Hun-Yeop Choi1![]() , Kwan-Dong Park1,2†
, Kwan-Dong Park1,2†![]()
1Department of Geoinformatic Engineering, Inha University, Incheon 22212, South Korea
2PPSOL Inc, Seoul 08504, South Korea
†Corresponding Author: Kwan-Dong Park, E-mail: kdpark@inha.ac.kr
Citation: Choi, H.-Y. & Park, K.-D. 2026, Experimental Evaluation of GNSS Doppler-based Positioning and Proposal of a Pseudorange-Doppler Integrated Model, Journal of Positioning, Navigation, and Timing, 15, 1-12.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2026 March, Volume 15, Issue 1, pages 1-12. https://doi.org/10.11003/JPNT.2026.15.1.1
Received on Nov 20, 2025, Revised on Dec 05, 2025, Accepted on Dec 11, 2025, Published on Mar 15, 2026.
Copyright © The Institute of Positioning, Navigation, and Timing
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Doppler observations contain information that reflects the line-of-sight relative velocity between a satellite and a receiver. Owing to this characteristic, they exhibit stable behavior even over short time intervals and are advantageous for precisely estimating velocity. Recently, there has been increasing interest in position and velocity estimation techniques that utilize the large Doppler shifts provided by Low Earth Orbit (LEO) satellites. The feasibility of using Doppler measurements from LEO satellites, however, has mainly been investigated through simulation studies while few experimental evaluations under real-world conditions have been reported. In this study, Doppler observations from GPS, Galileo, and BeiDou satellites were collected using a commercial Global Navigation Satellite System (GNSS) receiver. The accuracy of Doppler-based positioning was assessed using least-squares estimation in both static and kinematic conditions. For the static scenario, observation data from the GAMG reference station were used. The resulting 3D Root Mean Square Error (RMSE) ranged from approximately 50 to 100 m, depending on the number of visible satellites and the observation conditions. For the kinematic scenario, experiments were conducted in an urban area and Real-Time Kinematic (RTK) solutions were used as the ground truth. The results show that the 3D RMSE of Doppler-only positioning increased to approximately 70 to 400 m due to signal blockage and multipath effects commonly present in urban environments. In contrast, velocity estimation maintained a stable 3D RMSE of approximately 0.1 m/s, thus demonstrating far greater robustness and consistency compared to position estimation. Based on the reliable velocity estimates obtainable from Doppler observations, an Extended Kalman Filter (EKF) model integrating Doppler and pseudorange observations was developed and experimentally evaluated in kinematic conditions. The proposed integrated model reduced the 3D RMSE by approximately 99% compared to Doppler-only positioning and by about 58% compared to pseudorange-only positioning. These findings experimentally demonstrate Doppler-based GNSS techniques can enhance positioning performance.
GNSS, Doppler shift, positioning
Global Navigation Satellite System (GNSS)은 위치, 항법, 시각 정보를 제공하는 핵심 기술로, 다양한 산업 및 응용 분야에서 널리 활용되고 있다. GNSS로부터 수신 가능한 대표적인 관측치에는 코드의사거리, 반송파 위상, 도플러 주파수 편이 등이 있으며, 각 관측치는 서로 다른 특성으로 인해 다양한 활용 분야를 가진다. 코드의사거리는 GNSS 위성 안테나와 수신기 안테나의 위상중심 사이의 거리를 나타내며, 이를 기반으로 한 측위 기술은 자동차 내비게이션과 스마트폰 등 일반 사용자들에게 널리 사용되고 있다. 그러나 코드의사거리 관측치는 수 미터 수준의 측위 정확도에 그치는 한계가 있어 (Hofmann-Wellenhof et al. 2008) 센티미터 수준의 정확도를 달성하기 위해서는 반송파 위상 기반 측위 기술이 필수적이다 (Liu et al. 2020). 반송파 위상을 이용한 정밀 측위 기법에는 상대 측위 기반의 Real Time Kinematic (RTK)와 단독 측위 기반의 Precise Point Positioning (PPP) 그리고 PPP-RTK가 있다 (EUSPA 2019). 다만, 반송파 위상 기반 측위 기술은 파장의 정수배에 해당하는 모호정수를 정확히 추정해야 하는 어려움이 있으며, 신호 단절이나 다중경로 오차 등으로 인해 발생하는 사이클 슬립(cycle slip)을 검출하고 보정해야 하는 한계가 존재한다. 또 다른 관측치인 도플러 주파수 편이는 위성과 수신기 간의 상대속도에 의해 발생하는 주파수 변화량을 기반으로 하며, 짧은 시간 간격에서도 안정적인 성능을 유지하고 모호정수 문제가 존재하지 않다는 장점이 있다. 따라서 도플러 관측치를 활용한 좌표 및 속도 결정 연구는 코드의사거리와 반송파 위상 관측치의 한계를 보완하고, 실시간성을 요구하는 상황이나 난수신 환경에서도 안정적인 측위 성능을 확보할 수 있다는 점에서 중요한 의의가 있다.
도플러 관측치를 활용한 수신기 좌표 추정 기법은 Park (1999)에서 정지 상태 수신기를 대상으로 도플러 관측치만을 이용한 절대 좌표 추정 실험이 수행되었다. 해당 연구에서는 수신기 좌표 및 속도의 동시 추정과 정지 측위 모델을 제시하고, 실험적으로 GPS 위성의 코드의사거리 기반 결과와 비교를 통해 도플러 관측치 기반 측위의 가능성을 실험적으로 검증하였다. 그러나, 해당 연구는 측위 결과 및 오차의 정량적 분석이 주된 목적은 아니었기 때문에, 다양한 조건에서의 성능 분석은 충분히 이루어지지 않았다.
이후 2000년 5월 1일 미국 정부가 GPS의 Selective Availability 기능을 해제함으로써, 코드의사거리 기반 절대 측위의 정확도가 수 미터 수준으로 향상되었다. 이에 따라 도플러 관측치를 단독으로 사용하는 필요성이 상대적으로 감소하여 도플러 기반 단독 측위 연구는 한동안 제한적으로 수행되었다. 이로 인해 도플러 관측치는 보조 관측치로 활용되는 연구가 활발히 이루어졌다. 도플러 관측치의 활용 분야는 수신기 속도 추정 (Zhang et al. 2004), GNSS 원격탐사 (Clarizia et al. 2009), 평활화 필터 (Zhou & Li 2017), 반송파 위상 사이클 슬립 탐지 (Liu et al. 2024) 등이 있다.
최근에는 Low Earth Orbit (LEO) 위성이 빠른 궤도 속도로 인해 큰 도플러 편이를 제공한다는 점에 주목하여, 도플러 기반 좌표 추정 연구가 활발히 진행되고 있다. Li et al. (2011), Psiaki (2021), Allahvirdi-Zadeh et al. (2025)은 LEO 위성의 도플러 관측치를 활용한 좌표 추정 가능성을 평가하였고, 측위 민감도가 향상할 수 있음을 보였다. 또한 GNSS 위성과 LEO 위성의 결합을 통해 기존 GNSS 위성의 측위보다 높은 정확도와 신뢰도를 확보할 수 있음을 실험적으로 제시하였다. 그러나 LEO 위성을 활용한 선행 연구들은 대부분 수치 시뮬레이션에 의존하였다. 실제 GNSS 수신기로부터 수집한 도플러 관측치를 활용한 정량적 분석은 제한적으로 수행되었으며, 특히 도심 환경이나 난수신 환경에서의 활용 가능성은 충분히 검증되지 못하였다.
본 연구는 기존 GNSS 도플러 관측치 기반 좌표 추정의 체계적 검증이 부족하여, LEO 위성의 도플러 관측치 기반 좌표 추정 연구 결과를 비교・분석할 수 있는 실측 기준이 부재하다는 한계를 보완하고자 수행되었다. 이에 따라 본 연구에서는 실제 GNSS 수신기로부터 수집한 도플러 관측치를 활용하여, 정지 및 이동 환경, 관측 신호 조합, 가중치 적용 여부 등 다양한 조건에서 수신기의 좌표 및 속도 추정 성능을 분석하였다. 분석에는 GPS, Galileo, BeiDou 위성 신호를 사용하였으며, 이를 통해 도플러 단독 측위의 적용 가능성과 한계를 파악하고자 최소제곱법을 기반으로 도플러 단독 기법의 성능을 평가하였다. 또한 도플러의 한계를 보완하기 위해, 본 연구는 이동 환경에서 도플러와 코드의사거리 관측치의 결합 모델을 제안하였다. 제안된 결합 모델은 도플러 관측치가 제공하는 안정적인 속도 정보를 좌표 추정에 반영하기 위해 Extended Kalman Filter (EKF)을 기반으로 구현되었다.
본 논문의 구성은 다음과 같다. 2장에서는 도플러 기반 좌표 및 속도 추정 알고리즘을 소개하였다. 3장에서는 도플러 단독 측위 실험 결과를 정리하고, 4장에서는 도플러와 코드 관측치를 결합한 측위 모델의 결과를 분석하였다. 마지막으로 5장에서는 본 연구의 결론을 정리하였다.
이번 장에서는 GNSS 도플러 관측치를 활용한 좌표 및 속도 추정 모델의 구성 절차를 설명한다. 2.1절에서는 코드의사거리 관측 방정식을 시간 미분하여 도플러 관측 방정식을 유도하고, 2.2절에서는 최소제곱법을 기반으로 수신기의 좌표, 속도, 시계 드리프트를 추정하기 위한 모델을 제시한다.
GNSS 수신기에서의 코드의사거리 관측 모델은 Misra & Enge (2011)에 따라 Eq. (1)과 같이 정의된다. 본 연구에서는 이 관측식을 기반으로 도플러 기반 좌표 추정에 활용되는 관측 방정식을 도출하였으며, 그 유도 과정은 Park (1999)의 접근 방식을 참고하였다.
$$p = \rho + c(\delta t_r – \delta t^s) + I + T + b_r + b^s + M + \epsilon$$
여기서 $c$는 빛의 속도를 의미하며, $\rho$는 수신기와 위성 간의 계산된 기하학적 거리이다. 수신기 시계오차는 $\delta t_r$, 위성 시계오차는 $\delta t^s$로 각각 정의된다. 또한, 이온층 오차 $I$, 대류권 오차 $T$, 수신기 하드웨어 오차 $b_r$, 위성 하드웨어 오차 $b^s$, 다중경로 오차 $M$, 랜덤 오차 $\epsilon$이 포함된다. 본 연구에서는 수신기 시계 및 위성 시계 오차를 제외한 나머지 오차 항들은 실험 설계상 직접적으로 반영되지 않으므로, 이온층 오차와 대류권 오차를 포함한 나머지 오차들을 하나의 잔여 오차항 $\xi$으로 단순화하여 Eq. (2)와 같이 표현하였다.
$$p = \rho + c(\delta t_r – \delta t^s) + \xi$$
Eq. (2)를 바탕으로 도플러 관측 방정식은 Park (1999)이 제시한 방식에 따라 시간 미분을 통해 Eq. (3)과 같이 정리할 수 있다.
$$\dot{p} = -\lambda \cdot f_{d} = l_{sr}^{T}(V^{s} – V_{r}) + c(\dot{\delta{t}_{r}} – \dot{\delta{t}^{s}}) + \dot{\xi}$$
여기서, $\lambda$는 위성 신호의 파장을, $f_{d}$는 위성 신호의 주파수 변화량 관측치를 의미하며 $V^{s}$와 $V_{r}$는 각각 위성과 수신기의 속도 벡터이다. $l_{sr}^{T}$의 윗첨자 $T$는 전치를 의미하며, $l_{sr}$ 수신기에서 위성을 향하는 단위 시선 벡터를 나타낸다. $\dot{\delta{t}_{r}}$ 는 수신기 시계와 GPS Time (GPST) 간 시간 오프셋의 변화율, 즉 수신기 시계 드리프트를 의미하며, $\dot{\delta{t}^{s}}$는 위성 시계와 GPST 간 시간 오프셋의 변화율인 위성 시계 드리프트를 나타낸다. 또한, $\dot{\xi}$는 잔여 오차($\xi$)의 시간 변화율로 정의된다.
이 연구에서는 사용된 도플러 관측치 기반 측위 모델에서는 항법 신호를 통해 위성의 좌표, 속도, 그리고 위성 시계 드리프트를 알 수 있으므로, 수신기의 좌표 벡터 $P_r$, 수신기의 속도 벡터 $V_r$ 그리고 수신기 시계 드리프트 $\dot{\delta{t}_{r}}$가 주요 미지수에 해당한다. 이들을 포함한 상태 벡터 $X$는 Eq. (4)와 같이 나타낼 수 있다.
$$X = [P_{r}^{T} \quad V_{r}^{T} \quad \delta \dot{t}_{r}]^{T} = [x_{r} \quad y_{r} \quad z_{r} \quad \dot{x}_{r} \quad \dot{y}_{r} \quad \dot{z}_{r} \quad \delta \dot{t}_{r}]^{T}$$
여기서 $x_r$, $y_r$, $z_r$은 수신기 좌표 벡터의 각 요소를 나타내며 $\dot{x}_{r}$, $\dot{y}_{r}$, $\dot{z}_{r}$은 수신기 속도 벡터의 각 요소를 나타낸다. 상태 벡터 $X$는 최소제곱법을 사용하여 나타내면 Eq. (5)와 같다.
$$X = (H^{T}WH)^{-1}H^{T}Wy$$
여기서 $H$는 상태 벡터 $X$의 각 요소에 대하여 도플러 관측 방정식을 편미분함으로써 구성된 시스템 행렬이며, Eq. (6)과 같이 표현된다.
$$H^{i} = [\frac{\partial \dot{p}}{\partial x_{r}} \quad \frac{\partial \dot{p}}{\partial y_{r}} \quad \frac{\partial \dot{p}}{\partial z_{r}} \quad \frac{\partial \dot{p}}{\partial \dot{x}_{r}} \quad \frac{\partial \dot{p}}{\partial \dot{y}_{r}} \quad \frac{\partial \dot{p}}{\partial \dot{z}_{r}} \quad \frac{\partial \dot{p}}{\partial \delta \dot{t}_{r}}]$$
여기서 $H^i$는 $i$번째 위성에 대한 시스템 행렬을 의미하며, 전체 행렬 $H$행의 수는 좌표 추정에 사용되는 위성의 개수에 해당한다. $H$ 행렬의 1~3열은 수신기 좌표를 계산하는 부분이며 4~6열은 수신기의 속도를 계산하는 부분이다. 마지막 7열은 수신기 시계 드리프트를 나타낸다. 또한, Tay & Marais (2013)에 따르면, $W$는 관측값의 신뢰도를 반영하는 가중치 행렬로, 위성의 반송파 대 잡음비($C/N_0$) 및 고도각($e$)을 고려하여 설정할 수 있다. 본 연구에서는 이러한 특성을 바탕으로 $C/N_0$과 고도각에 비례하는 방식으로 $W$를 Eqs. (7–9)와 같이 구성하였다.
$$W = W_{e} \circ W_{C/N_{0}}$$
$$W_{e}^{i} = \begin{cases} 1(e > 30^{\circ}) \\ \sin(e) \times 1.8(e \le 30^{\circ}) \end{cases}$$
$$W_{C/N_{0}}^{i} = \begin{cases} 0(C/N_{0} < 30 \text{ dB-Hz}) \\ (\frac{C/N_{0}}{50})^{2}(C/N_{0} \ge 30 \text{ dB-Hz}) \end{cases}$$
Eq. (7)에서 사용된 $∘$ 기호는 Hadamard product로 원소별 곱을 의미한다. 따라서 $W$는 고도각 기반 가중치 Eq. (8)과 $C/N_0$ 기반 가중치 Eq. (9)를 각각 동일한 차원의 행렬로 정의한 후, 각 원소 단위에서 곱하여 계산된다. 여기서 위첨자 $i$는 Eq. (6)과 동일하게 $i$번째 위성을 의미하며, $W_e^i$와 $W_{C/N_0}^i$는 각각 해당 위성의 고도각과 $C/N_0$에 기반하여 산정된다.
Eq. (6)의 시스템 행렬은 수신기의 좌표 및 속도를 동시에 추정하는 경우에 해당한다. 그러나 Park (1999)의 연구에 따르면, 수신기의 속도와 좌표를 동시에 안정적으로 추정하는 것이 사실상 어려운 것으로 확인되었다. 이에 따라 본 연구에서는 정지 상태를 가정하고, 수신기의 속도를 0 m/s로 고정하여 시스템 행렬을 단순화하였다. 이에 대응하는 미지수 백터는 Eq. (10)과 같이 정의되며, 단순화된 시스템 행렬은 Eq. (11)과 같이 구성된다. 정지 측위 실험에서는 단순화된 모델과 일반 모델을 각각 적용하여 성능을 비교하였으며, 수신기의 속도 변화가 존재하는 이동 환경에서는 수신기의 속도를 0 m/s로 고정할 수 없으므로 Eq. (6)에 해당하는 일반 모델을 사용하였다.
$$X = [P_{r}^{T} \quad \delta \dot{t}_{r}]^{T} = [x_{r} \quad y_{r} \quad z_{r} \quad \delta \dot{t}_{r}]^{T}$$
$$H^{i} = [\frac{\partial \dot{p}}{\partial x_{r}} \quad \frac{\partial \dot{p}}{\partial y_{r}} \quad \frac{\partial \dot{p}}{\partial z_{r}} \quad \frac{\partial \dot{p}}{\partial \delta \dot{t}_{r}}]$$
이번 장에서는 수행된 세 가지 실험의 결과를 바탕으로 도플러 기반 측위 기법의 성능을 평가한다. 3.1절에서는 정지 환경에서의 수신기 좌표 추정 성능을 다양한 조건에 따라 비교하며, 각 조건에서 따른 측위 오차의 Root Mean Square Error (RMSE)를 분석한다. 3.2절에서는 기존 방식과 개선 방식을 비교한다. 기존 방식은 최소제곱법 과정에서 수신기의 속도를 0 m/s로 고정하는 방법이며, 개선 방식은 먼저 수신기의 속도를 추정한 뒤 이를 수신기 속도에 대입하여 좌표를 추정한다. 두 방법의 RMSE를 통해 비교・분석함으로써, 속도 추정을 포함한 개선 방식이 좌표 정확도 향상에 기여함을 보인다. 3.3절에서는 이동 환경에서의 수신기 좌표 및 속도 추정 성능을 각각 RMSE를 기준으로 평가하여, 도심 환경에서의 도플러 기반 측위 가능성을 검토한다.
정지 환경은 2025년 7월 7일, 경상남도 거창군에 위치한 감악산 기준국(GAMG)에서 GPS L1, Galileo E1 및 BeiDou B2 주파수의 도플러 관측치를 30초 간격으로 24시간 동안 수집한 자료를 제공받아 분석하였다. 관측에 사용된 장비는 Leica AR25 안테나와 Septentrio PolaRx5TR 수신기로 구성되어 있으며, 안테나 주변 환경은 Fig. 1과 같다. 실험은 가중치 적용 여부, 관측 신호 조합 방식, 그리고 좌표 및 속도 동시 추정 여부에 따른 성능 차이를 중심으로 수행되었으며, 이를 통해 정지 환경에서의 추정 정확도를 정량적으로 분석하였다.

Fig. 1. Surrounding environment of the antenna at GAMG (from left to right: east, west, south and north views).
GPS의 도플러 관측치를 기반으로 Eq. (7)의 가중치 행렬 적용 여부에 따른 좌표 추정 성능 차이를 분석하였다. 미지수 벡터와 시스템 행렬은 각각 Eqs. (10, 11)을 사용했으며, 결과는 RMSE와 오차 분포의 변화를 기준으로 평가하였다. Fig. 2에는 수평 방향 오차의 산점도와 남-북, 동-서 및 수직 방향의 시계열 오차 그래프를 나타내었다.
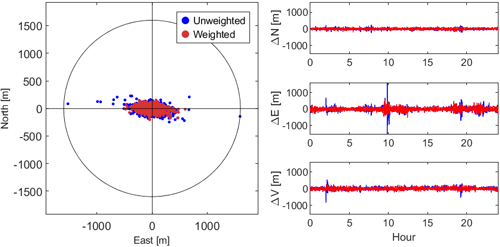
Fig. 2. Comparison of GPS-only Doppler-based errors with and without weighting in static (GAMG).
Fig. 2의 산점도에서 나타난 검은색 원은 가중치를 부여하지 않은 측위 결과의 최대 수평 오차를 의미하며, 참값을 기준으로 반경 1599.71 m를 나타낸다. 시계열 그래프에서는 남-북 방향의 오차 변화가 상대적으로 미미하게 나타난 반면, 동-서 방향과 수직 방향에서 발생하던 과대오차가 가중치 적용 후 현저히 감소하였다. 특히, 동-서 방향의 경우, 가중치 적용에 따라 산점도에서도 명확히 구분될 정도로 오차 분포가 중앙에 집중되어 정밀도가 크게 향상된 것으로 확인되었다.
Table 1에 가중치 적용 여부에 따라 수평, 수직 및 3차원 RMSE와 수평과 3차원의 최대 오차를 함께 제시하였다. 가중치 적용 시 측위 오차는 비가중치 조건 대비 모든 방향에서 감소하였다. 수평 RMSE는 133.05 m에서 106.84 m로 약 19.6% 감소하였으며, 수직 RMSE는 78.62 m에서 64.79 m로 17.6% 감소하였다. 또한 3차원 RMSE는 154.54 m에서 124.95 m로 19.1% 감소하였다. 최대 오차의 경우, 수평 방향에서는 1599.71 m에서 600.01 m로 62.5% 감소, 수직 방향에서는 535.09 m에서 267.25 m로 50.1% 감소하였으며, 3차원 오차는 1631.61 m에서 623.65 m로 61.8% 감소하였다. 가중치 적용으로 최대 오차가 감소하면서 전체적인 오차 분포가 안정화되었고, 그 결과 RMSE 값이 전반적으로 낮게 나타난 것을 확인했다.
Table 1. Comparison of positioning RMSE with and without weighting.
| Condition | RMSE [m] | Max error [m] | ||||
|---|---|---|---|---|---|---|
| Horizontal | Vertical | 3D | Horizontal | Vertical | 3D | |
| Unweighted | 133.05 | 78.62 | 154.54 | 1599.71 | 535.09 | 1631.61 |
| Weighted | 106.84 | 64.79 | 124.95 | 600.01 | 267.25 | 623.65 |
이번 절에서는 Eq. (7)의 가중치 행렬을 적용한 상태에서, GNSS 신호 조합에 따른 도플러 기반 측위 성능을 정량적으로 평가하였다. 분석 대상은 GPS 단독 (G), GPS + Galileo (G+E), GPS + BeiDou (G+C), GPS + Galileo + BeiDou (G+E+C)의 네 가지 조합이며, 미지수 벡터와 시스템 행렬은 각각 Eqs. (10, 11)을 사용하였다.
Fig. 3은 G와 G+E+C 조합의 좌표 오차 분포를 비교한 결과이다. 왼쪽의 산점도는 수평 방향의 좌표 오차를 나타내며, 검은색 원은 G의 최대 수평 오차를 의미하며 참값을 기준으로 반경 600.01 m를 나타낸다. 오른쪽의 그래프는 남-북, 동-서 및 수직 방향의 시계열 오차를 보여준다. 다중 GNSS 결합의 경우 오차 분포가 중앙에 밀집되어 있으며, 전반적인 오차 진폭이 감소하고 시간에 따른 변동성이 완화된 것을 확인할 수 있다. 특히 G 대비 G+E+C 조합에서는 과대오차가 크게 억제되어, 측위 결과의 안정성이 향상된 것을 확인할 수 있다.
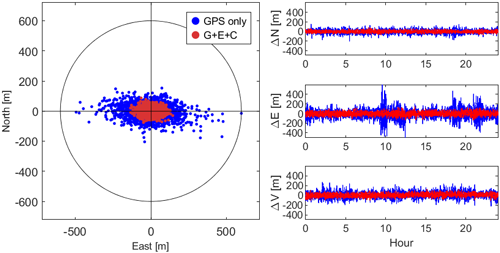
Fig. 3. Comparison of positioning error characteristics between GPS only and GPS + Galileo + BeiDou combination in static (GAMG).
Table 2에 각 신호 조합별 수평, 수직, 3차원 RMSE와 함께 가시 위성의 최대 및 최소 개수를 제시하였다. G의 3차원 RMSE는 124.95 m로 나타났으며, GNSS 조합을 확장할수록 오차가 점진적으로 감소하는 경향을 보였다. G 대비 G+E 조합에서는 3차원 RMSE가 83.97 m로 약 34% 감소하였고, G+C 조합에서는 64.05 m로 약 49% 감소하였다. 특히 G+E+C 조합은 56.80 m로 가장 낮은 3차원 RMSE를 보였으며, 단일 시스템 대비 약 55% 이상의 성능 향상을 확인할 수 있었다. 이러한 결과는 단순히 가시 위성 수의 증가뿐만 아니라 위성 궤도 분포의 다양화로 인한 관측 기하구조 개선 효과에 기인한 것으로 해석된다.
Table 2. Positioning RMSE and number of visible Satellites for different signal combinations.
| Signal combination | RMSE [m] | Number of visible satellites | |||
|---|---|---|---|---|---|
| Horizontal | Vertical | 3D | Max | Min | |
| G | 106.84 | 64.79 | 124.95 | 12 | 7 |
| G+E | 69.00 | 47.85 | 83.97 | 22 | 13 |
| G+C | 51.05 | 38.69 | 64.05 | 30 | 19 |
| G+E+C | 45.18 | 34.42 | 56.80 | 38 | 26 |
앞 절에서는 가중치 적용 상태에서 GNSS 신호 조합에 따른 좌표 추정 성능을 분석하였다. 본 절에서는 가중치 적용 상태에서 수신기의 좌표와 속도를 동시에 추정하는 경우에 대한 성능을 평가하였다. 이를 위해 Eqs. (4, 6)의 미지수 벡터와 시스템 행렬을 사용하였으며, G, G+E, G+C, G+E+C의 네 가지 조합을 대상으로 비교하였다.
Fig. 4는 G와 G+E+C 조합에서의 속도 성분 결과를 나타낸다. 왼쪽의 산점도는 수평 방향 오차를 나타내고 검은색 원은 G의 최대 수평 오차를 의미하며 참값을 기준으로 반경 0.45 m/s를 의미한다. 또한, 오른쪽의 시계열 그래프는 남-북, 동-서 및 수직 방향 속도 오차의 시간적 변화를 나타낸다.
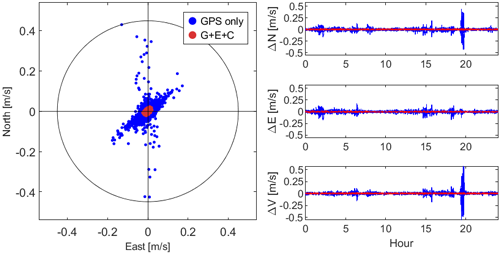
Fig. 4. Velocity error characteristics between GPS only and GPS + Galileo + BeiDou combination in static (GAMG).
산점도에서 G의 속도 오차는 남-북 방향의 일부 이상치를 제외하면 북동-남서 방향으로 길게 분산된 형상을 보였으며, 이는 Fig. 3에서 확인된 좌표 오차가 주로 동-서 방향으로 확장된 분포를 보인 것과 대조적이다. G+E+C 조합의 경우 오차 분포가 중심부에 밀집되어 있으며, 전체적인 크기가 감소하였으나 여전히 북동-남서 방향으로 분산된 형상을 보인다. 시계열 그래프에서는 G의 경우 약 20시 부근에서 남-북과 수직 오차가 ±0.4 m/s 이상의 과대오차가 발생한 반면, G+E+C 조합에서는 전 구간에서 ±0.05 m/s 이내로 안정적으로 유지되었다. 특히 남-북과 수직 성분에서 시간적 변동성이 현저히 완화되어, 다중 GNSS 결합이 속도 추정의 안정성과 신뢰도 향상에 효과적으로 기여함을 확인할 수 있다.
Table 3에 각 신호 조합 별 수평, 수직, 3차원 좌표 RMSE와 함께 속도 RMSE를 동일한 성분별로 제시한다. G의 경우 RMSE는 3차원 기준 393.21 m로 신호 조합 중 가장 크게 나타났으나, G+E 조합에서는 116.41 m, G+C 조합에서는 82.28 m, G+E+C 조합에서는 69.08 m로 개선되어, 다중 GNSS 조합을 적용할수록 오차가 감소하며 좌표 정확도 향상에 효과적임을 확인할 수 있었다. 다만, Table 2와 비교했을 때 속도를 동시에 추정하는 경우 전반적인 좌표 RMSE가 더 크게 나타났으며, 이는 좌표와 속도를 동시에 추정함에 따라 좌표 추정이 상대적으로 불안정해진 결과로 해석된다. 속도 RMSE 또한 다중 GNSS 조합에 따라 개선되는 경향을 보였다. G의 경우 3차원 속도 RMSE가 0.06 m/s로 가장 크게 나타났으나, G+E 조합에서는 0.02 m/s, G+C 조합 및 G+E+C 조합에서는 0.01 m/s로 가장 안정적인 성능을 보였다. 이 감소율은 좌표 추정에서 나타난 경향과 유사하며, 다중 GNSS 조합이 속도 추정의 정밀도 향상에도 효과가 있음을 보여준다. 전반적으로 속도 추정 RMSE는 모든 조합에서 0.01~0.06 m/s 사이에 머물러, 일관되고 안정된 추정 성능을 확보하고 있음을 확인할 수 있다.
Table 3. Positioning and Velocity RMSE with different GNSS signal combinations.
| Signal combination | RMSE | |||||
|---|---|---|---|---|---|---|
| Positioning [m] | Velocity [m/s] | |||||
| Horizontal | Vertical | 3D | Horizontal | Vertical | 3D | |
| G | 250.86 | 302.79 | 393.21 | 0.05 | 0.04 | 0.06 |
| G+E | 93.15 | 69.81 | 116.41 | 0.02 | 0.01 | 0.02 |
| G+C | 65.45 | 49.87 | 82.28 | 0.01 | 0.01 | 0.01 |
| G+E+C | 55.48 | 41.16 | 69.08 | 0.01 | 0.01 | 0.01 |
3.1절에서는 가중치 적용 여부와 신호 조합에 따른 도플러 기반 좌표 및 속도 추정 성능을 분석하였다. 분석 결과, 속도 추정은 전반적으로 우수한 정확도를 보였으나, 모든 에폭(epoch)에서 수 cm/s 수준의 오차가 존재하여 참값과 완전히 일치하지 않았다. 본 연구에서는 이러한 속도 추정 오차를 각 에폭에서의 대표적인 보정 값으로 활용하여, 좌표 추정 과정의 정확도를 개선하는 방안을 제시하였다.
기존 방법은 최소제곱법 과정에서 수신기 속도를 0 m/s로 고정한 뒤 좌표만을 추정하는 방식이었다. 그러나 이 경우 도플러 관측치의 오차가 크게 누적되어, 관측치와 계산치 간의 불일치가 뚜렷하게 나타나는 한계가 있었다. 이를 개선하기 위하여, 본 연구에서는 각 에폭에서 수신기 속도를 먼저 추정하고, 해당 추정치를 보정항으로 반영하여 수신기 좌표를 추정하는 방식을 고안하였다.
개선 방법을 적용하기 위해 수신기의 속도만을 추정하는 별도의 미지수 벡터와 시스템 행렬을 정의할 필요가 있다. Eqs. (4, 6)으로 표현되는 일반적인 모델을 정지 가정 하에 미지수 벡터와 시스템 행렬을 Eqs. (10, 11)로 단순화한 과정과 동일한 방식으로, 속도 추정을 위한 미지수 벡터와 시스템 행렬을 새롭게 구성하였고, 그 결과는 Eqs. (12, 13)과 같이 정리하였다.
$$X = [V_{r}^{T} \quad \dot{t}_{r}]^{T} = [\dot{x}_{r} \quad \dot{y}_{r} \quad \dot{z}_{r} \quad \delta \dot{t}_{r}]^{T}$$
$$H^{i} = [\frac{\partial \dot{p}}{\partial \dot{x}_{r}} \quad \frac{\partial \dot{p}}{\partial \dot{y}_{r}} \quad \frac{\partial \dot{p}}{\partial \dot{z}_{r}} \quad \frac{\partial \dot{p}}{\partial \delta \dot{t}_{r}}]$$
좌표 추정 단계에서는 미지수 벡터와 시스템 행렬은 기존과 동일하게 Eqs. (10, 11)을 적용하였으며, 추정된 수신기 속도는 도플러 관측 방정식(Eq. (3))의 수신기 속도 벡터($V_r$)에 반영하여 도플러 계산값을 산출하는 데 사용하였다. 이러한 절차를 통해 각 에폭별 속도 추정 값을 좌표 추정 과정에 반영함으로써, 기존 방식에서 나타났던 관측치와 계산치 간의 불일치를 줄이고 좌표 추정의 정확도를 개선하고자 하였다.
Fig. 5는 G+E+C 조합에서 제안된 방법(velocity-aided method)과 기존 방법(zero velocity method)의 성능을 시각적으로 비교하였다. 왼쪽의 산점도는 수평 방향 오차를 나타내고 검은색 원은 기존 방법의 최대 수평 오차를 의미하며 참값을 기준으로 반경 147.90 m를 나타낸다. 또한, 오른쪽의 시계열 그래프는 남-북, 동-서 및 3차원 속도 오차의 시간적 변화를 나타낸다.
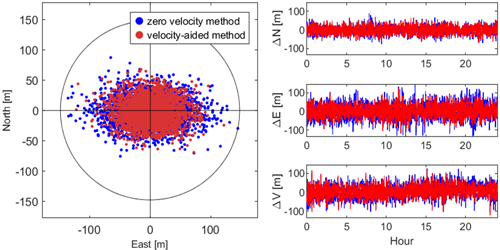
Fig. 5. Positioning error characteristics with GPS + Galileo + BeiDou combination: comparison between zero velocity method and velocityaided method.
산점도에서 기존 방법은 동-서 방향으로 길게 분산된 형태를 보였으며, 중심에서 벗어난 외곽 영역에서도 비교적 넓게 퍼져 있는 양상을 나타냈다. 반면 제안된 방법은 오차가 중심부에 밀집되고 분포 형상이 원형에 가까워, 전체적으로 수평 안정성이 향상된 모습이 보였다. 시계열 그래프에서도 동일한 경향이 나타났다. 기존 방법은 일부 시간대에서 동-서와 수직 오차에서 100 m에 이르는 과대오차가 발생한 반면, 제안된 방법은 모든 성분에서 진폭이 감소하고 평균값을 중심을 안정적으로 유지되었다. 남-북 시계열 그래프에서도 오차의 시간적 변동성이 완화되어, 제안된 방법이 전반적인 오차 안정성 개선에 효과적임을 확인할 수 있었다.
이러한 경향은 Table 4의 정량적 분석에서도 일치하였다. 이번 연구에서는 G, G+E, G+C, G+E+C의 네 가지 신호 조합을 대상으로 성능을 평가하였으며, 성능 지표로는 RMSE를 사용하였다.
Table 4. Positioning RMSE of velocity-aided method for different signal combinations.
| Signal combination | RMSE [m] | ||
|---|---|---|---|
| Horizontal | Vertical | 3D | |
| G | 66.21 | 41.67 | 78.24 |
| G+E | 51.16 | 35.70 | 62.39 |
| G+C | 39.98 | 31.05 | 50.63 |
| G+E+C | 36.67 | 29.16 | 46.85 |
기존 방법 (Table 2)과 제안된 방법 (Table 4)을 비교하면, G를 기준으로 기존 방법의 3차원 RMSE는 124.95 m였으나 제안된 방법에서는 78.24 m로 약 37% 감소하였다. G+E 조합에서는 83.97 m에서 62.39 m로 줄어들어 약 26%가 개선되었으며, G+C 조합에서는 64.05 m에서 50.63 m로 약 21% 개선되었다. 특히 G+E+C 조합에서는 기존의 56.80 m에서 46.85 m로 약 17% 감소하여, 다중 GNSS 조합에서도 안정된 성능 향상이 나타났다.
이동 환경은 2025년 4월 25일, 인천 송도국제도시 내 인천대학교 인근 도심 지역(SONG)에서 차량 주행 중 관측이 이루어졌으며, 약 15분간 GPS L1, Galileo E1 및 BeiDou B2 도플러 관측치를 1초 간격으로 연속적으로 수집하였다. 본 주행 구간은 정지와 재출발, 가속 및 감속이 반복되는 도심 주행 특성을 포함하며, 속도는 약 0~60 km/h로 변화하였다. 또한 주변 환경은 개활지 구간과 나무 및 고층 건물로 인한 부분적 신호 차폐 구간이 동시에 포함되어 있다. 이때 사용된 장비는 ㈜아모텍 패치형 안테나와 u-blox사의 ZED-F9P 모듈이 탑재된 ㈜피피솔의 RTAP2U 수신기이다. 이동 환경에서의 주행 경로는 위성 영상을 이용하여 Fig. 6에 도식화하였다.
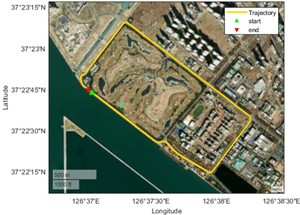
Fig. 6. Driving Trajectory of the vehicle in SONG.
본 연구는 Eq. (6)을 기반으로 수신기의 좌표를 추정하며, 이를 통해 수신기의 속도 또한 계산할 수 있으므로 좌표뿐만 아니라 속도 추정 정확도 또한 비교 대상에 포함한다. RTAP2U 수신기는 국토지리정보원의 VRS 서비스를 이용한 RTK 모드에서 측위하였으며, FIX 상태에서 수 cm 수준의 정확도를 보장하는 것으로 Kim et al. (2021)에서 그 성능이 검증된 바 있다. 따라서 RTK 측위 결과를 좌표 추정의 참값으로 활용하였으며, 속도 추정의 경우, NMEA 파일의 GPVTG 메시지를 통해 속도 정보가 제공되지만 이는 스칼라 형태에 불과하다. 이에 본 연구에서는 RTK 측위 결과를 0.001초 간격으로 3차 스플라인 보간 이후, 중심 차분을 적용하여 시간에 따른 X, Y, Z 성분별 속도 참값을 생성하였다. 이를 통해 수신기 속도 추정 결과를 성분별로 직접 비교할 수 있도록 하였다.
해당 실험에서는 G+E+C 조합 성능을 평가하였다. Fig. 7은 좌표 추정 결과로, 이동 중 측정 된 오차 분포의 특성을 보여준다. 왼쪽의 산점도는 수평 방향의 좌표 오차를 나타내고 검은색 원은 최대 수평 오차를 의미하며, 참값을 기준으로 반경 2903.31 m를 나타낸다. 좌표 오차가 동-서 방향으로 길게 분산되는 경향이 나타났으며, 이는 위성 배치의 기하학적 한계와 도심 지역의 난수신 환경이 복합적으로 작용한 결과로 해석된다. 오른쪽의 시계열 그래프는 남-북, 동-서 및 수직 방향 오차의 시간적 변화를 나타내며, 특정 구간에서 수 km 단위의 과대오차가 관찰되었다. 남-북, 동-서, 수직 순으로 과대오차가 크게 나타났으며, 이러한 불안정성이 평균 오차를 확대시키고 전체적인 좌표 추정의 일관성을 약화시키는 주요 요인으로 분석된다.
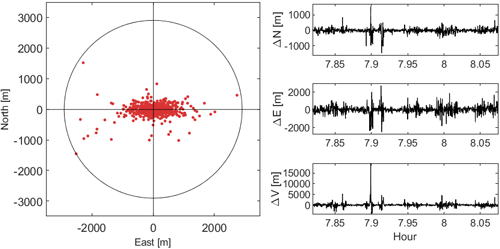
Fig. 7. Positioning error characteristic with GPS + Galileo + BeiDou combination in kinematic (SONG).
Fig. 8은 동일 조건에서의 속도 추정 결과를 나타낸다. 왼쪽의 산점도는 수평 방향의 속도 오차를 나타내고 검은색 원은 최대 수평 오차를 의미하며, 참값을 기준으로 반경 2.69 m/s를 나타낸다. 오른쪽의 시계열 그래프는 남-북, 동-서 및 수직 방향 오차의 시간적 변화를 나타낸다. 왼쪽의 산점도에서 속도 오차는 중심부에 밀집되어 있으며, 전반적으로 높은 정확도와 정밀도를 보였다. 이는 좌표 추정 결과 (Fig. 7)와 달리, 속도 오차가 방향성 없이 균일하게 분포함을 의미한다. 오른쪽의 시계열 그래프에서는 전체 구간에서 대부분 ±0.3 m/s 이내로 안정적으로 유지되었다. 다만, 남-북 성분에서 일시적으로 약 -2.5 m/s까지 오차가 증가한 구간이 관찰되었으나, 이를 제외하면 모든 성분의 속도 오차는 평균값 부근에서 집중되어 있으며, 장시간 동안 안정적인 추세를 유지하였다. 이와 같은 결과는 도심 이동 환경에서도 도플러 기반 속도 추정이 잡음이나 위성 차폐에 비교적 둔감하게 반응하였다. 따라서, 속도 추정 결과는 좌표 추정과 비교할 때 오차가 좁은 범위 내에서 분포하며, 전반적으로 안정적인 특성을 보였다.
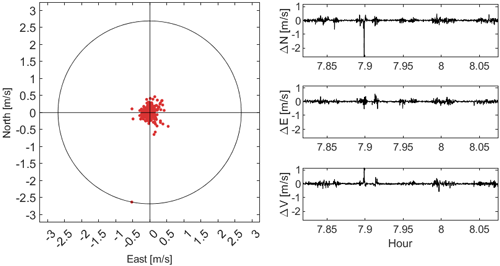
Fig. 8. Velocity error characteristic with GPS + Galileo + BeiDou combination in kinematic (SONG).
이러한 경향은 정량적 분석에서도 일치하였으며, Table 5에 수평, 수직, 3차원 좌표 RMSE와 함께 속도 RMSE를 동일한 성분별로 제시하였다. 이동 환경에서의 좌표 추정 성능은 정지 환경(GAMG)에 비해 크게 저하되는 것으로 나타났다. G+E+C 조합을 사용하였음에도 불구하고, 수평 RMSE는 353.86 m, 수직 RMSE는 306.52 m, 3차원 RMSE는 468.16 m로 기록되었다. 이는 정지 상태의 3차원 RMSE와 비교할 때 약 8배 이상 증가한 값으로, 도심 환경에서의 건물 차폐, 다중경로 오차, 가시위성의 불균형이 주요 원인으로 분석된다. 반면, 속도 추정 성능은 상대적으로 안정적인 양상을 보였다. 정지 상태의 3차원 RMSE와 비교할 때 약 10배 이상 증가하였으나, 절대적인 RMSE가 0.11 m/s 수준으로 매우 작아 실제 응용에서는 허용 가능한 오차 범위로 평가된다. 도심 환경에서 다중경로와 위성 차폐로 인한 좌표 오차가 크게 확대되는 반면, 도플러 기반 속도 추정은 이러한 영향에 상대적으로 덜 민감하게 반응한다는 점을 보여준다.
Table 5. Positioning and velocity RMSE with GPS + Galileo + BeiDou combination in kinematic (SONG).
| Signal combination | RMSE | |||||
|---|---|---|---|---|---|---|
| Positioning [m] | Velocity [m/s] | |||||
| Horizontal | Vertical | 3D | Horizontal | Vertical | 3D | |
| G+E+C | 353.86 | 306.52 | 468.16 | 0.09 | 0.06 | 0.11 |
3장에서 수행한 분석 결과, 도플러 관측치 단독 좌표 추정은 수백 m 수준의 오차가 발생하여 실용적 활용에 한계가 있었다. 반면, 속도 추정은 정지 및 이동 환경 모두에서 수신기의 속도를 높은 정확도로 추정할 수 있음을 확인하였다. 특히 도심과 같은 난수신 환경에서도 속도 추정은 수십 cm/s 이내의 정밀도를 유지하여, 도플러 기반 속도 정보가 안정적인 상태 변수로 활용될 수 있음을 보였다.
이러한 도플러의 특성을 활용하기 위해, 4장에서는 EKF 기반 결합 모델을 구성하여 코드의사거리와 도플러 관측치를 통합적으로 활용하는 방안을 제시한다. 4.1절에서는 제안된 EKF 모델의 수학적 구조와 상태 전이 과정 및 측정 잡음 공분산에 대한 세부 설명을 다루며, 4.2절에서는 실제 SONG 데이터에 적용한 결과를 제시한다. 이어 4.3절에서는 도심과 같은 난수신 환경에서 코드의사거리의 관측치가 불안정할 때, 도플러 기반 속도 추정이 좌표 추정 성능을 보완할 수 있는 모델을 제안하고 실험적으로 분석한다.
EKF는 비선형 시스템에서의 상태 변수를 최적으로 추정하기 위한 확장된 칼만 필터 기법으로, GNSS 기반의 좌표 추정 및 항법 시스템에서 널리 활용된다. EKF는 시간 순차적인 필터링 알고리즘으로, 예측 단계와 갱신 단계로 구성되며 (Choi et al. 2021), 본 연구에서는 코드의사거리와 도플러 관측치를 함께 활용하는 구조로 설계하였다.
코드의사거리 관측치는 수신기 좌표와 시계 오차에 대한 직접적인 제약 조건을 제공하지만, 속도 성분에 대한 정보가 부족하다. 반면 도플러 관측치는 위성-수신기 간 상대 속도에 따른 주파수 이동 정보를 포함하므로, 속도 벡터 추정에 필수적으로 사용될 수 있다. 또한 도플러는 잡음에 강인하고 짧은 간격의 동적 변화를 민감하게 반영하기 때문에 (Psiaki 2001), EKF 내에서 예측(predict) 단계의 정확도를 향상시키는 데 기여한다. 예측 단계 정확도가 향상되면 EKF의 갱신(update) 단계에서 칼만 이득과 상태 갱신량이 안정적으로 유지된다. 이러한 특성을 반영하여, 도플러 기반 속도 추정을 상태 전이에 포함시킴으로써 전체 좌표 추정의 안정성과 정확도를 개선하고자 하였다.
본 연구에서 정의한 상태 벡터는 수신기의 좌표($P_r$), 속도($V_r$), 시계 오차($\delta t_{r}$) 및 시계 드리프트($\delta \dot{t}_{r}$)를 포함하여 총 8개의 항목으로 구성되며, 이는 Eq. (14)와 같이 표현된다.
$$X = [P_{r}^{T} \quad \delta t_{r} \quad V_{r}^{T} \quad \delta \dot{t}_{r}]^{T} = [x_{r} \quad y_{r} \quad z_{r} \quad \delta t_{r} \quad \dot{x}_{r} \quad \dot{y}_{r} \quad \dot{z}_{r} \quad \delta \dot{t}_{r}]^{T}$$
시스템 행렬 $H$는 코드의사거리와 도플러 관측치에 대해 각각 선형화하여 구성한다. 코드의사거리 관측치는 수신기 좌표 및 시계 오차에 의존하며 Eq. (15)로 표현하였고, 도플러 관측치는 수신기 속도 및 시계 드리프트에 의존하며 Eq. (16)로 표현하였다. 최종적으로 두 식을 통합한 시스템 행렬은 Eq. (17)과 같다.
$$H_{pseudorange}^i = \begin{bmatrix} \frac{\partial p}{\partial x_r} & \frac{\partial p}{\partial y_r} & \frac{\partial p}{\partial z_r} & \frac{\partial p}{\partial \delta t_r} & 0 & 0 & 0 & 0 \end{bmatrix}$$
$$H_{doppler \ shift}^i = \begin{bmatrix} 0 & 0 & 0 & 0 & \frac{\partial \dot{p}}{\partial \dot{x}_r} & \frac{\partial \dot{p}}{\partial \dot{y}_r} & \frac{\partial \dot{p}}{\partial \dot{z}_r} & \frac{\partial \dot{p}}{\partial \delta \dot{t}_r} \end{bmatrix}$$
$$H^{i} = \begin{bmatrix} \frac{\partial p}{\partial x_{r}} & \frac{\partial p}{\partial y_{r}} & \frac{\partial p}{\partial z_{r}} & \frac{\partial p}{\partial \delta t_{r}} & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & \frac{\partial \dot{p}}{\partial \dot{x}_{r}} & \frac{\partial \dot{p}}{\partial \dot{y}_{r}} & \frac{\partial \dot{p}}{\partial \dot{z}_{r}} & \frac{\partial \dot{p}}{\partial \delta \dot{t}_{r}} \end{bmatrix}$$
여기서 위첨자 $i$는 $i$번째 위성을 의미하며, Eq. (17)에 따라 각 위성의 코드의사거리 및 도플러 관측 방정식이 통합되어 시스템 행렬 내 두 행으로 표현된다. 전체 시스템 행렬 $H$행의 수는 좌표 및 속도 추정에 사용되는 위성의 개수에 비례하여 구성된다.
상태 전이 행렬 $A$는 예측 단계에서 이전 시점의 상태 벡터를 기반으로 다음 시점의 상태를 산출하기 위해 사용된다. 본 연구에서는 수신기의 움직임이 비교적 짧은 시간 간격 $\Delta t$ 내에서는 일정하다고 가정하였다. 이에 따라, 현재 좌표는 이전 좌표에서 속도에 시간 간격을 곱한 이동 거리를 더하여 계산할 수 있다. 이러한 가정은 짧은 샘플링 간격에서 수신기의 이동을 단순하고 효율적으로 예측하기에 적합하다. 또한, 수신기 시계 오차와 시계 드리프트 역시 동일한 가정을 적용하였다. 따라서 상태 전이 행렬은 좌표와 속도 및 시계 오차와 시계 드리프트 간의 선형적 관계를 반영하며, 샘플링 간격 $\Delta t$에 따라 Eq. (18)과 같이 정의된다.
$$A = \begin{bmatrix} I_{4 \times 4} & I_{4 \times 4} \times \Delta t \\ 0 & I_{4 \times 4} \end{bmatrix}$$
여기서 $I_{4 \times 4}$는 $4 \times 4$ 단위행렬로, 대각 원소가 모두 1이고 나머지 원소가 0인 행렬이며 $I_{4 \times 4} \times \Delta t$항을 통해 짧은 시간 간격 내에서 수신기 속도 및 시계 드리프트가 일정하다고 가정된 상태 전이 관계를 표현하였다.
측정 잡음 공분산 행렬 $R$은 위성의 고도각($e$)과 $C/N_0$ 및 코드의사거리와 도플러의 분산 비율을 기반으로 Eq. (19)와 같이 설정하였다. 고도각이 7도 이하이거나 $C/N_0$가 35 미만인 위성은 관측에서 제외하였으며, 남은 위성들에 대해서는 두 요소에 따라 가중치를 차등적으로 부여하였다. 고도각이 낮을 수록 다중경로와 대기 지연에 의한 오차가 커지고, $C/N_0$가 낮을수록 신호 품질이 저하되므로, 각 관측치의 분산은 고도각과 $C/N_0$ 값에 반비례하도록 각각 Eqs. (20, 21)로 정의하였다. 이는 고도각이 높고 $C/N_0$가 우수한 위성일수록 작은 분산을 가지도록 하여 필터링 과정에서 더 높은 신뢰도를 반영할 수 있도록 한다. 추가적으로, 도플러 관측의 특성을 고려하여 코드의사거리와는 다른 분산 비율(scale)을 적용하여 Eq. (22)와 같이 정의하였으며, 이는 식별된 가중 계수를 통해 각 성분별로 조정하였다.
$$R = R_{e} \circ R_{C/N_{0}} \circ R_{scale}$$
$$R_{e}^{i} = \begin{cases} 1(e > 50^{\circ}) \\ \frac{1}{\sin(e)}(e \le 50^{\circ}) \end{cases}$$
$$R_{C/N_{0}}^{i} = \frac{50}{C/N_{0}} \times 4$$
$$R_{scale}^{i} = \begin{cases} 1.2^{2}(pseudorange) \\ 0.01^{2}(Doppler \ shift) \end{cases}$$
여기서 위첨자 $i$는 시스템 행렬과 동일하게 $i$번째 위성을 의미한다. 최종적으로, 본 연구에서 제안한 EKF 결합 모델은 상태 벡터, 시스템 행렬, 상태 전이 행렬, 그리고 측정 잡음 공분산 행렬을 통해 구성되었다. 이러한 구조는 코드의사거리와 도플러 관측치를 상호 보완적으로 활용함으로써, 좌표와 속도를 동시에 추정할 수 있도록 설계되었다. 특히, 도플러 관측치를 기반으로 한 속도 추정이 상태 전이 과정에 반영됨에 따라 예측 단계의 신뢰도가 향상되고, 결과적으로 갱신 단계에서 안정적인 추정 성능을 확보할 수 있다.
앞 절에서 정의한 EKF 기반 결합 모델을 바탕으로, 본 절에서는 SONG 데이터를 이용하여 측위 성능을 평가하였다. 좌표와 속도의 참값은 3.3절에서 정의한 RTK 기반 결과를 사용하였다. 좌표 추정의 성능 평가에 대해서는 코드의사거리 단독 EKF 기법과 비교하여 수행하였으며, 속도 추정은 코드의사거리 단독 EKF 기법에서는 산출이 불가능하므로 참값과 제안된 결합 모델의 결과를 직접 비교하였다.
본 연구의 EKF 결합 모델(PR + DOP) 및 코드의사거리 단독 모델(PR only) 모두 코드의사거리 관측치로 GPS와 Galileo 신호만을 사용하였으며, 도플러 관측치는 GPS, Galileo, BeiDou의 세 신호를 모두 활용하였다. 이는 SONG 데이터에서 BeiDou 코드의사거리 관측치가 다른 시스템에 비해 결측이 자주 발생하거나 비정상적인 잔차를 보이는 경우가 많아, 이러한 관측치를 포함할 경우 오히려 측위 정확도를 저하시킬 가능성이 있기 때문이다.
Fig. 9는 PR only와 PR+DOP의 좌표 추정 결과를 비교한 것이다. 왼쪽의 산점도는 수평 방향 오차를 나타내고 검은색 원은 PR only의 최대 수평 오차를 의미하며 참값을 기준으로 반경 5.62 m를 나타낸다. 또한, 오른쪽의 시계열 그래프는 남-북, 동-서 및 수직 방향 오차의 시간적 변화를 나타낸다.
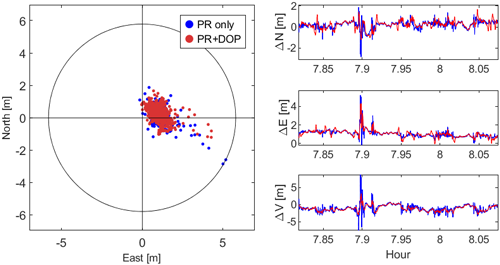
Fig. 9. Positioning error characteristics between PR only and PR+DOP in kinematic (SONG).
왼쪽의 산점도에서는 두 기법 모두 오차가 동쪽 방향으로 편향된 분포를 보였으며, 이는 SONG 데이터 내 위성 배치 불균형에 기인한 것으로 해석된다. 그러나 결합 모델은 기존 방법에 비해 오차가 밀집되어 정밀도가 향상된 모습을 보였다. 오른쪽의 시계열 그래프에서는 수직 오차가 PR only의 경우 7.9시 부근에서 약 -5~7.5 m 이내의 급격한 오차 증가가 일어난 반면 PR+DOP는 진폭이 감소하고 안정적으로 유지되는 특성을 보였다.
Fig. 10은 PR+DOP의 속도 추정 결과를 나타낸다. 왼쪽의 산점도는 수평 방향 오차를 나타내고 검은색 원은 PR only의 최대 수평 오차를 의미하며 참값을 기준으로 반경 0.67 m/s를 나타낸다. 또한, 오른쪽의 시계열 그래프는 남-북, 동-서 및 수직 방향 속도 오차의 시간적 변화를 나타낸다.
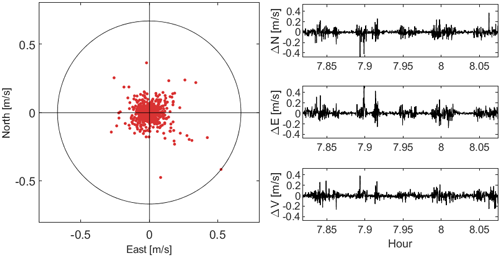
Fig. 10. Velocity error characteristics with PR+DOP in kinematic (SONG).
산점도에서 속도 오차는 좌표 오차와 달리 중심에 밀집되며 균일하게 분포하였다. 오른쪽의 시계열 그래프에서는 대부분 구간에서 ±0.3 m/s 이내로 유지되며 안정적인 추세를 보였다. 일부 구간에서 급격한 오차의 변동이 관찰되었으나, 전반적으로 오차는 참값 부근에 집중되어 높은 정밀도와 정확도를 유지하였다.
이러한 경향은 Table 6의 정량적 분석에서도 나타났다. Table 6에 PR only와 PR+DOP의 수평, 수직, 3차원 좌표 RMSE와 함께 속도 RMSE를 동일한 성분별로 제시하였다. 좌표 추정에서 PR only의 3차원 RMSE 2.070 m였던 반면, PR+DOP에서는 1.865 m로 약 10% 감소하였다. 이러한 개선은 수평과 수직 성분에서도 일관되게 나타나, 모든 방향에서 오차가 감소하였다. 속도 추정 결과는 수평, 수직, 3차원 RMSE가 각각 0.084 m/s, 0.053 m/s, 0.100 m/s로 나타났으며, 이동 환경에서도 안정적인 추정 정확도를 유지함을 의미한다. 따라서, 결합 모델은 코드의사거리 단독 모델 대비 좌표 정확도를 개선하고 속도 추정의 안정성을 확보하였으며, 코드의사거리와 도플러 관측치를 상호 보완적으로 활용하는 이동 환경에서의 GNSS 기반 측위 성능 향상에 효과적임을 보여준다.
Table 6. Positioning and velocity RMSE comparison between PR only and PR+DOP in kinematic (SONG).
| EKF model | RMSE | |||||
|---|---|---|---|---|---|---|
| Positioning [m] | Velocity [m/s] | |||||
| Horizontal | Vertical | 3D | Horizontal | Vertical | 3D | |
| PR only | 1.329 | 1.588 | 2.070 | – | – | – |
| PR + DOP | 1.224 | 1.395 | 1.856 | 0.084 | 0.053 | 0.100 |
4.2절에서는 SONG 데이터를 대상으로 전체 주행 구간에 대한 EKF 기반 결합 모델의 성능을 평가하였다. 그러나 SONG 데이터에는 일반적인 도심 환경뿐만 아니라, 고층 건물이나 나무 등에 의해 신호가 부분적으로 차폐되는 난수신 환경도 포함되어 있다. 본 연구에서는 반송파 위상 관측치가 2개 이상 결측된 에폭을 난수신 환경으로 정의하였다.
Table 7은 난수신 환경에서의 수평, 수직, 3차원 좌표 RMSE와 함께 속도 RMSE를 나타낸 것이다. Table 6과 비교했을 때, 3차원 좌표 RMSE는 약 23% 증가하였지만 속도 RMSE는 모든 성분에서 동일한 수준을 유지하고 있다. 이는 난수신 환경에서 코드의사거리 관측치의 품질이 급격히 저하되거나 불안정하게 수신됨에 따라 좌표 추정 성능이 크게 악화되는 경향을 보인다. 반면 도플러 관측치는 상대적으로 안정적으로 수신되어, 속도 추정이 일정 수준 이상 유지되는 특징을 보여준다.
Table 7. Positioning and velocity RMSE of PR+DOP in challenging urband multipath conditions.
| EKF model | RMSE | |||||
|---|---|---|---|---|---|---|
| Positioning [m] | Velocity [m/s] | |||||
| Horizontal | Vertical | 3D | Horizontal | Vertical | 3D | |
| PR + DOP | 1.528 | 1.710 | 2.294 | 0.084 | 0.053 | 0.100 |
이와 같은 특성의 차이에 착안하여, 본 연구에서는 도플러 기반 속도 추정치를 활용해 좌표 추정을 보정하는 방법을 고안하였다. 실제 분석에서 난수신 환경의 3차원 좌표 RMSE는 약 2 m 수준으로 나타난 반면, 속도 RMSE는 0.1 m/s 수준으로 매우 안정적인 값을 보였다. 이러한 추정 결과는 속도 정보를 시간 간격에 대해 적분하여 좌표를 보정하는 방식으로 단기간 내 좌표 변화를 신뢰성 있게 예측할 수 있다. 이와 같은 개념에 기반하여, 본 연구는 속도 추정의 안정성을 좌표 보정 과정에 확장함으로써 코드의사거리 품질 저하로 인한 좌표 추정 오차를 완화하는 방법을 제안하였다. 제안된 방법은 이전 에폭과 현재 에폭을 이용하여 좌표를 보정하는 방식이며, 이를 수식으로 나타내면 Eq. (23)과 같다.
$$P_{t} = P_{t-1} + \frac{V_{t-1} + V_{t}}{2} \times \Delta t$$
여기서 $P_t$는 $t$ 시점의 추정할 좌표 벡터이고 $P_{t-1}$은 이점 시점의 추정된 좌표 벡터이다. 또한, $V_{t-1}$과 $V_t$는 각각 $t-1$과 $t$ 시점에서 추정된 속도 벡터이며, $\Delta t$는 두 에폭 간의 시간 간격을 의미한다. 이는 도심 주행과 같이 신호 환경이 불안정한 상황에서 GNSS 측위 성능을 개선할 수 있는 효과적인 대안이 될 수 있음을 본 연구에서 제안한다.
또한 앞선 절에서 동쪽 방향으로 편향이 관찰되었다. 이는 도심 환경에서의 위성 배치 불균형 및 위성 궤도 특성으로 인해 북쪽 및 남쪽 방향의 위성이 부족하고, 그 중에서도 북쪽 방향 위성이 현저히 부족한 기하학적 제약에서 기인한 것으로 해석된다. 이러한 방향성 편향 문제를 완화하기 위해, 본 연구에서는 방위각($\alpha$) 정보를 측정 잡음 공분산 행렬에 반영하였다. 기존의 측정 잡음 공분산 행렬 (Eq. (19); $R_{origin}$)에 방위각 보정항을 추가한 형태로 구성하였으며, 그 결과는 Eqs. (24-25)와 같이 정리된다.
$$R = R_{origin} \circ R_{\alpha}$$
$$R_{\alpha}^{i} = \begin{cases} 0.04(-30^{\circ} \le \alpha \le 30^{\circ}) \\ 0.6(150^{\circ} \le \alpha \le 210^{\circ}) \\ 1(otherwise) \end{cases}$$
Fig. 11은 앞서 설명한 제안된 속도 기반 좌표 보정 및 방위각 기반 잡음 공분산 보정 모델 (PR+DOP (corrected))을 통해 추정한 좌표 오차의 분포를 나타냈다.
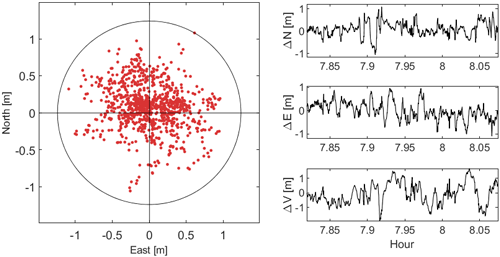
Fig. 11.Positioning error characteristics of PR+DOP (corrected) in kinematic (SONG).
왼쪽의 산점도는 수평 방향 오차를 나타내고 검은색 원은 최대 수평 오차를 의미하며 참값을 기준으로 반경 1.24 m를 나타낸다. 또한, 오른쪽의 시계열 그래프는 남-북, 동-서 및 수직 방향 속도 오차의 시간적 변화를 나타낸다. 산점도는 전반적으로 원형에 가까운 분포 형태를 보이며, Fig. 9에서 관찰된 동쪽 방향 편향이 현저히 완화되었다. 시계열 그래프에서는 모든 성분에서 오차가 대부분 ±1.2 m 이내로 유지되어 안정성을 확보하였으며, Fig. 9와 비교했을 때 모든 성분의 오차 진폭이 약 40% 이상 감소하였다. 이는 제안된 모델이 난수신 구간에서 오차 분포의 변동성을 감소시키고, 추정 결과의 안정성을 높였음을 보여준다.
Fig. 12는 오차 분포 편향을 보이기 위해 상단과 하단에 각각 PR only와 PR+DOP (corrected)의 남-북(ΔN), 동-서(ΔE), 수직(ΔV) 방향별 확률 밀도 히스토그램으로 나타낸 것이다. PR-only는 세 방향 모두에서 분포가 비대칭적이며, 특히 Fig. 9의 산점도에서 보였던 동쪽 편향이 동-서 방향 히스토그램에서도 중심이 1 m 부근에 위치하며 나타났다. 또한, 수직 방향에서도 평균이 -1.5 m 부근에 위치하며 편향이 확인되었고 다른 성분에 비해 넓은 오차 분포를 보였다. 반면 PR+DOP (corrected)는 남-북 방향에서 PR-only에 대비 분포 범위가 축소하고 중심부의 확률 밀도가 증가하였다. 동-서, 수직 방향의 평균이 각각 0.0047 m와 -0.071 m로 편향이 완화되었다. 전반적으로 세 방향 모두에서 분포가 정규형에 가까운 대칭 구조를 보였다. 이러한 결과는 제안된 모델이 오차의 분산을 효과적으로 감소시키고, 방향성 편향 발생을 억제함으로써 좌표 추정의 정밀도와 안정성을 동시에 향상시켰음을 보여준다.
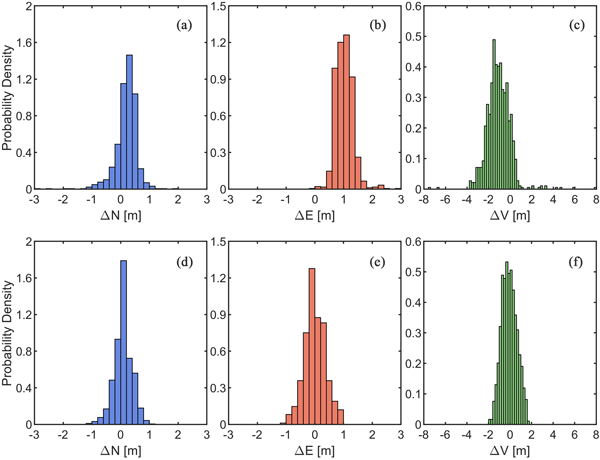
Fig. 12. Comparison of probability density histogram: (a) North, (b) East, (c) vertical components for PR only, and (d) North, (e) East, (f) vertical components for PR+DOP (corrected).
Fig. 12는 오차 분포 편향을 보이기 위해 상단과 하단에 각각 PR only와 PR+DOP (corrected)의 남-북(ΔN), 동-서(ΔE), 수직(ΔV) 방향별 확률 밀도 히스토그램으로 나타낸 것이다. PR-only는 세 방향 모두에서 분포가 비대칭적이며, 특히 Fig. 9의 산점도에서 보였던 동쪽 편향이 동-서 방향 히스토그램에서도 중심이 1 m 부근에 위치하며 나타났다. 또한, 수직 방향에서도 평균이 -1.5 m 부근에 위치하며 편향이 확인되었고 다른 성분에 비해 넓은 오차 분포를 보였다. 반면 PR+DOP (corrected)는 남-북 방향에서 PR-only에 대비 분포 범위가 축소하고 중심부의 확률 밀도가 증가하였다. 동-서, 수직 방향의 평균이 각각 0.0047 m와 -0.071 m로 편향이 완화되었다. 전반적으로 세 방향 모두에서 분포가 정규형에 가까운 대칭 구조를 보였다. 이러한 결과는 제안된 모델이 오차의 분산을 효과적으로 감소시키고, 방향성 편향 발생을 억제함으로써 좌표 추정의 정밀도와 안정성을 동시에 향상시켰음을 보여준다.
Table 8은 이러한 경향을 정량적으로 확인하기 위해 수평, 수직, 3차원의 좌표 및 속도 RMSE를 나타낸 것이다. 기존 EKF 결합 모델 (Table 6)과 비교할 때, 제안된 모델의 3차원 좌표 RMSE는 1.865 m에서 0.860 m로 약 54% 감소하였으며, 수평 및 수직 RMSE 또한 각각 약 60%와 49% 수준으로 감소하였다. 또한, 3차원 속도 RMSE도 약 7%의 개선 효과가 나타났다. 이는 제안된 보정 기법이 상대적으로 안정적이고 정확한 성능을 제공함을 의미한다.
Table 8. Positioning and velocity RMSE of PR+DOP (corrected) in kinematic (SONG).
| EKF model | RMSE | |||||
|---|---|---|---|---|---|---|
| Positioning [m] | Velocity [m/s] | |||||
| Horizontal | Vertical | 3D | Horizontal | Vertical | 3D | |
| PR + DOP (corrected) | 0.487 | 0.708 | 0.860 | 0.077 | 0.052 | 0.093 |
본 연구에서는 GNSS 도플러 관측치를 활용하여 수신기의 좌표 및 속도를 추정하고, 다양한 환경에서 측위 성능을 정량적으로 분석하였다. 정지 환경에서의 분석 결과, 도플러 기반 속도 추정은 모든 GNSS 신호 조합에서 수 cm/s 수준의 정밀도를 보이며, 도플러 관측치가 잡음에 강하고 짧은 시간 간격에서의 안정적인 성능이 실제 환경에서도 유효함을 확인하였다. 반면 좌표 추정의 경우, 도플러 단독으로는 수십 m 이상의 오차가 발생하였으나, 가중치 적용 및 다중 GNSS 조합을 통해 성능 개선이 가능함을 확인하였다. 또한, 본 연구는 각 에폭에서 추정된 속도를 수신기 속도 항에 반영하는 보정 방안을 제시하였다. 이를 통해 도플러 관측치 단독 좌표 추정의 불일치를 효과적으로 줄이고, 좌표 추정의 안정성과 정확도를 동시에 향상시킬 수 있음을 확인하였다. 이동 환경에서는 신호 차폐, 다중경로의 영향으로 도플러 관측치를 단독으로 활용한 좌표 추정의 경우 RMSE가 수백 m에 달하며 불안정한 양상을 보였으나, 속도 추정에서는 여전히 약 0.1 m/s의 3차원 RMSE를 유지하였다. 이는 도플러 관측치가 도심과 같은 열악한 수신 환경에서도 좌표 정보 단독 활용에는 한계가 있지만, 속도 정보 제공에는 안정적이라는 점을 보여준다.
또한, 본 연구에서는 코드의사거리와 도플러 관측치를 결합한 EKF 기반 모델을 제안하였다. 제안된 모델은 도플러 기반 속도 추정을 상태 전이에 반영함으로써 예측 단계의 정확도를 향상시키고, 코드의사거리 관측치의 불안정성을 보완하도록 설계되었다. 이동 환경에 적용한 결과, 코드의사거리 단독 EKF 대비 3차원 좌표 RMSE가 2.070 m에서 1.865 m로 약 10% 감소하였으며, 정밀도 또한 개선됨을 확인하였다. 특히 난수신 환경에서는 방위각 정보를 측정 잡음 공분산에 반영하고, 추정된 속도를 좌표 보정에 활용함으로써 좌표 불안정성과 동쪽 방향 편향이라는 두 가지 문제를 동시에 완화하였다. 그 결과, 제안된 모델의 3차원 좌표 RMSE는 0.860 m로 나타났다. 이는 코드의사거리 단독 EKF의 2.070 m 대비 약 58%, 도플러 기반 단독 최소제곱법 모델의 468.16 m 대비 약 99% 감소하였으며, 최대 오차 및 급격한 오차 증가 현상도 현저히 억제되는 성능 향상을 확인하였다.
본 연구는 도플러 관측치가 좌표 추정 단독 활용에는 한계가 있으나, 속도 추정 및 결합 모델에서 높은 정밀도와 정확도를 제공함을 정량적으로 확인하였다. 이러한 결과는 기존 도플러 기반 좌표 추정 연구에서 부족했던 실측 기반 검증과 성능 기준을 보완하고, 향후 LEO 위성의 도플러 관측치 기반 좌표 추정 연구에 참고 가능한 실험적 기준을 제시할 수 있을 것으로 기대된다.
본 연구는 2026년도 국토교통부의 재원으로 국토교통과학기술진흥원의 지원으로 수행된 연구임 (RS-2022-00141819, 초정밀 디지털 국토정보 획득을 위한 절대, 상대, 연속복합 측위 고도화 기술 개발).
Conceptualization, H.C. and K.P.; data curation, H.C.; formal analysis, H.C.; funding acquisition, K.P.; investigation, H.C.; methodology, H.C. and K.P.; project administration, K.P.; resources, H.C. and K.P; software, H.C.; supervision, K.P.; validation, H.C. and K.P.; visualization, H.C. and K.P.; writing—original draft, H.C.; writing—review and editing, H.C. and K.P.
The authors declare no conflict of interest.
Allahvirdi-Zadeh, A., El-Mowafy, A., & Wang, K. 2025, Doppler positioning using multi-constellation LEO satellite broadband signals as signals of opportunity, Journal of the Institute of Navigation, 72, navi.691. https://doi.org/10.33012/navi.691
Choi, B.-H., Sohn, D.-H., & Lee, S.-J. 2021, Accuracy improvement of multi-GNSS kinematic PPP with EKF smoother, JPNT, 10, 83-89. https://doi.org/10.11003/JPNT.2021.10.2.83
Clarizia, M., Gommenginger, C., Gleason, S., Srokosz, M., & Galdi, C., et al. 2009, Analysis of GNSS-R delay–Doppler maps from the UK-DMC satellite over the ocean, Geophysical Research Letters, 36, L02608. https://doi.org/10.1029/2008GL036292
EUSPA (European Union Agency for the Space Programme). 2019, PPP-RTK Market and Technology Report, Prague, Czech Republic: EUSPA. Available from: https://www.euspa.europa.eu/sites/default/files/calls_for_proposals/rd.03_-_ppp-rtk_market_and_technology_report.pdf
Hofmann-Wellenhof, B., Lichtenegger, H., & Walse, E. 2008, GNSS – Global Navigation Satellite Systems: GPS, GLONASS, Galileo, and More (Berlin, Germany: Springer Science & Business Media).
Kim, H.-I., Kim, Y.-G., & Park, K.-D. 2021, Performance evaluation of the low-cost, high-precision RTK device RTAP2U for GPS-based precise localization, JPNT, 10, 67-79. https://doi.org/10.11003/JPNT.2021.10.1.67
Li, L., Zhong, J., & Zhao, M. 2011, Doppler-aided GNSS position estimation with weighted least squares, IEEE Transactions on Vehicular Technology, 60, 3615-3624. https://doi.org/10.1109/TVT.2011.2163738
Liu, W., Jiang, H., Hu, Y., Lou, N., & Wang, S., 2024, A method for detecting cycle slips in GNSS high-precision positioning for USVs, Ocean Engineering, 313, 119634. https://doi.org/10.1016/j.oceaneng.2024.119634
Liu, X., Ribot, M., Gusi-Amigo, A., Closas, P., Garcia, A. R., et al. 2020, RTK Feasibility Analysis for GNSS snapshot Positioning, Proceedings of the 33rd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2020), Virtual, September 21-25 2020, pp.2911-2921. https://doi.org/10.33012/2020.17768
Misra, P., & Enge, P. 2011, Global Positioning System: Signals, Measurements, and Performance, Revised 2nd ed. (Lincoln, MA: Ganga-Jamuna Press).
Park, C.-S. 1999, A method of absolute positioning using GPS Doppler measurement, Telecommunications Review, 9, 50-57.
Psiaki, M. L. 2001, Block acquisition of weak GPS signals in a software receiver, Proceedings of the 14th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2001), Salt Lake City, Utah, 11-14 September 2001, pp.2838-2850.
Psiaki, M. L. 2021, Navigation using carrier Doppler shift from a LEO constellation: TRANSIT on steroids, Navigation, 68, 621-641. https://doi.org/10.1002/navi.438
Tay, S. & Marais, J., 2013, Weighting models for GPS Pseudorange observations for land transportation in urban canyons, Proceedings of the 6th European Workshop on GNSS Signals and Signal Processing, Munich, Germany, 5-6 December 2013.
Zhang, J., Zhang, K., & Grenfell, R. 2004, On the relativistic Doppler effects and high accuracy velocity determination using GPS, in Proceedings of GNSS 2004 – The International Symposium on GNSS/GPS, Sydney, Australia, 6-8 Dec 2004, pp.1-13. https://www.researchgate.net/publication/238619351
Zhou, Z. & Li, B. 2017, Optimal Doppler-aided smoothing strategy for GNSS navigation, GPS Solut., 21, 197-210. https://doi.org/10.1007/s10291-015-0512-y