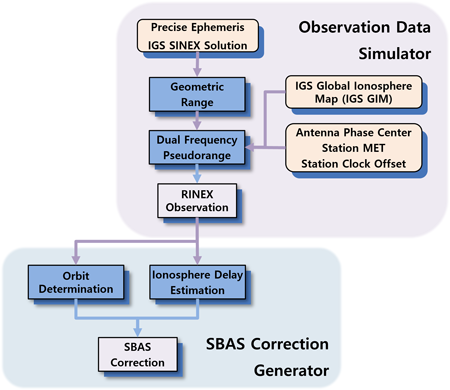
Fig. 1. Block diagram of the correction performance analysis simulator.
GNSS 의사거리를 시뮬레이션하기 위해서는 항법위성의 위치정보와 수신기 위치정보를 이용하여 기하학적 거리 (geometric range)를 계산한 뒤, 대기오차 및 노이즈 등을 추가하는 과정을 거치게 된다. 이러한 이유로 실제에 근접한 위성 궤도정보를 사용하는 것은 시뮬레이션 의사거리의 사실성을 높이는 데 중요하다. 또한, 시뮬레이션 의사거리를 이용하여 궤도결정을 수행하기 때문에, 실제궤도와 유사할수록 의사거리에 포함된 위성 궤도정보를 추정하는 궤도결정필터의 충실도를 확인하는데 적합하다.
GPS 궤도는 IGS 정밀궤도력을 사용하였는데, Root Mean Square (RMS) 3 cm 정확도를 가지므로 실제 궤도에 매우 가깝다고 할 수 있다. IGS 정밀궤도력은 15분 단위로 제공되므로 시뮬레이션 시에는 내삽을 사용하여 궤도 정보를 추출하였다. GPS 위성 시계오프셋도 IGS 정밀궤도력을 사용하였는데, 궤도에 비해 변화가 완만하므로 낮은 차수의 내삽을 이용하여 시계오프셋 정보를 추출하였다.
위성 배치가 진행 중인 QZSS는 시뮬레이션 궤도를 사용하였다. 향후 QZSS 운용 계획에 맞추어 IGSO, GEO, QuasiGeostationary Orbit (QGEO) 궤도를 포함한 7기 위성 기반의 가상 궤도 모델을 구현하였다. 위성동역학모델을 사용하여 위성궤도를 수치적분 기법을 이용하여 계산하였다. QZS-7 위성의 경우 경사각이 2。로 지구동기궤도에 속하지만 정지궤도에 근접하므로 QGEO라는 명칭으로 불린다 (Kenji 2023). Fig. 2는 QZSS 위성 7기의 지상궤적을 나타내고 있다.
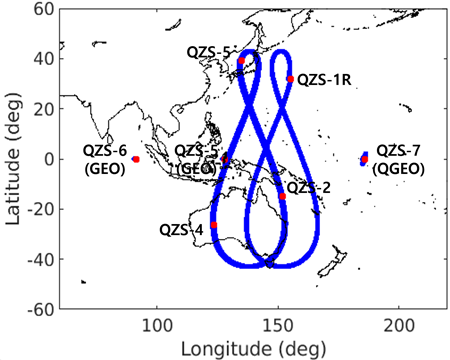
Fig. 2. Ground tracks of simulated 7 QZSS satellite orbits on August 7, 2024.
시뮬레이션에서 사용하는 궤도는 두 가지가 있는데, 의사거리 생성 시에 사용하는 궤도와 사용자 위치해 추정 시에 사용하는 궤도가 있다. 시뮬레이션에서는 전자를 truth 궤도, 후자를 nominal 궤도라 지칭한다. 두 개 궤도의 차이가 위치해 오차를 유발하는 주요 요인이므로 정교한 모델링이 필요하다. GPS의 경우 실제 항법메시지의 방송궤도력을 그대로 위치해 추정에 사용하여 위성궤도 오차 수준을 달성하였다. QZSS의 경우 시뮬레이션 궤도를 truth 궤도로 사용하기 때문에 적절한 노이즈를 가하여 nominal 궤도를 생성하게 된다. 운용 중인 QZSS 방송궤도력의 오차 수준은 약 2 m 수준이므로 이에 해당하는 노이즈를 truth 궤도에 더하여 nominal 궤도를 생성하였다.
시뮬레이터에서 생성한 코드의사거리는 수신기와 위성 간의 기하학적 거리 $\rho$에 다양한 오차 항을 합산하여 Eq. (1)과 같이 표현된다.
$$P
=
\rho
+
\left( \Delta t^{rcv} – \Delta t_{sat} \right) \times c
+ I
+ T
+ \Delta _{rel}
+ \left( b^{rcv} + b_{sat} \right)
+ \Delta _{ant}
+ \varepsilon$$
여기서 $\Delta t^{rcv}$와 $\Delta t_{sat}$는 각각 수신기 및 위성 시계오프셋을 의미하고, $I$와 $T$는 전리층 및 대류층 지연을 의미한다. $\Delta_{rel}$은 상대성 효과에 따른 보정값을 나타내고 $b^{rcv}$,$b_{sat}$은 각각 수신기와 위성의 differential code bias (DCB)를 의미한다. $\rho$는 위성 질량중심과 수신기 안테나 위상중심까지의 거리인데, $\Delta_{ant}$항은 위성 질량중심과 위성 안테나 위상중심까지의 거리차를 보정해주는 항이다. $c$는 광속을 의미하며, $\varepsilon$은 수신기 노이즈 및 다중경로 오차 등 모델링 되지 않은 오차를 포함한다.
GPS 위성궤도는 IGS 정밀궤도력 데이터를 보간하여 생성하였으며, QZSS 위성궤도는 시뮬레이션 궤도를 사용하여 생성하였다. 데이터 기준시점은 의사거리 수신시점인데, 의사거리 전송시점의 위성위치와 차이가 발생하므로 time of flight (TOF)를 고려하여 보정된 궤도정보를 사용하였다. GPS 위성 시계오프셋은 IGS 정밀궤도력을 사용하였으며, QZSS 위성 시계오프셋은 사용자가 입력할 수 있도록 설정하였다. 수신기 시계오프셋 역시 사용자가 입력할 수 있는데, IGS 기준국의 경우 IGS에서 정밀 시계오프셋 추정값을 제공하기 때문에 IGS 기준국을 수신기로 설정하는 경우 해당 시계오프셋값을 사용할 수도 있다.
전리층 지연값은 IGS GIM 데이터를 사용하여 생성하였다. 수신기와 위성의 위치로부터 ionospheric pierce point (IPP)를 계산한 뒤, 전리층 지도의 주변 4개 격자점 데이터를 보간하는 방식으로 전리층 지연값을 계산하였다. 대류층 지연값은 여러 가지 모델을 선택할 수 있는데, Modified Hopfield 모델에 온도, 압력 등 실제 기상 관측데이터를 사용하여 생성하는 것도 가능하다. DCB는 전리층 보정정보 생성 시 중요한 값이므로 실제값을 적용하였다. GPS 위성 DCB의 경우 IGS GIM에서 제공하는 값을 사용하고, QZSS 위성 DCB의 경우 사용자가 상수값을 설정하도록 하였다. 수신기 DCB의 경우 사용자가 설정한 값을 적용하는데, IGS 기준국은 IGS GIM의 수신기 DCB를 사용할 수도 있다.
의사거리는 위성안테나 위상중심과 수신기안테나 위상중심 사이의 거리인데, IGS 정밀궤도력은 위성질량중심 좌표를 제공하므로 이를 이용하여 의사거리를 생성할 경우 변환이 필요하다. IGS Antenna Exchange Format (ANTEX) 파일의 태양방향벡터를 적용하여 위성의 안테나 위상중심과 질량중심 차이에 의한 의사거리 차이를 계산하여 $\Delta_{ant}$ 항에 적용하였다. IGS 기준국을 사용하는 경우 기준점 좌표와 안테나 위상중심이 상이한 경우 이를 보정해주어야 하는데, 이러한 보정값도 $\Delta_{ant}$ 항에 적용된다.
코드의사거리 노이즈 $\varepsilon$의 표준편차는 약 30 cm이며, 시뮬레이션에서는 경사함수 (slant factor)를 적용하여 경사각이 낮은 위성의 경우 노이즈 크기가 증가하도록 모델링하였다. 이는 수신기 노이즈뿐만 아니라 저경사각에서 발생하는 다중경로 오차를 반영한 것이다. 궤도결정을 위해서는 반송파를 이용하는데, 이를 위해서 본 시뮬레이터에서는 노이즈 수준이 매우 낮은 의사거리 신호도 별도로 생성하여 궤도결정에 사용하였다. 이는 노이즈 $\varepsilon$의 크기를 반송파와 유사한 cm 수준으로 설정한 것으로 다른 오차 성분은 코드의사거리와 유사하며, 모호정수는 적용하지 않았다. 전리층 보정정보 생성을 위해서는 이중주파수 관측값이 필요하므로 L2 코드 관측값도 생성하며, 이는 궤도결정 시에도 사용된다.
의사거리 시뮬레이터에서 생성한 코드의사거리 관측값에 보정정보 모듈에서 생성한 궤도, 시계 및 전리층 보정정보를 적용하여 사용자 위치해를 추정하는 기능을 수행한다. 위치추정은 최소자승법을 사용하여 매 관측시점마다 수행하였다. RINEX 형식의 관측데이터와 항법메시지를 입력데이터로 사용하여 실제 관측데이터도 처리 가능하다. 단, 보정정보는 시뮬레이터 고유형식을 사용하였다. 시뮬레이션에서는 의사거리 관측데이터 생성 시 적용되는 truth 환경과, 위치추정 시 적용되는 nominal 환경을 구분하였다. Truth 환경은 다양한 오차 요인을 포함해 의사거리를 생성하는데 활용되며, nominal 환경은 보정정보 적용 후 위치해를 추정하는 기준 환경으로 사용된다. 따라서 nominal 환경에는 별도의 의사거리 잡음 모델을 적용하지 않는다. Table 1은 이러한 truth 환경과 nominal 환경의 차이를 정리한 것이다.
Table 1. Data source and simulation parameters.
| Item | Truth | Nominal |
|---|---|---|
| Date | 2024. 08. 04 ~ 2024. 08. 10 | – |
| Timestep | 30 seconds | – |
| Satellite orbit | IGS final (GPS), Simulated truth orbit (QZSS) | Broadcast (GPS), Simulated nominal orbit (QZSS), Orbit correction |
| Satellite clock offset | IGS final (GPS), Simulated truth clock (QZSS) | Broadcast (GPS), Simulated nominal clock (QZSS), Clock correction (estimate) |
| Receiver clock offset | IGS clock estimation | – |
| Ionospheric delay | IGS global ionosphere map | Klobuchar model |
| Tropospheric delay | Modified Hopfield model (with meteorological data) | MOPS |
| Satellite DCB | IGS GIM/GPS TGD | GPS TGD |
| Receiver DCB | IGS GIM | – |
| Satellite ANT offset | IGS ANTEX | IGS ANTEX |
| Maskangle | 10° | Input |
| Pseudorange noise | 0.3 m | – |
위성동역학모델과 확장칼만필터를 결합한 궤도결정 모듈을 사용하여 GPS와 QZSS 위성의 궤도와 시계오프셋을 추정하였다. 위성동역학모델은 중력모델, 비중력모델 및 정밀좌표변화 모델을 포함한다 (Kim et al. 2022). 중력모델은 조화함수 (spherical harmonics) 기반의 중력장모델을 사용하여 비구면 중력장효과를 모사하였고, 달과 태양의 3체 중력모델도 포함하였다. Grace Gravity Model 03 (GGM-03) 중력장 모델은 degree와 order를 각각 12차까지 사용하였다. 조석에 의한 중력변화모델 (tide model)도 적용하였다. 비중력모델은 태양복사압 모델을 포함하는데, 간단한 cannon-ball 모델을 사용하였다. cm 정확도의 정밀궤도결정은 정교한 box 모델 등을 사용해야 하지만, 본 연구에서는 수십 cm 정도의 정확도수준을 요구하므로 비교적 간단한 모델을 사용하였다.
동역학 모델을 이용하여 궤도전파를 수행한 후, 관측데이터를 이용해 보정하는 칼만 필터 방식을 적용하였다. 시뮬레이션에서는 의사거리 관측값을 사용하였으며, 이는 반송파 의사거리 수준의 노이즈를 가지지만 모호정수를 포함하지 않는다. 필터의 추정 변수는 Eq. (2)와 같이 구성하였다.
$$\hat{x}
=
\bigl[
r_x,\;
r_y,\;
r_z,\;
v_x,\;
v_y,\;
v_z,\;
\Delta t^{sat},\;
C_r,\;
E_R,\;
E_A,\;
E_C
\bigr]^{T}$$
추정변수는 Earth-Centered Inertial (ECI) 위치 $r_i$ 및 속도 $v_i$ 이외에 위성의 시계오프셋 $\Delta t^{sat}$을 추정한다. 태양복사압 모델의 경우 태양복사압상수 $C_r$를 추정하고, 모델링되지 않은 비중력가속도를 모델링하기 위하여 radial, along track, cross track 방향으로 경험가속도 (empirical parameter) 모델을 적용하고 각 성분 $E_i$를 추정하였다.
Fig. 3은 궤도결정 모듈의 전체적인 구조를 나타내고 있다. 현재 구현된 코드는 다중 지상국에서 수신된 의사거리신호를 이용하여 1개 항법위성의 궤도결정을 수행하는 방법으로 복수의 위성궤도결정은 궤도결정필터를 반복하여 실행하는 방법으로 수행한다. 이는 각 위성의 궤도결정 시 병렬처리가 가능하여 연산시간을 단축시킬 수 있는 장점이 있다. 추정된 궤도오차는 수십 cm 수준으로 SBAS와 유사한 수준이다. 궤도 및 시계 보정정보는 SBAS와 유사하게 항법메시지와의 차이 형태로 생성한다. 이를 위해 nominal GPS 및 QZSS 궤도를 읽은 뒤 궤도결정결과와의 차이를 보정정보 값으로 출력하게 된다. 보정정보 생성 간격은 입력값으로 지정 가능하여, 긴 생성 간격 사용 시 보정정보 시간경과 (message time-out)에 의한 효과 등도 파악할 수 있다.
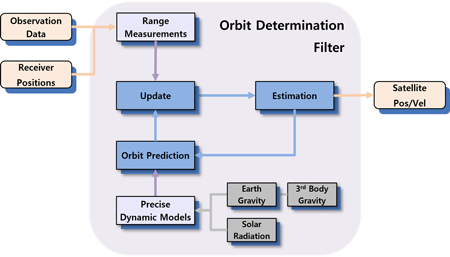
Fig. 3. Block diagram of the orbit determination filter.
다수의 지상감시국을 기준으로 생성한 이중주파수 의사거리 시뮬레이션 값을 이용하여 GPS 이중주파수 코드의사거리로부터 전리층 지연값을 추정하였다. 전리층 지연 추정에는 GPS 관측값만을 사용하였는데, 이는 GPS가 QZSS에 비해 IPP의 범위가 넓어 QZSS 관측값을 추가로 사용할 필요가 없기 때문이다. 전리층 지연은 위도, 경도 및 시간을 변수로 하는 다변수 다항식 함수모델을 통해 추정하였다 (Han 2004). 하지만 함수모델은 지역 전리층 전체를 평균한 형태로 표현하므로 특정 지역에서 발생하는 국지적 특이값을 충분히 반영하지 못하는 한계가 있다. 반면, 격자점 지도는 관측치에 기반해 국지적 변화를 보다 정밀하게 반영할 수 있어, 함수모델의 보완적 역할을 수행한다. 따라서 함수모델에서 추정된 전리층 지연값을 보간하여 전리층 격자점 지도 (grid map)를 생성하였다. 한편, 지역 전리층 분포 모델은 수직 전리층 지연값 (vertical ionospheric delay)을 나타내는 모델이므로 입력데이터인 경사 전리층 지연값 (slant ionospheric delay)을 경사함수를 통해 변환한 뒤 사용하였다.
의사거리로 계산한 전리층 지연값에는 항법위성의 L1/L2 DCB와 수신기의 DCB가 포함되어 있으므로 전리층분포 함수모델과 동시에 추정을 해야 하는데, 위성 DCB와 수신기 DCB 개별값이 아닌 합의 형태로만 추정 가능하다. 이를 분리하기 위해서 모든 항법위성 DCB의 합은 0이라는 가정을 사용한다 (Han 2004). 이를 이용하여 수신기별 DCB를 먼저 계산한 후 각 DCB 합에서 수신기 DCB를 빼는 방법으로 위성 DCB를 계산한다. DCB는 1일 단위로 추정하는데, 이는 입력값으로 변경 가능하다.
보정정보로 생성하는 전리층 지연값은 전리층분포 함수모델을 사용하지 않고, 관측된 전리층 지연값을 IPP 위치 및 시간별로 정리한 뒤 인근 격자점에 적용하는 방식으로 진행된다. 전단계에서 추정한 위성 DCB와 수신기 DCB는 전리층 지연값을 보정하는데 사용된다. 격자점에서의 전리층 지연값은 동일한 시각에 해당 격자점 100 km 정도의 일정 반경 내에 위치하는 모든 IPP에서 관측된 전리층 지연값을 거리에 따라 가중 평균하여 산출한다. 가중치는 IPP와 격자점 간의 거리에 반비례하도록 설정하였다. 격자점의 간격은 위도 5° 및 경도 5°로 설정하였는데, 사용자 입력에 따라 조정 가능하다. 전리층 지연값의 생성주기 역시 입력값으로 조정 가능한데, 긴 생성주기를 적용하여 message time-out에 의한 효과도 파악할 수 있다.
일본 내 1개 지점을 수신기 위치로 설정한 후 GPS와 QZSS 위성에서 수신한 신호를 시뮬레이션하였다. 일본 중북부에 위치한 IGS MIZU 지상국을 선정하였는데, 이는 IGS 지상국으로 수신기 시계오프셋 추정값이나 수신기 DCB 추정값 등을 획득하기 용이하여 신호 검증에 유리하기 때문이다. 가상 지점을 설정할 경우 시뮬레이션 절차는 동일하지만, 비교할 실제 관측값이 없어서 검증을 수행할 수 없다.
2024년 8월 7일의 GPS 궤도와 전리층 정보를 사용하였는데, 이는 2024년 중 해당 기간의 태양활동지수 F10.7이 293 SFU 정도로 가장 높은 값을 나타내었기 때문에 전리층 지연값이 극대화되고, 전리층 지연값 보정에 의한 성능 향상 효과를 파악하기 유리하기 때문이다. QZSS 궤도는 시뮬레이션 궤도를 사용하였으므로, 시뮬레이션 날짜와는 관계가 없다.
Fig. 4는 시뮬레이터로 생성한 2024년 8월 7일 GPS와 QZSS 위성의 의사거리를 나타내고 있다. 높은 궤도로 인하여 QZSS 의사거리가 훨씬 큰 값을 가지는 것을 알 수 있다. 호주 상공까지 비행하는 QZS-2 IGSO 위성의 경우 의사거리가 37,109 km에서 38,884 km까지 변화한다.
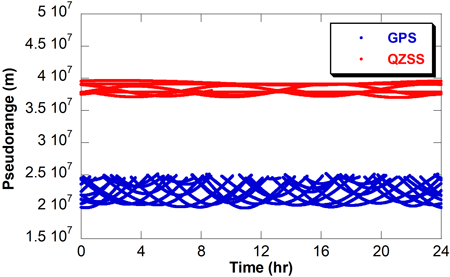
Fig. 4. Simulated pseudoranges of GPS and QZSS satellites on August 7, 2024.
Fig. 5는 2024년 8월 7일 MIZU 지상국에서 생성된 QZS-2 위성의 의사거리에 가해진 각종 오차 성분을 나타내고 있다. 수신기 노이즈는 표시에서 제외하였으며, 표준편차가 30 cm인 Gaussian 노이즈로 설정하였다. 시뮬레이션에서 설정한 위성 시계오프셋은 100 km 정도로, 다른 오차와 많은 차이가 나므로 그래프에 같이 표시하지 않았다. QZSS IGSO 위성의 경우 호주 남부 지역 상공을 지나갈 때 가시성이 확보되지 않으므로 하루에 20시간가량 관측된다.
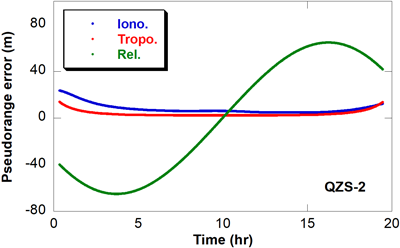
Fig. 5. Pseudorange error components of the QZS-2 on August 7, 2024.
생성된 의사거리 데이터의 정확도는 실제 지상국 관측데이터와의 직접 비교를 통해 평가하였다. MIZU 지상국에서 하루 동안 가시위성에 대해 시뮬레이션과 실제 의사거리의 차이를 비교한 결과, GPS 위성의 경우 평균 오차 –0.8 m, 표준편차 1.3 m, RMS 1.5 m로 실제 관측데이터와 유사한 수준의 결과가 도출되었으며, 이 결과는 Fig. 6에 나타나 있다. 또한, Fig. 7에 나타낸 것과 같이 경사각과 방위각을 격자화하여 분석한 결과 경사각이 낮은 구간에서 의사거리 오차의 표준편차가 증가하는 특성을 확인할 수 있었으며, 이는 전리층 및 대류층 모델의 한계와 경사각에 따른 오차 특성을 반영한다.
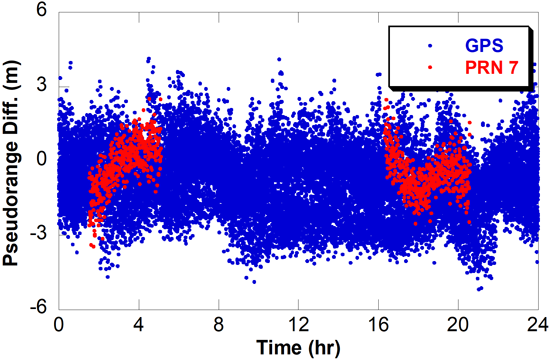
Fig. 6. Pseudorange simulation errors for GPS satellites on August 7, 2024.
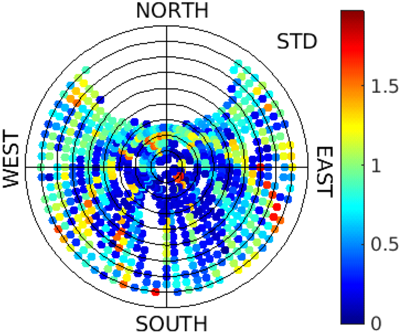
Fig. 7. Skyplot of pseudorange error STD on August 7, 2024.
GPS 및 QZSS 위성의 궤도 및 시계오차 보정정보 생성을 위해, 궤도결정에 사용되는 Fig. 8에 나타난 것과 같이 전 세계 26개 지상국의 위치에서 시뮬레이션 기반 관측데이터를 생성하였다. 각 지상국은 GPS 및 QZSS 위성의 지상궤적 및 가시성을 고려하여 분포되었으며, 일정 수준의 노이즈를 가한 의사거리를 사용하였다. 이는 실제 의사거리 사용 시 전리층 및 대류층 지연 오차 등의 의사거리 오차요소가 제거되고 남은 오차를 상정한 것이다.
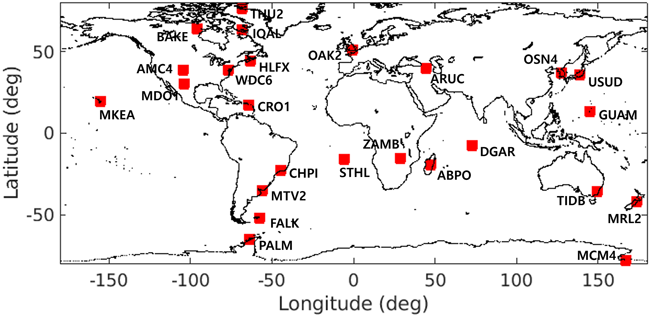
Fig. 8. Location of ground stations for orbit determination.
위성의 궤도 및 시계 보정정보는 X, Y, Z 세 방향의 궤도 보정값과 시계오프셋 보정값으로 구성되며, 30초 간격으로 생성된다. 하루 동안 GPS PRN 07의 궤도 및 시계오차 보정값의 평균은 각각 0.9 m, 0.5 m로 나타났으며, 이는 항법메시지의 궤도 및 시계오차와 궤도결정을 통해 추정된 궤도 및 시계오차 사이의 차이에 해당한다. Fig. 9는 2024년 8월 7일, GPS Pseudo-Random Noise (PRN) 07의 궤도 및 시계 보정정보를 보여준다.
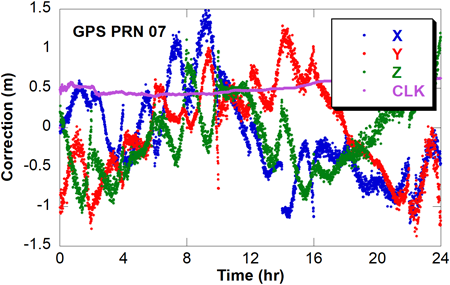
Fig. 9. Orbit and clock corrections for GPS PRN 07 on August 7, 2024.
보정정보의 검증은 실제 MSAS의 궤도 및 시계 보정정보를 적용했을 때의 Pseudorange Error (PRE) 수준 비교를 통해 진행하였다. PRE는 위성 궤도 및 시계오차를 의사거리 방향으로 투영하여 사용자와 위성 사이의 거리오차로 나타낸 것을 의미한다. PRE는 궤도오차를 가시선 (Line of Sight, LOS) 방향으로 투영하고, 시계오차의 오차를 더하여 Eq. (3)과 같이 계산된다.
$$PRE
=
\frac{
\varepsilon _{r_{sat}}
\left( r_{sat} – r^{rcv} \right)
}{
\left|\, r_{sat} – r^{rcv} \,\right|
}
\;+\;
\varepsilon_{\Delta t_{sat}}$$
여기서 $r_{sat}$과 $r^{rcv}$는 각각 위성과 수신기의 실제 위치를 나타내고, $\varepsilon_{r_{sat}}$과 $\varepsilon_{\Delta t_{sat}}$은 위성의 궤도 및 시계오프셋의 오차를 의미한다 (Park & Suk 2014).
2007년 10월 27일 MSAS 보정 후 전체 GPS 위성 PRE의 RMS는 0.26 m로 나타난 바 있다 (Jeong & Kim 2009). 이를 검증하기 위해 2024년 8월 7일을 기준으로, 3 cm 수준의 노이즈를 적용하여 산출한 GPS 위성의 궤도결정 PRE의 RMS는 0.34 m로, 기존 연구 결과와 유사한 수준임을 확인하였다. Fig. 10은 궤도결정을 통해 얻은 GPS 위성별 PRE의 RMS를 나타낸다.
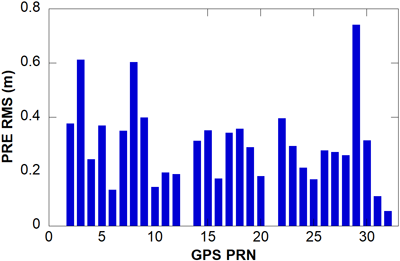
Fig. 10. PRE RMS of GPS satellites estimated by orbit determination on August 7, 2024.
전리층 보정정보 생성 시 일본 내륙에 위치한 13개 IGS 지상국에서 생성한 GPS 위성의 이중주파수 관측데이터를 사용하였으며, 각 지상국의 위치는 Fig. 11에 도시하였다. 전리층 지도 생성 범위는 위도 0°~70°, 경도 100°~170°로 설정하였으며, 이는 일본 지역에서의 IPP 분포를 충분히 포함한다. 전리층 보정정보의 생성 간격은 5분으로 설정하였다.
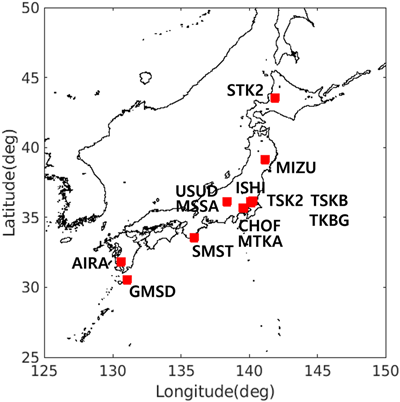
Fig. 11. Locations of ground stations used for ionospheric delay estimation.
특정 시점에 전리층 보정정보의 공간 분포를 분석한 결과, 저위도 지역으로 갈수록 전리층 보정값이 현저히 증가하는 양상이 확인되었다. 이러한 경향은 낮 시간대에 위도가 낮을수록 전리층 지연 오차가 커지는 특성과 일치한다. Fig. 12는 2024년 8월 7일 4시 (LT 13시)의 전리층 보정정보를 보여주는데, 공간적 범위가 일본 인근 지역으로 한정된 것을 볼 수 있다. 이것은 전리층 보정정보 생성 시 일본 지상국 내 IPP에서 산출된 전리층 지연 추정값만을 사용했기 때문이다.
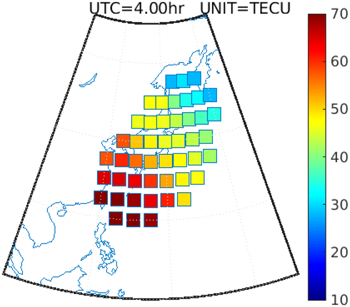
Fig. 12. Ionospheric delay correction on August 7, 2024.
전리층 보정정보 검증을 위해 MSAS 전리층 보정정보와의 비교를 수행하였다. Lee & Park (2025)은 2024년 3월 20일, [40°, 130°]를 포함한 여러 지점에서 IGS GIM과 MSAS를 비롯한 SBAS 전리층 보정정보를 비교하였으며, 그 결과 MSAS의 전리층 보정정보는 IGS GIM 대비 약 2 m 이하의 차이를 나타냈다. 본 연구에서는 일본에서 가장 가까운 [40°, 130°] 지점을 대상으로 동일한 수준의 전리층 보정정보를 확보하기 위해 이중주파수 관측값 생성 시 45 cm의 노이즈를 적용하였다. Fig. 13은 2024년 3월 20일의 IGS GIM과 전리층 보정정보를 나타내며, IGS GIM과의 전체적인 차이 수준은 실제 MSAS와 유사하였다.
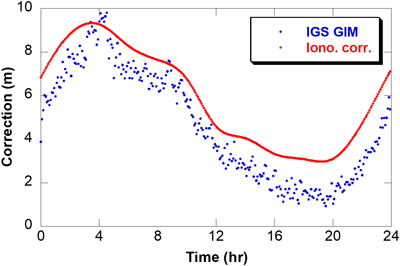
Fig. 13. Ionospheric delay correction on March 20, 2024.
2024년 8월 4일부터 10일까지 코드의사거리 생성 및 위치추정에 사용된 전리층 보정정보를 비교하였다. QZS-2의 경우 IGS GIM과 시뮬레이션 보정정보의 차이가 저경사각에서 최대 4.3 m까지 증가했으며, RMS는 0.7 m였다. 전체 GPS 및 QZSS 위성에 대한 차이의 RMS는 2.5 m로 나타났고, 저경사각 관측 비중이 상대적으로 큰 GPS 위성에서 차이가 더 크게 분포하였다. Fig. 14는 QZS-2에 적용된 전리층 지연 보정값의 시간 변화를 나타낸다.
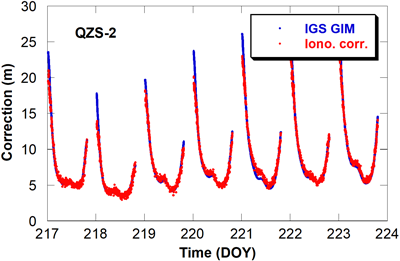
Fig. 14. Ionospheric delay applied to QZS-2 from IGS GIM and simulated corrections from August 4 to August 10 in 2024.
2024년 8월 4일 (DOY 217)부터 8월 10일 (DOY 223)까지 일주일간, 일본 MIZU 지상국의 위치에서 시뮬레이션을 수행하였다. 보정정보 적용 여부에 따른 위치정확도를 평가하였으며, GPS와 QZSS 위성을 각각 단독으로 사용하는 경우와 두 시스템을 통합 운용하는 경우를 모두 고려하여 분석을 진행하였다.
Fig. 15는 시스템 운용에 따른 일주일간의 수평위치오차 RMS를 나타낸다. GPS 단독 운용 시엔 보정정보 적용하지 않았을 때 수평위치오차가 1.8 m였고, 보정정보를 적용했을 때 1.2 m까지 감소하였다. QZSS만 사용할 경우 4.1 m에서 1.6 m로 감소하여 가장 큰 개선 폭을 보였으며, GPS와 QZSS를 통합 운용 시 1.9 m에서 1.0 m로 감소하여 GPS 단독 운용 대비 높은 성능을 확보하였다. GPS는 낮은 경사각으로 인해 전리층 보정정보의 효과가 컸고, QZSS는 궤도 및 시계 보정정보의 효과가 큰 것을 확인하였다.
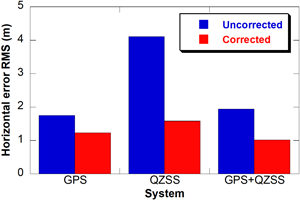
Fig. 15. Horizontal positioning errors for different systems and application of corrections from August 4 to August 10 in 2024.
Fig. 16은 시스템 운용에 따른 일주일간의 수직위치오차 RMS를 나타낸다. GPS 단독 운용을 고려한 경우 보정정보 미적용 시 수직위치오차가 3.8 m였고, 보정정보를 적용했을 때 1.4 m로 감소하였다. QZSS만 사용할 경우 4.7 m에서 1.5 m로 줄어들었으며, GPS와 QZSS를 통합 운용할 경우 3.6 m에서 1.1 m로 감소하여 가장 낮은 수직위치오차를 보였다. GPS는 낮은 경사각 관측 비율이 높아 전리층 보정정보의 효과가 지배적이었으며, QZSS는 궤도 및 시계 보정정보만으로도 개선이 있었지만 전리층 보정정보를 함께 적용했을 때 추가적인 향상이 나타났다.
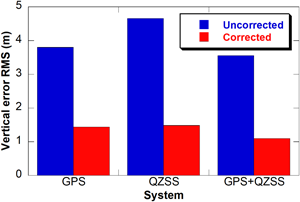
Fig. 16. Vertical positioning errors for different systems and application of corrections from August 4 to August 10 in 2024.
일본 내 지상사용자의 보정정보 효과를 정량적으로 분석하기 위하여, 위도 30°~40°, 경도 130°~140° 의 범위 내에 2° 간격으로 총 36개의 격자점을 설정하고, 해당 위치에 가상 지상국을 구성하였다. 이러한 구성은 일본 본토 전역을 고르게 포함하는 공간적 분포를 고려한 것이며, 지역적 정확도 차이를 체계적으로 분석하기 위한 기반이 된다.
Fig. 17은 2024년 8월 7일 하루 동안 GPS와 QZSS를 동시에 운용할 때 보정정보 적용 여부에 따른 수평위치오차 RMS 분포를 비교한 결과이다. 보정정보를 적용하지 않은 경우, 저위도 지역에서 전리층 지연의 영향으로 오차가 최대 3.6 m까지 크게 증가하였다. 반면, 보정정보를 적용하면 전 지역에서 오차가 크게 줄어 저위도 지역의 최대 오차가 1.8 m, 전 지역 평균이 1.2 m로 감소하였다. 이는 전리층 보정이 공간적 편차를 완화하고, 일본 전역에서 안정적인 수평 위치정확도를 확보하는 데 기여함을 보여준다. 다만, 일반적인 SBAS 서비스 영역 감시 결과에서는 보정정보 생성 지점과 사용자의 시공간 이격에 따라 비상관 오차가 증가하는 경향이 나타나지만, Fig. 17b에서는 이러한 특성이 두드러지지 않았다. 이는 본 연구에서 전리층 보정정보 생성을 위해 일본 내 13개 IGS 지상국을 사용하였기 때문에, 사용자와 보정정보 생성 지점 간 공간적 이격이 상대적으로 작아 SBAS 사용 시 관측되는 일반적인 비상관 오차 증가 경향이 나타나지 않은 것으로 해석된다.
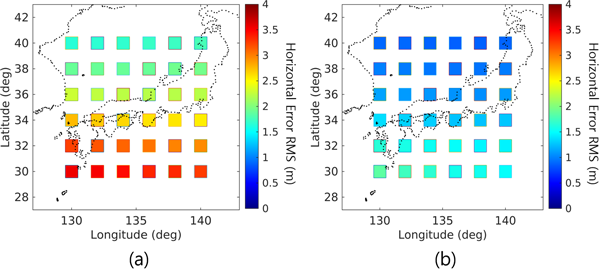
Fig. 17. Horizontal positioning error RMS in Japan by correction application on August 7, 2024 (a) without correction, (b) with correction.
본 연구에서는 GPS와 QZSS 통합 운용 환경에서 실제 관측데이터 수준의 GNSS 의사거리와 MSAS 수준의 궤도 및 전리층 보정정보를 생성할 수 있는 시뮬레이터를 개발하였다. 시뮬레이터는 IGS 정밀궤도력, IGS 전리층 지도 등 가용한 실제 데이터를 사용하여 실제 환경과 유사한 조건을 구현하였으며, 이를 통해 다양한 운용 시나리오에서 보정정보의 효과를 분석할 수 있도록 설계하였다. 보정정보 생성 방식은 기존 SBAS와 달리 궤도 및 시계는 전지구 지상국을 기반으로, 전리층은 일본 지역 지상국을 기반으로 산출하여 일본 내륙 성능 분석에 적합하며 노이즈 수준 조정을 통해 성능을 맞출 수 있다. 따라서 개발된 시뮬레이터는 의사거리, 궤도 및 시계 보정정보, 전리층 보정정보의 정확도를 각각 실제 데이터 또는 기존 서비스 수준과 비교하여 검증하였다. 이를 활용한 분석 결과, 보정정보 적용 시 GPS와 QZSS 각각의 특성에 따라 위치정확도가 개선되는 경향이 확인되었으며, 두 시스템을 통합 운용할 경우 전반적인 위치정확도가 향상되는 효과가 나타났다. 또한 일본 전역을 대상으로 한 다중 지상국 시뮬레이션을 통해 지역별 보정정보의 기여도를 평가하고, 서비스 영역 전반에서의 수평 위치정확도 성능 변화를 확인하였다. 본 연구는 RNSS 운용 시 SBAS 보정정보의 성능 분석을 위한 시뮬레이션 기반 검증체계를 제시하였으며, 향후 지역위성항법 보강시스템의 설계와 성능평가 연구에 활용될 수 있다.
본 연구는 국토교통부/국토교통과학기술진흥원의 지원으로 수행되었음 (과제번호 RS-2022-00207459).
Conceptualization, J.K.; formal analysis, Y.K. and J.K.; data curation, Y.K.; writing—original draft preparation, Y.K.; writing—review and editing, J.K.; project administration, J.K., H.K.; funding acquisition, H.K.
The authors declare no conflict of interest.
Ahn, J. 2023, KPS & KASS Status Update, United Nations/Finland Workshop on the Applications of Global Navigation Satellite Systems, Helsinki, Finland, 23-26 October 2023.
EGNOS User Support, EGNOS SYSTEM [Internet], cited 2025 July 25, available from: https://egnos-user-support.essp-sas.eu/egnos-system
FAA, Global SBAS Status [Internet], cited 2025 July 25, available from: https://www.faa.gov/ato/navigation-programs/global-sbas-status
Han, J. 2004, A Study on Ionospheric Corrections for Accuracy Improvement of Stand-alone GPS, Master’s Thesis, Inha University.
Hwang, N. E., Lee, J. H., & Kim, I. K. 2021, Examination of Availability on QZSS SLAS in Korea, Institute of Control, Robotics and Systems, 27, 168-175. https://doi.org/10.5302/J.ICROS.2021.20.0163
Jeong, M. S. & Kim, J. 2008, Analysis of MSAS Ionosphere Correction Messages and the Effect of Equatorial Anomaly, Journal of the Korean Society for Aviation and Aeronautics, 16, 12-20.
Jeong, M. S. & Kim, J. 2009, Analysis of MSAS Correction Information and Performance in Korea, Journal of the Korean Society for Aeronautical & Space Sciences, 37, 372-382. https://doi.org/10.5139/JKSAS.2009.37.4.372
Kenji, N. 2023, QZSS System and Service Updates, in 2023 ICG Annual Meeting, Madrid, Spain, 15-20 Oct 2023. https://www.unoosa.org/documents/pdf/icg/2023/ICG-17/icg17.01.06.pdf
Kim, B., Kim, J., Bu, S., & Lee, C. 2022, Performance Analysis of GPS and QZSS Orbit Determination using Pseudo Ranges and Precise Dynamic Model, Journal of Advanced Navigation Technology, 26, 404-411. https://doi.org/10.12673/jant.2022.26.6.404
Kim, I. K., Lee, J. H., Choi, Y. S., & Seo, H. S. 2024a, Comparative Analysis of Correction Information Between KASS and MSAS Services, In Proceedings of the 2024 IPNT Conference, Jeju, Korea, 6-8 Nov 2024. https://ipnt.or.kr/2024proc/85
Kim, J., Kim, Y., & Kim, J. 2024b, Technology Trends of Satellite Based Augmentation Systems, Journal of Positioning, Navigation, and Timing, 13, 25-34. https://doi.org/10.11003/JPNT.2024.13.1.25
Lee, H. S. & Park, K. D. 2025, Performance Analysis of GIM and SBAS Ionosphere Modeling for GPS Positioning in the Korean Peninsula, Journal of Positioning, Navigation, and Timing, 14, 91-99. https://doi.org/10.11003/JPNT.2025.14.1.91
Lim, C. S. & Park, B. W. 2017, Comparative Analysis of Performance for DGPS and SBAS in Korea Region, Journal of Advanced Navigation Technology, 21, 279-286. https://doi.org/10.12673/jant.2017.21.3.279
NEC, MSAS: Michibiki-Satellite-based Augmentation System [Internet], cited 2025 July 25, available from: https://www.nec.com/en/global/solutions/cns-atm/navigation/msas.html
Park, J. P. & Suk, J. 2014, A Study on Navigation Performance Analysis Technique of Pseudolite Navigation Systems, Journal of the Korean Society for Aeronautical & Space Sciences, 42, 947-957. https://doi.org/10.5139/JKSAS.2014.42.11.947
Saito, S. 2019, GBAS/SBAS Implementation Perspective – Japan, in GBAS/SBAS International Workshop, Seoul, Korea, 3-5 June 2019.
Sakai, T. 2018, The IGSO SBAS: DFMC Seamless and Robust Navigation, in 2018 ICG Annual Meeting, Xi’an, China, 5-9 Nov 2018. https://www.unoosa.org/documents/pdf/icg/2018/icg13/wgb/wgb_23.pdf
SBAS IWG 2021, Global SBAS Status, Satellite Based Augmentation System, SBAS Interoperability Working Group