Han Sol Park1,2![]() , Seong Yun Cho3
, Seong Yun Cho3![]() , JaeJun Yoo1,2†
, JaeJun Yoo1,2†![]()
1DNA+ Drone Platform Research Center, Electronics and Telecommunications Research Institute, Daejeon 34129, Republic of Korea
2Department of Artificial Intelligence, University of Science and Technology (UST), Daejeon 34113, Republic of Korea
3School of Smart Design Engineering, Kyungil University, Gyeongsan 38428, Republic of Korea
†Corresponding Author: JaeJun Yoo, E-mail: jjryu@etri.re.kr
Citation: Park, H. S., Cho, S. Y., & Yoo, J.J. 2026, Wi-Fi AP Localization: A Robust Approach Combining Directional Data Filtering, Multi-Start Initialization, and Parameter-Fixed Joint Refinement, Journal of Positioning, Navigation, and Timing, 15, 33-43.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2026 March, Volume 15, Issue 1, pages 33-43. https://doi.org/10.11003/JPNT.2026.15.1.33
Received on Dec 14, 2025, Revised on Feb 10, 2026, Accepted on Mar 05, 2026, Published on Mar 15, 2026.
Copyright © The Institute of Positioning, Navigation, and Timing
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
This paper proposes a robust optimization framework for indoor Wi-Fi access point (AP) localization that combines multi-start initialization with explicit handling of missing directional measurements. Our previous study employed an environment-adaptive path-loss model with directional bias compensation and showed that unknown APs can be localized with reasonable accuracy even under limited measurement conditions. However, the suggested approach suffered from performance instability due to sensitivity to initial values and the presence of unreliable or missing heading information. To address these issues, the method proposed in this study (i) filters out invalid directional measurements when estimating the path-loss exponent and directional biases, (ii) performs AP-wise localization using two complementary initial positions derived from geometric and signal-strength heuristics, and (iii) jointly refines the locations and transmit powers of all unknown APs while keeping the global path-loss exponent and directional biases fixed. Experiments conducted on Wi-Fi RSSI data collected at 48 measurement points in a real indoor environment show that the proposed algorithm reduces the mean localization error by approximately 38.5%, from 3.23 m to 1.99 m, compared with the previous work. In particular, for AP_Y, which exhibited the largest localization error with the previous work, the error is reduced to less than half across a wide range of data-usage ratios. These results indicate that the proposed framework improves the stability and practical applicability of model-based indoor Wi-Fi localization with unknown AP positions.
indoor localization, Wi-Fi positioning, AP estimation, RSSI signal, multi-initialization optimization
실내 공간에서의 위치 인식 기술은 IoT, 스마트 홈, 자율주행 로봇, 물류 자동화, 재난 안전 등 다양한 응용 분야에서 필수적인 핵심 인프라로 부상하고 있다 (Roy & Chowdhury 2022). 그러나 Global Positioning System (GPS) 신호가 차단되는 실내 환경에서는 대체 신호원을 활용한 고정밀 위치 추정 기법이 필수적으로 요구된다. 이를 위해 Wi-Fi, 블루투스, 초광대역(UWB), 관성 측정 장치(IMU) 등 다양한 무선 기술 기반의 실내 위치 추정 기법이 활발히 연구되고 있다 (Leitch et al. 2023). 이 중 Wi-Fi Received Signal Strength Indicator (RSSI)를 이용하는 방법은 이미 광범위하게 구축된 네트워크 인프라와 스마트폰과 같은 범용 단말에서 추가 하드웨어 없이 구현 가능하다는 장점으로 인해 경제성과 실용성 측면에서 특히 주목받고 있다.
Wi-Fi 기반 실내 위치 추정 기술은 크게 지문(fingerprinting) 기반 방법과 모델 기반 방법으로 구분된다 (Ma & Shi 2023). 지문 기반 방법은 사전에 실내 공간의 다양한 위치에서 Wi-Fi 신호 특성을 수집하여 무선 지도(radio map)를 구성하고 실시간 측정값과의 유사도를 비교하여 위치를 추정한다 (Alexandrou et al. 2020). 이 방식은 복잡한 전파 환경을 데이터로 직접 모델링함으로써 높은 정확도를 달성할 수 있으나, 초기 무선 지도 구축에 많은 시간과 인력이 필요하고 환경 변화 시 지도를 주기적으로 재구축해야 하는 근본적인 한계가 있다 (Roy & Chowdhury 2022).
반면 모델 기반 방법은 전파의 물리적 특성을 수학적으로 모델링하여 신호 강도와 거리 간의 관계를 통해 위치를 추정한다. 대표적인 예로 경로손실(path-loss) 모델을 들 수 있으며 이는 거리 증가에 따라 신호가 로그 형태로 감쇠하는 특성을 표현한다. 모델 기반 접근법은 상대적으로 적은 사전 데이터와 높은 환경 적응성의 장점이 있지만, 많은 기존 연구가 모든 액세스 포인트(access point, AP)의 위치가 정확히 알려져 있다는 가정을 둔다는 한계가 있다 (Kwon & Cho 2021). 실제 환경에서는 일부 AP 위치가 알려지지 않은 경우가 많으며 이러한 불확실성은 전체 위치 추정 오차를 증가시키는 요인이 된다.
Park et al. (2025)에서는 이러한 문제를 완화하기 위해 환경 적응형 경로손실 모델과 방향성 편차 보정을 결합한 미지 AP 위치 추정 알고리즘을 제안한 바 있다. 해당 접근법은 제한된 데이터 환경에서도 일정 수준의 위치 추정 성능을 달성하였으나 초기값 설정에 대한 민감도와 방향 정보 결측치 및 이상치로 인한 불안정성이 여전히 존재하였다. 특히 방향 센서 오차나 측정 과정의 누락으로 인해 신뢰성이 낮은 방향 데이터가 포함될 경우, 경로손실 모델 추정에 왜곡이 발생하고 최종 위치 추정 오차가 증가하는 문제가 관찰되었다.
이 논문은 선행연구의 모델 기반 접근법을 토대로 하여 (1) 방향 정보가 결측되거나 비정상일 때 이를 명시적으로 배제하는 방향성 데이터 처리 절차, (2) 기하학적 중심과 신호 강도 기반의 두 가지 상호 보완적인 초기값을 활용하는 다중 초기값(multi-start) 위치 추정 전략, (3) 전역 경로손실 지수와 방향성 바이어스를 고정한(fixed) 상태에서 미지 AP의 위치와 송신 전력만을 집중적으로 최적화하는 공동 최적화(joint refinement) 기법을 제안한다. 이를 통해 기존 알고리즘이 갖던 초기값 의존성과 파라미터 동시 최적화에 따른 수렴 불안정 문제를 완화하고 데이터 사용 비율이 낮은 경우에도 안정적인 위치 추정 성능을 확보하고자 한다.
이 연구의 궁극적인 목표는 제한된 RSSI 측정 데이터만을 이용하여도 미지 AP 위치를 안정적으로 추정할 수 있는 모델 기반 프레임워크의 실용성을 입증하는 것이다. 실험에서 26 m × 23 m 공간의 48개 측정 지점에서 4방향(192개 측정) 데이터를 수집한 것은 데이터 사용 비율(10%, 30%, …, 100%)에 따른 성능 변화를 체계적으로 분석하기 위함이다. 이러한 대규모 데이터셋을 통해 제안 방법의 견고함과 데이터 효율성을 입증하며, 실제 환경에서 부분적으로 알려진 Wi-Fi 인프라를 자동으로 매핑하는 실용적 가능성을 보여준다. 이 논문의 구성은 다음과 같다. 2장에서는 선행연구 알고리즘의 구조와 한계를 정리하고 이를 개선하기 위한 제안 방법을 상세히 기술한다. 3장에서는 실제 실험 환경과 데이터셋을 설명하고 정성적 평가와 정량적 평가를 제시한다. 나아가 실제 실내 환경에서 수집한 Wi-Fi RSSI 데이터를 이용한 실험을 통해 제안 기법이 평균 위치 추정 오차 및 AP별 성능에서 기존 방법 대비 유의미한 개선을 달성함을 보인다. 마지막으로 4장에서는 이 연구의 결론과 한계를 논의하고 향후 연구 방향을 제시한다.
이번 장에서는 Park et al. (2025)에서 제안한 알고리즘과 이 논문에서 제시하는 알고리즘의 구조 및 성능 특성을 비교 분석하고자 한다. 이를 통해 선행연구가 가진 주요 문제점과 한계점을 구체적으로 정리하고, 이를 극복하기 위한 이 연구의 개선 방안과 세부 절차를 제시한다.
Wi-Fi 기반 위치 추정에서 RSSI는 거리뿐만 아니라 단말의 방향(heading angle)에 따라서도 감쇠 특성이 달라진다. 따라서 방향성 데이터를 적절히 처리하지 않으면 신호 모델 왜곡이 누적되어 위치 추정의 정확도에 악영향을 미칠 수 있다. Park et al. (2025)에서는 이러한 방향성 문제를 완화하기 위해 환경 적응형 경로손실 모델과 방향성 편차 보정을 결합한 공동 최적화 기법을 제안하였다. 이 방법은 제한된 데이터 환경에서도 일정 수준의 위치 추정 성능을 보였으나 실내 환경 특유의 노이즈와 데이터 불완전성으로 인해 다음과 같은 한계가 관찰되었다.
기존 접근법은 RSSI 측정 데이터에 포함된 방향 정보가 결측되거나 이상치인 경우, 해당 데이터를 검증 없이 기본 방향(0°)으로 간주하여 편차 보정에 포함하였다 (Algorithm 1). 이로 인해 측정 노이즈, 단말 방향 센서 오류, 환경 변화에 따른 방향 신뢰도 저하가 누적되어 전체 신호 모델의 왜곡이 심해지고 위치 추정의 정확도와 신뢰성이 모두 저하되는 문제가 나타났다 (Park et al. 2025).
| Algorithm 1 Direction-bias missing and outlier handling (Previous work) | |
|---|---|
| Require: Measurement data with RSSI and heading angles $\{(\text{RSSI}_i, \theta_i)\}_{i=1}^N$ | |
| Ensure: Bias-assigned measurement data $\{(\text{RSSI}_i, b_i)\}_{i=1}^N$ | |
| 1: | for each measurement $i$ do |
| 2: | Read the heading angle $\theta_i$ |
| 3: | if $\theta_i$ is missing or invalid then |
| 4: | Set $\theta_i \leftarrow 0^\circ$ (default direction) |
| 5: | end if |
| 6: | Map $\theta_i$ to a discrete index $h_i \in \{0, 1, 2, 3\}$ (mapping to $0^\circ, 90^\circ, 180^\circ, 270^\circ$) |
| 7: | $validDirMask_i \leftarrow (0 \le h_i < 4)$ |
| 8: | Initialize direction bias: $b_i \leftarrow 0$ |
| 9: | if $validDirMask_i = true$ then |
| 10: | Assign corresponding bias: $b_i \leftarrow bias\_table[h_i]$ |
| 11: | end if |
| 12: | end for |
경로손실 지수, 방향성 바이어스, 미지 AP 위치, 전송 전력 등을 동시에 최적화하는 과정에서 변수 간 상호 의존성이 높아지고 계산 복잡성이 크게 증가하였다. 선행연구의 이러한 공동 최적화 과정은 Algorithm 2에 기술되어 있다. 특히 데이터가 제한적이거나 측정 분포가 불균형한 경우 최적화 알고리즘의 비용 함수(cost function)가 불안정하게 진동하거나 조기 수렴 실패 및 과적합(overfitting) 현상이 빈번하게 관찰되었다 (Park et al. 2025).
| Algorithm 2 Joint Parameter Optimization (Previous work) | |
|---|---|
| 1: | Initialize $p = [P_{t,1}, \dots, P_{t,K}, n, b_{table}[0], \dots, b_{table}[3]]$ |
| 2: | function RESIDUALS($p$): |
| 3: | Extract parameters $P_t, n, b_{table} \leftarrow p$ |
| 4: | $P_{t\_vec} \leftarrow P_t[c]$ { $c$ is the AP index array } |
| 5: | $b\_vec \leftarrow \mathbf{0}$ |
| 6: | $b\_vec[validDirMask] \leftarrow b_{table}[h[validDirMask]]$ |
| 7: | $\text{RSSI}_{pred} \leftarrow P_{t\_vec} – 10n \log_{10}(d) + b\_vec$ { Eq. (1) model } |
| 8: | return $\text{RSSI}_{pred} – \text{RSSI}$ |
| 9: | Optimize $p$ using least_squares(RESIDUALS) |
초기 위치 추정값을 관측 데이터의 산술 평균(중앙값)으로만 설정하였기 때문에 데이터 분포가 비대칭이거나 부족한 환경에서는 최적화가 전역 최적해(global optimum)가 아닌 국소 최적해에 머무르는 경우가 잦았다 (Algorithm 3). 실제 위치 추정 오차도 제한적 데이터 사용(예: 30% 이하) 환경에서 다수의 AP에 대해 4 m 이상의 오차 발생과 함께 최적화가 안정적인 해를 찾지 못하는 등 성능 저하가 빈번히 발생했다. 이는 단일 초기값 방식이 알고리즘의 안정성을 보장하지 못하며 결과적으로 위치 추정의 신뢰도를 저하시키는 핵심 원인임을 보여주었다.
| Algorithm 3 Single initial value optimization for AP location (Previous work) | |
|---|---|
| Require: Measurements for one AP $\{(x_i, y_i, h_i, \text{RSSI}_i)\}_{i=1}^N$, fixed path-loss $n$, fixed bias table $b_{table}$, and observation weights $w_i$ | |
| Ensure: Estimated AP position $(x^*, y^*)$ and transmit power $P_t^*$ | |
| 1: | Initialize $(x^{(0)}, y^{(0)}, P_t^{(0)}) \leftarrow (\text{mean}(x_i), \text{mean}(y_i), \text{max}(\text{RSSI}_i) + 10)$ |
| 2: | function RESIDUALS($x, y, P_t$): |
| 3: | for each measurement $i \in \{1, \dots, N\}$ do |
| 4: | $d_i \leftarrow \sqrt{(x – x_i)^2 + (y – y_i)^2}$ |
| 5: | $\text{RSSI}_{pred,i} \leftarrow P_t – 10n \log_{10}(d_i) + b_{table}[h_i]$ {Eq. (1) model} |
| 6: | $e_i \leftarrow w_i \cdot (\text{RSSI}_{pred,i} – \text{RSSI}_i)$ |
| 7: | return residuals $e$ |
| 8: | Optimize $(x, y, P_t)$ using least_squares(RESIDUALS) starting from $(x^{(0)}, y^{(0)}, P_t^{(0)})$ |
이와 같은 문제들은 실내 위치 추정 알고리즘의 실제 활용 가능성을 제한하고 대규모 공간이나 동적 환경에서의 적용을 어렵게 한다. 이 연구는 이러한 한계들을 바탕으로 다중 초기값 기반 최적화 및 신호 방향성 결측, 왜곡 처리 등 개선된 방법론을 개발하고 실험을 통해 성능 향상을 체계적으로 입증한다.
앞서 2.1절에서 살펴본 바와 같이 기존 연구의 알고리즘은 (i) 단말 방향 정보가 누락되거나 이상치가 포함될 때 신호 모델의 신뢰성이 크게 저하되고, (ii) 초기값 설정에 따라 추정 결과가 크게 달라지는 초기값 민감도가 존재하며, (iii) 경로손실 지수, 방향성 바이어스, AP 위치 등 여러 파라미터를 동시에 추정하는 구조로 인해 수렴이 불안정해지는 한계를 가진다. 이러한 문제를 해결하기 위해 이 연구에서는 방향성 보정을 포함한 경로손실 기반 접근법은 유지하되 다음의 세 가지 개선 방안을 제안한다.
첫째, 단말 방향 정보의 결측값 및 이상치를 제거하는 방향 전처리 단계를 도입하여 신뢰할 수 있는 방향 데이터만이 모델 보정에 활용되도록 하였다.
둘째, 미지 AP별 다중 초기값 기반 위치 추정 전략을 적용하였다. 전체 측정 좌표의 평균과 RSSI 상위 K개(이 연구에서는 K=6) 측정지점의 평균이라는 두 개의 상이한 초기값을 사용함으로써 초기화 민감도를 완화하고, 비용 함수가 여러 개의 국소 최적해를 가질 때 전역 최적해에 수렴할 가능성을 높였다.
셋째, 경로손실 지수 $n$과 방향성 바이어스 $b_{\theta}$를 사전에 추정하여 고정한 상태에서 모든 미지 AP의 위치 (x, y)와 송신 세기 $P_t$를 동시에 최적화하는 공동 최적화 단계를 도입하였다. 이를 통해 최적화해야 할 변수의 수를 줄여 수렴 안정성을 높이고, 전체 RSSI 잔차 오차를 최소화하는 전역적으로 일관된 해를 얻을 수 있었다.
제안된 알고리즘의 전체 흐름은 Fig. 1에 요약되어 있으며 RSSI 데이터 수집, 방향 전처리, 경로손실 모델 보정, 다중 초기값 기반 AP 위치 추정, 파라미터 고정 후 공동 최적화, 최종 오차 평가의 순서로 구성된다.
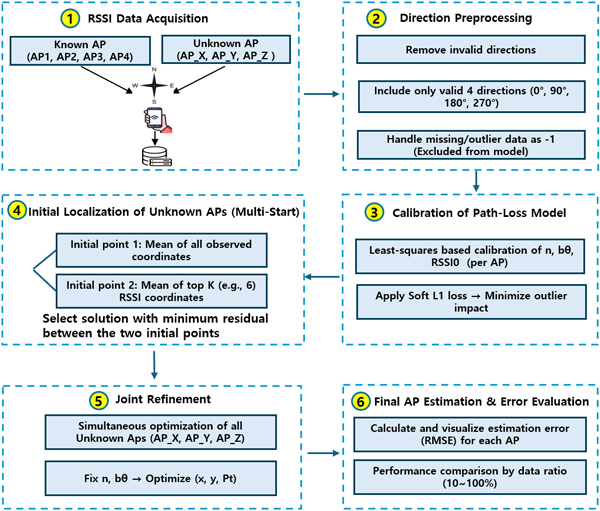
Fig. 1. Overall procedure of the proposed RSSI-based unknown AP localization algorithm.
이 연구에서 사용하는 기본 신호 모델은 단말의 방향 $\theta$가 RSSI에 영향을 미친다는 점을 반영한 로그 기반 경로손실 모델이며 거리 $d$에 따른 감쇠뿐 아니라 단말 방향(0°, 90°, 180°, 270°)에 따른 방향성 바이어스 $b_{\theta}$를 포함함으로써 실내 환경의 비등방성(anisotropy)을 보다 정확하게 표현한다. 해당 모델식은 Eq. (1)과 같다.
$$RSSI(d, \theta) = P_{t} – 10n \cdot \log_{10}(d) + b_{\theta} + \epsilon$$
여기서 $\theta$는 스마트폰 사용자의 진행 방향과 단말–AP간 시선 방향(line-of-sight) 사이의 상대적인 방위각(relative azimuth)이다. $\theta$ =0°는 사용자가 AP를 정면으로 바라보는 경우, $\theta$ =180°는 AP를 등지고 있는 경우를 나타내며 $\theta$ =90°와 $\theta$ =270°는 각각 AP가 사용자의 좌측, 우측에 위치한 경우를 의미한다. $b_{\theta}$는 사용자의 몸과 단말 방향에 의해 발생하는 RSSI의 비등방성을 보정하기 위한 방향 의존적인 편차 항으로 특정 $\theta$에서의 평균적인 RSSI 오차를 흡수하는 역할을 한다. RSSI의 단위가 dBm이므로 $b_{\theta}$의 단위 역시 dB로 정의된다. 여기서 RSSI ($d,\theta$)는 거리 $d$와 방향 $\theta$에서의 RSSI (dBm)를 나타내며 $P_t$는 기준 거리(1 m)에서의 송신 전력(transmit power), $n$은 신호 감쇠 정도를 나타내는 경로손실 지수(path-loss exponent), $b_{\theta}$는 단말의 방향(0°, 90°, 180°, 270°)에 따른 방향 보정 바이어스(direction bias), ε는 환경 노이즈(environmental noise)를 의미한다. 이 식은 Wi-Fi RSSI가 거리 및 단말 방향에 따라 로그 형태로 감쇠하는 물리적 특성을 표현한 것으로, 이후 절에서 제시하는 방향별 결측값 처리 및 편차 보상 강화 (2.2.1절), 다중 초기값 기반 미지 AP 위치 최적화 (2.2.2절), 경로손실 지수 및 방향 바이어스 고정 후 공동 최적화 수행 (2.2.3절)의 핵심 기반 모델로 사용된다.
선행연구에서는 RSSI 측정 데이터의 방향 정보가 0°, 90°, 180°, 270° 이외의 값이거나 결측인 경우에도 별도의 검증 없이 이를 0° 방향으로 간주하여 방향성 바이어스 산정에 포함하였다. 이러한 처리 방식은 데이터 노이즈, 단말 방향 센서 오류, 환경 변화 등에 취약하여 잘못된 신호 모델 추정과 위치 오차 확대의 원인이 되었다.
이 연구에서는 이러한 문제를 해소하기 위해, 유효하지 않은 방향 데이터에는 특별한 값(−1)을 부여하고 해당 샘플을 방향 바이어스 추정 단계에서 제외하는 필터링 절차를 도입하였다. 즉, 관측 방향이 {0°, 90°, 180°, 270°} 집합에 속하지 않거나 누락된 경우에는 “invalid 방향”으로 간주하여 편차 보상에 사용하지 않는다. 이를 통해 신뢰도가 낮은 데이터를 사전에 제거함으로써 방향성 바이어스 추정의 왜곡을 줄이고 전체 위치 추정 정확도를 향상시켰다. 또한, 남은 유효한 방향 데이터만을 활용하여 경로손실 지수 $n$과 방향별 보정항 $b_θ$를 동시에 추정하였다. 이 과정은 측정된 RSSI 값과 모델 예측값 간의 오차 제곱합을 최소화하는 최소제곱(least-squares) 기반 최적화 문제로 정식화된다.
Eq. (2)는 측정된 RSSI 값과 경로손실 모델의 예측값 간 차이를 최소화하여 경로손실 지수 $n$과 방향별 보정항 $b_θ$를 동시에 추정하는 목적함수로 사용된다.
$$\min_{n, b_{\theta}} \sum_{i=1}^{N} (RSSI_{i} – (P_{t} – 10n \cdot \log_{10}(d_{i}) + b_{\theta_{i}}))^{2}$$
여기서 $RSSI_i$는 $i$번째 측정 지점에서의 수신 신호 세기(dBm), $P_t$는 기준 거리 1 m에서의 송신 전력, $d_i$는 $i$번째 측정 지점과 AP 간의 거리(m), $b_{\theta_i}$는 단말의 방향(0°, 90°, 180°, 270°)에 따른 보정 바이어스, $n$은 신호 감쇠 정도를 나타내는 경로손실 지수이다. 손실 함수에는 각 측정에 대해 $b_{\theta_i}$가 사용되지만, 실제로 추정되는 파라미터는 $\{b_{0°}, b_{90°}, b_{180°}, b_{270°}\}$ 네 개이며, 각 측정치는 자신의 방향 라벨 $\theta_i$에 따라 이들 중 하나를 선택해 사용한다. 즉, 방향 보정항은 네 개의 이산 방향 {0°, 90°, 180°, 270°}에 대해 구간별 상수(piecewise constant)로 모델링되며, 동일한 방향에서 수집된 모든 측정치는 동일한 보정값 $b_{\theta}$를 공유한다.
이 연구에서는 방향 정보가 유효하지 않거나 결측된 데이터(invalid $\theta$)를 제외한 신뢰성 높은 데이터만으로 위 식을 최소화하여 환경 잡음의 영향을 완화하고 안정적인 파라미터 추정을 수행하였다. 또한, 과적합을 방지하고 수렴 안정성을 확보하기 위해 약한 정규화(weak prior)를 부여하였다. 방향성 데이터 필터링 및 편차 보상의 전체 절차는 Algorithm 4에 요약되어 있다.
| Algorithm 4 Directional missing value handling and bias compensation (Proposed method) | |
|---|---|
| Require: Measurement data with RSSI and heading angles $\{(\text{RSSI}_i, \theta_i)\}_{i=1}^N$ | |
| Ensure: Bias-assigned measurement data $\{(\text{RSSI}_i, b_i)\}_{i=1}^N$ | |
| 1: | for each measurement $i \in \{1, \dots, N\}$ do |
| 2: | if $\theta_i$ is missing or $\theta_i \notin \{0^\circ, 90^\circ, 180^\circ, 270^\circ\}$ then |
| 3: | $h_i \leftarrow -1$ {Assign invalid index to exclude from bias} |
| 4: | else |
| 5: | Map $\theta_i$ to a discrete index $h_i \in \{0, 1, 2, 3\}$ |
| 6: | end if |
| 7: | if $h_i = -1$ then |
| 8: | $b_i \leftarrow 0$ {Apply zero bias (no compensation)} |
| 9: | else |
| 10: | $b_i \leftarrow b_{table}[h_i]$ |
| 11: | end if |
| 12: | end for |
기존 방식에서 미지 AP 위치 추정은 관측 지점들의 산술 평균 좌표를 단일 초기값으로 사용하는 비선형 최적화 문제로 구성되었다. 그러나 신호 분포가 비대칭이거나 데이터가 제한적인 경우, 이러한 단일 초기값 방식은 비용 함수가 다수의 국소 최적해를 가질 때 전역 최적해에 도달하지 못하고 국소 최적해에 수렴할 가능성이 크다.
이를 개선하기 위해 이 연구에서는 특성이 다른 두 개의 초기값을 사용하는 다중 초기값 기반 최적화 절차를 도입한다. 첫 번째 초기값은 모든 관측 지점의 기하학적 중심(산술 평균 좌표)이고, 두 번째 초기값은 RSSI가 가장 강한 상위 𝐾개(이 연구에서는 𝐾=6) 지점의 평균 좌표이다. 두 번째 초기값은 “신호 세기가 강할수록 AP와의 거리가 짧다”는 물리적 특성을 이용한 휴리스틱으로, 최적화 탐색을 실제 AP 위치에 근접한 영역에서 시작하게 하여 전역 최적해에 수렴할 확률을 높인다. 각 초기값에 대해 독립적인 비선형 최소제곱 최적화를 수행한 뒤 잔차(residual error)의 제곱합이 더 작은 결과를 해당 AP의 최종 위치 추정값으로 선택한다. 이러한 다중 초기값 전략은 데이터 사용 비율이 낮거나 신호 분포가 불규칙한 환경에서도 국소 최적해에 머무르는 문제를 완화하고 전체적인 위치 추정 정확도와 재현성을 향상시키는 효과가 있다. 이 절차의 전체 흐름은 Algorithm 5에 요약되어 있다.
| Algorithm 5 Multi-initialization based unknown AP position estimation (Proposed method) | |
|---|---|
| 1: | Initialize candidate positions: |
| 2: | $x_0^{(1)} \leftarrow$ mean coordinates of all measurement points |
| 3: | $x_0^{(2)} \leftarrow$ mean coordinates of top 6 highest RSSI measurement points |
| 4: | for each initial $x_0^{(i)}$ do |
| 5: | Perform nonlinear least-squares optimization minimizing RSSI residuals |
| 6: | end for |
| 7: | Select the result with minimal cost as the final AP position estimate |
| 8: | Return estimated location $(x,y)$ and transmit power $P_t$ |
선행연구의 공동 최적화 과정에서 경로손실 지수 $n$, 방향별 바이어스 $b_{dir}$, 미지 AP 위치 및 송신 전력을 동시에 추정하였다. 그러나 이러한 방식은 파라미터 간 상관성이 높아 최적화 차원이 커지고, 이로 인해 계산 복잡도 증가, 수렴 불안정, 국소 최적해에 머무를 가능성 증가 등의 문제가 발생하였다. 이 연구는 경로손실 지수 $n$과 방향 바이어스 $b_{\theta}$를 사전에 추정하여 고정한 뒤, 미지 AP 위치 ($x_j$, $y_j$)와 송신 전력 $P_{t,j}$만을 대상으로 공동 최적화을 수행하였다. 이와 같이 최적화 변수의 수를 줄임으로써 연산 비용과 수렴 속도를 개선하고, 최종 위치 추정의 신뢰도와 일관성을 향상시켰다.
Eq. (3)은 경로손실 지수 $n$과 방향 바이어스 $b_{\theta}$를 고정한 상태에서 모든 미지 $AP_j$에 대한 위치 ($x_j$, $y_j$)와 송신 전력 $P_{t,j}$을 동시에 추정하는 공동 최적화 최소제곱 문제를 나타낸다.
$$\min_{x_{j}, y_{j}, P_{t,j}} \sum_{j=1}^{M} \sum_{i=1}^{N_{j}} (RSSI_{i,j} – (P_{t,j} – 10n \cdot \log_{10}(d_{i,j}) + b_{\theta_{i,j}}))^{2}$$
여기서 $RSSI_{i,j}$는 $j$번째 AP에 대해 $i$번째 측정 위치에서 관측된 신호 세기(dBm), $d_{i,j}$는 해당 측정 위치와 AP 간의 거리(m), $P_{t,j}$는 $j$번째 AP의 기준 송신 전력, $b_{\theta_{i,j}}$는 방향 $\theta_{i,j}$에 따른 보정 바이어스를 의미한다. M은 스캔된 RSSI 데이터에서 관측된 고유 MAC 주소 중 위치가 알려지지 않은 AP의 개수로, 알려진 AP(AP1~AP4)를 제외한 나머지 고유 AP들(실험에서는 AP_X, AP_Y, AP_Z로 M=3)이 자동으로 결정된다. 미지의 $AP_j$에 대한 송신전력 $P_{t,j}$ 역시 최적화 변수로 포함된다. 이는 각 AP의 실제 송신전력이 사전에 알려져 있지 않고, 장비 종류나 시간에 따라 달라질 수 있기 때문이다. AP의 위치 ($x_j$, $y_j$)와 송신전력 $P_{t,j}$를 함께 최적화하면, 모든 AP에 대해 동일한 송신전력을 가정하거나 별도의 보정을 수행하지 않고도 측정된 RSSI 값에 보다 잘 맞는 경로손실 모델을 얻을 수 있다.
이 식은 각 AP의 신호 모델과 측정값 간 오차 제곱합을 최소화하는 형태로 구성되어 있으며 모든 미지 AP의 위치 파라미터를 동시에 최적화함으로써 변수 간 상호의존성을 반영한 일관된 해를 도출한다. 또한, $n$과 $b_{\theta}$를 사전에 고정함으로써 최적화 변수의 수를 줄여 계산 복잡도 감소, 수렴 안정성 향상, 최종 위치 정확도 개선을 동시에 달성하였다.
이 논문에서 제안하는 실내 미지 AP 위치 추정 알고리즘의 성능을 평가하기 위해 실제 환경에서 실험을 수행하였다. 이번 장에서는 선행연구에서 제시된 기준 알고리즘(previous work)과 이 연구에서 개선한 알고리즘을 대상으로 정성적 평가와 정량적 평가를 통해 성능을 비교 분석하였다.
실험은 한국전자통신연구원(ETRI) 7동의 4층 401호, 26 m × 23 m 규모의 실내 공간에서 수행되었다. 측정 단말로는 삼성 갤럭시 S20+ (SM-N981N)을 사용하여 각 측정 지점에서 SSID, BSSID 그리고 RSSI를 수집하였으며, 수집된 데이터는 JSON 형식으로 서버에 전송되어 분석에 활용되었다.
총 48개의 측정 지점이 Fig. 2와 같이 실험 공간 내에 균등하게 배치되었으며, 각 지점마다 4개 방향(0°, 90°, 180°, 270°)에서 10회씩 스캔하여 한 지점당 총 40회의 RSSI 측정값을 확보하였다. 따라서 전체 데이터셋은 26 m × 23 m 공간에서 수집된 총 1,920개의 방향별 RSSI 측정으로 구성된다. 이러한 대규모 데이터셋을 바탕으로 데이터 사용 비율에 따른 성능을 정량적으로 평가하여 제안 방법의 데이터 효율성과 일반화 능력을 검증하였다. 7개 AP 중 4개(AP1~AP4)는 위치가 알려져 있어 경로손실 파라미터 추정에 활용되었고, 나머지 3개(AP_X, AP_Y, AP_Z)는 미지 AP로서 위치 추정 대상이다. 기준 AP 4개의 RSSI를 이용하여 미지 AP 3개의 위치를 추정하였으며, 각 AP에 대해서는 실제 설치 위치(ground truth)를 별도로 기록하여 위치 추정 오차를 계산하였다.
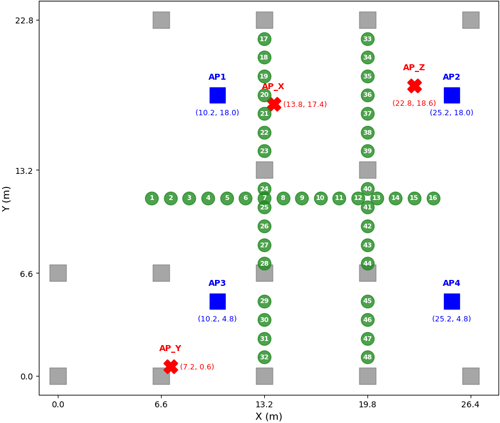
Fig. 2. AP layout and measurement points (meters).
정성적 평가는 AP 위치 추정 결과를 평면 상에 시각화하여 실제 AP 위치와의 상대적인 위치 관계를 비교하는 방식으로 수행하였다. Figs. 3-8은 데이터 사용 비율을 10%에서 100%까지 변화시키면서 선행연구와 제안 알고리즘의 추정 위치를 동일한 좌표계 상에 함께 나타낸 결과를 보여준다. 데이터 사용 비율이 10%로 매우 제한적인 상황에서도 제안 알고리즘은 미지 AP가 존재하는 공간의 대략적인 위치 영역을 비교적 정확하게 포착하는 반면, 선행연구의 경우 일부 미지 AP의 추정 위치가 실제 위치로부터 크게 이탈하는 사례가 관찰된다. 데이터 사용 비율이 증가함에 따라 두 방법 모두 성능이 향상되지만, 제안 알고리즘은 전 구간에서 보다 실제 위치에 가깝게 수렴하는 양상을 보이며 특히 AP_Y, AP_Z와 같이 기존 방법에서 오차가 크게 나타난 AP들에 대해서도 안정적인 추정 결과를 제공한다. 특히 AP_Z의 경우, 선행연구에서는 실내 공간 경계 근처에서 추정 위치가 크게 치우치는 경향이 있었던 반면, 제안 알고리즘은 경계 근처의 왜곡이 현저히 감소하여 보다 신뢰도 높은 추정 결과를 제공하였다.
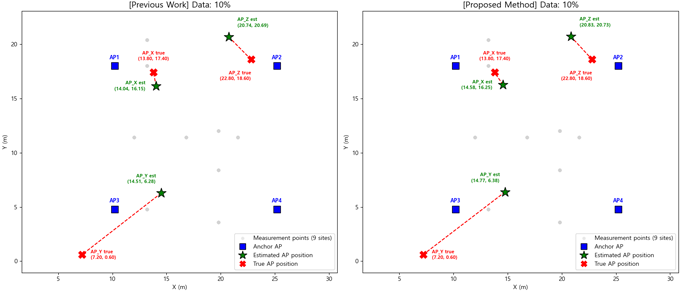
Fig. 3. Comparison of unknown AP localization results between the previous work and the proposed method (data usage: 10%).
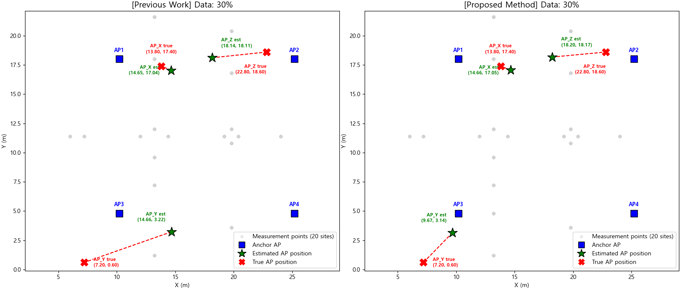
Fig. 4. Comparison of unknown AP localization results between the previous work and the proposed method (data usage: 30%).
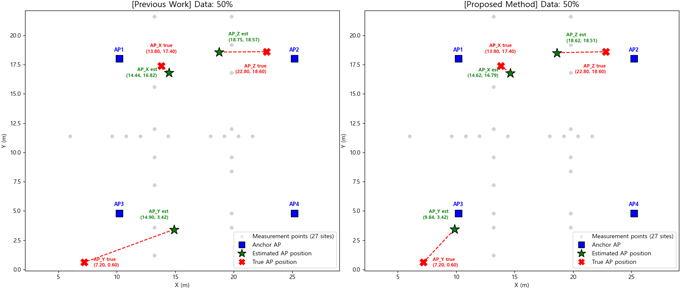
Fig. 5. Comparison of unknown AP localization results between the previous work and the proposed method (data usage: 50%).
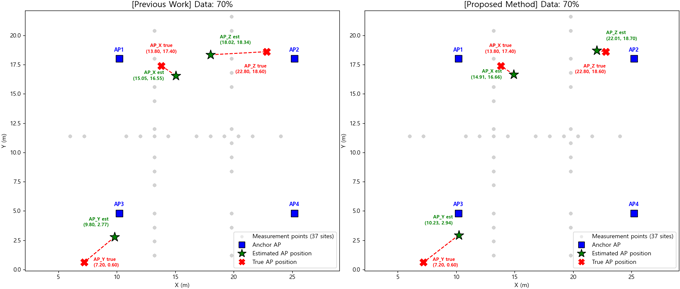
Fig. 6. Comparison of unknown AP localization results between the previous work and the proposed method (data usage: 70%).
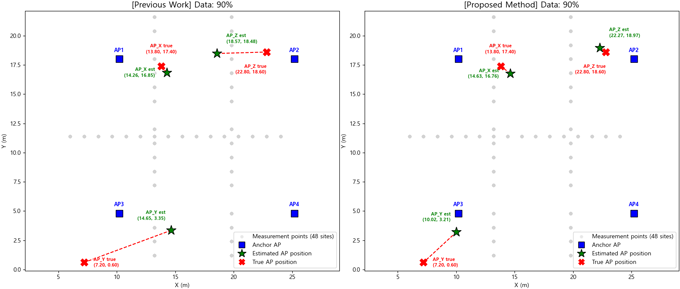
Fig. 7. Comparison of unknown AP localization results between the previous work and the proposed method (data usage: 90%).
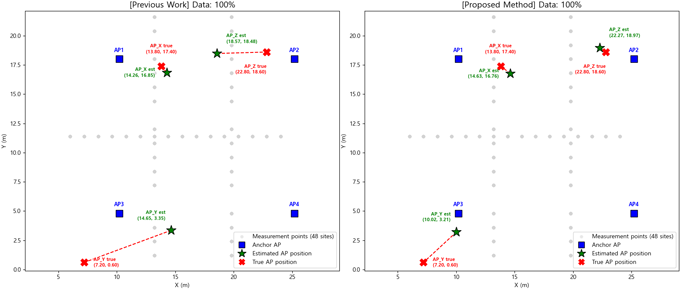
Fig. 8. Comparison of unknown AP localization results between the previous work and the proposed method (data usage: 100%).
이러한 정성적 분석 결과는 방향성 편차에 대한 결측값 처리 강화와 다중 초기값 기반 최적화, 그리고 파라미터 고정 후 공동 최적화 절차가 기존 방법의 방향성 왜곡 및 초기값 민감도 문제를 효과적으로 완화했음을 보여준다. 또한, 제한된 데이터 환경에서도 제안 알고리즘이 견고하고 일관된 미지 AP 위치 추정 성능을 제공할 수 있음을 뒷받침한다.
정량적 평가는 데이터 사용 비율을 10%에서 100%까지 단계적으로 변화시키면서 선행연구 알고리즘과 이 제안 알고리즘의 위치 추정 정확도를 비교하는 방식으로 수행하였다. 데이터 사용 비율은 전체 48개 측정 지점 중 일부를 그룹 단위로 샘플링하여 사용한 비율을 의미하며, 위치 오차는 추정된 AP 위치와 실제 위치 간의 유클리드 거리 (Euclidean distance)의 평균값으로 정의하였다.
Tables 1과 2는 각각 선행연구와 제안 알고리즘의 데이터 사용 비율에 따른 AP별 위치 추정 오차와 평균 오차를 상세히 보여준다. 10% 데이터 사용 시 선행연구의 평균 오차는 4.489 m, 제안 알고리즘의 평균 오차는 4.603 m로 두 방법 간 차이가 크지 않았다. 그러나 데이터 사용 비율이 30%로 증가하면 선행연구의 평균 오차는 4.506 m로 거의 변화가 없는 반면, 제안 알고리즘은 3.032 m로 오차가 대폭 감소하여 의미 있는 성능 향상을 보였다 (Fig. 9). 50% 데이터 사용 시에도 선행연구는 4.372 m의 평균 오차를 기록한 반면, 제안 알고리즘은 3.024 m로 지속적으로 더 낮은 오차를 유지하였다. 특히 70% 이상의 데이터가 사용된 조건에서는 두 방법 간 성능 격차가 더욱 두드러졌다. 70% 사용 시 선행연구의 평균 오차는 3.226 m 수준이었으나, 제안 알고리즘은 1.985 m까지 감소하여 기존 대비 약 38.5%의 오차 감소를 달성하였다. 데이터 비율이 90% 및 100%에 이르렀을 때에도 선행연구의 평균 오차는 약 4.3 m 수준에 머문 반면, 제안 알고리즘은 1.847 m로 안정적으로 낮은 위치 오차를 유지하였다.
Table 1. Localization error per AP by data usage ratio – previous work.
| Data (%) | AP_X | AP_Y | AP_Z | Average |
|---|---|---|---|---|
| 10 | 1.276 | 9.254 | 2.938 | 4.489 |
| 30 | 0.922 | 7.908 | 4.687 | 4.506 |
| 50 | 0.863 | 8.199 | 4.053 | 4.372 |
| 70 | 1.507 | 3.388 | 4.784 | 3.226 |
| 90 | 0.722 | 7.943 | 4.230 | 4.298 |
| 100 | 0.722 | 7.943 | 4.230 | 4.298 |
Table 2. Localization error per AP by data usage ratio – proposed method.
| Data (%) | AP_X | AP_Y | AP_Z | Average |
|---|---|---|---|---|
| 10 | 1.388 | 9.524 | 2.898 | 4.603 |
| 30 | 0.927 | 3.545 | 4.623 | 3.032 |
| 50 | 1.029 | 3.864 | 4.180 | 3.024 |
| 70 | 1.338 | 3.826 | 0.791 | 1.985 |
| 90 | 1.051 | 3.844 | 0.646 | 1.847 |
| 100 | 1.051 | 3.844 | 0.646 | 1.847 |
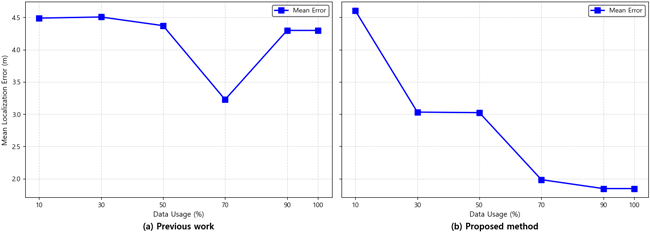
Fig. 9. Comparison of average localization error between the previous work and the proposed method across different data usage levels.
AP별 성능을 개별적으로 비교한 결과, AP_Y에서 특히 큰 개선 효과가 관찰되었다 (Fig. 10). 데이터 사용 비율 30%~100% 구간에서 선행연구의 AP_Y 오차는 일부 구간(70%)을 제외하고 약 8 m 수준으로 높게 나타난 반면, 제안 알고리즘은 동일 구간에서 3.5~3.8 m 범위로 낮고 안정적인 오차를 유지하며 기존 대비 오차가 절반 이하로 줄어들었다. AP_X와 AP_Z 또한 모든 데이터 사용 조건에서 제안 알고리즘이 선행연구보다 낮거나 유사한 오차를 기록하여 제안 방법이 전반적으로 더 안정적인 성능을 보임을 확인하였다.
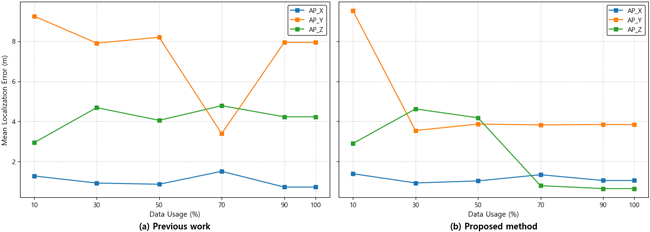
Fig. 10. Comparison of per-AP localization error between the previous work and the proposed method to evaluate the error distribution across access points.
Fig. 10에서 알 수 있듯이, y축 방향의 위치 추정 오차가 x축 대비 상대적으로 크게 나타나는 경향이 있다. 이는 실험 환경 내 측정 지점과 AP들이 주로 x축을 따라 배치되어 해당 방향으로는 강한 기하학적 제약을 제공하는 반면, y축 방향으로는 공간적 변화가 제한되어 측위 기하학적 배치(Geometric Dilution of Precision, GDOP)가 불리해짐에 따라 RSSI 노이즈에 대한 민감도가 높아졌기 때문으로 분석된다. 추가 실험으로, 경로손실 모델의 핵심 파라미터인 경로손실 지수 $n$이 위치추정 정확도에 미치는 영향을 분석하였다. Fig. 11은 $n$ 값을 1.9에서 3.1까지 변화시키며 평균 위치추정 오차를 계산한 결과를 나타낸다. 실험 결과, $n \approx 2.7$ 부근에서 평균 오차가 약 1.8 m로 최소가 되었으며, $n$ 값이 이보다 작거나 클수록 오차가 점진적으로 증가하는 경향을 보였다. 특히 $n = 2.8∼3.0$ 구간에서는 급격히 증가하는 양상이 나타났는데, 이는 모델의 과적합 또는 관측 기하의 불안정성에 기인한 것으로 판단된다. 이러한 결과는 $n$의 추정 정확도가 전체 모델 성능을 좌우하는 중요한 요인임을 보여주며, 실제 환경 적용 시 사전 보정 또는 적응형 갱신(adaptive update) 전략이 필요함을 시사한다.
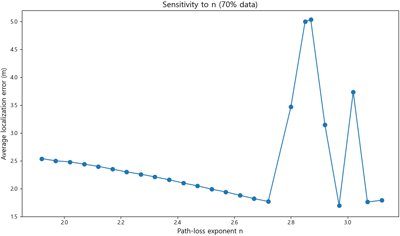
Fig. 11. Sensitivity of average localization error to path-loss exponent n (70% data).
이 논문에서는 선행연구의 구조적 한계인 방향 정보 결측, 단일 초기값 의존성, 다수 파라미터 동시 최적화에 따른 수렴 불안정성을 체계적으로 분석하였다. 이를 극복하기 위해 (i) 방향성 결측치의 정제 및 배제, (ii) 다중 초기값에 기반한 미지 AP 위치 최적화, (iii) 경로손실 지수와 방향 바이어스를 고정한 후 AP 위치와 송신 전력을 공동 최적화하는 단계적 최적화 방안을 제안하였다. 실험 결과, 데이터 사용 비율이 70% 이상인 조건에서 평균 위치 오차는 기존 대비 약 38.5% 감소하였으며, 특히 선행연구에서 약 7~9 m의 큰 오차를 보였던 AP_Y의 경우 오차가 절반 이하 수준으로 낮아지며 실제 위치에 안정적으로 수렴하였다. 이러한 성능 향상은 단순히 수치적 개선을 넘어, 제안 기법이 방향 정보 왜곡과 초기값 민감도 문제를 효과적으로 완화하여 실제 AP 인프라 배치를 보다 정확히 복원할 수 있음을 시사한다. 특히 비대칭적인 신호 분포 환경에서도 AP가 위치한 공간 영역의 대략적인 범위를 안정적으로 파악하고 극단값으로 인한 수렴 실패를 방지한다는 점에서 실질적인 활용 가능성이 크다.
그러나 이 알고리즘이 사용하는 비선형 최소제곱법은 비용 함수의 지형이 복잡할 경우 실제 AP 위치가 아닌 잘못된 국소 최적해에 수렴할 가능성이 여전히 존재한다. 데이터 사용 비율이 10%로 매우 낮은 경우, 제안 방법의 평균 오차는 4.603 m로 선행연구(4.489 m)와 유사하게 나타났다. 이는 측정 데이터가 부족할 때 비용 함수의 표면이 평탄해져 알고리즘이 실제 위치가 아닌 잔차가 유사한 잘못된 지점에서 수렴할 가능성을 시사한다. 실험 결과에서 y축 방향 오차가 x축보다 크게 나타난 것은 측정 지점의 선형적 분포로 인해 특정 방향의 기하학적 제약이 약해졌기 때문이다. 이러한 환경에서는 해의 유일성이 보장되지 않아 실제 위치와 대칭되는 지점이나 신호 세기가 유사한 엉뚱한 영역을 AP 위치로 오판할 위험이 있다. 이 연구에서 도입한 두 가지 초기값(기하학적 중심, 신호 상위 K개 평균) 전략은 국소 최적해 문제를 완화하지만, 만약 두 초기값 모두가 전역 최적해의 수렴 영역 밖에 위치한다면 여전히 잘못된 해를 도출할 수 있다. 이러한 분석은 제안 알고리즘이 기존 모델보다 견고하지만, RSSI 노이즈가 극심하거나 측정 지점의 기하학적 배치가 불량한 환경에서는 여전히 잘못된 위치를 찾을 가능성이 있음을 시사한다.
이 논문에서는 Wi-Fi 기반 미지 AP 위치 추정 시 발생하는 방향 정보 결측, 단일 초기값 의존성, 파라미터 동시 최적화에 따른 수렴 불안정성 문제를 체계적으로 분석하였다. 이를 해결하기 위해 방향성 데이터 필터링, 다중 시작 초기화 기반 최적화, 그리고 파라미터 고정 기반의 단계적 공동 최적화 방안을 제안하였다.
실제 실내 환경(ETRI 7동)에서 수행한 실험 결과, 제안 방법은 데이터 사용 비율 70% 이상 조건에서 평균 위치 오차를 기존 3.23 m에서 1.99 m로 약 38.5% 감소시켰다. 특히 신호 분포가 불규칙하여 기존에 큰 오차가 발생했던 AP들에 대해서도 오차를 절반 이하로 낮추며 안정적인 수렴 특성을 보였다. 정성적 평가에서도 제안 기법은 방향성 왜곡과 초기값 민감도 문제를 효과적으로 완화하여 실제 AP 위치 분포를 보다 정확하게 포착함을 확인하였다.
비록 이 연구가 특정 테스트베드에 국한되었다는 점과 데이터 희소 환경에서의 국소 최적해 수렴 위험이라는 이론적 한계가 있으나, 제안된 프레임워크는 제한된 RSSI 데이터만으로도 실내 Wi-Fi 인프라를 자동으로 매핑할 수 있는 실용적인 기술적 토대를 마련하였다. 향후 연구에서는 이러한 해의 모호성 문제를 해결하기 위해 전역 최적화 알고리즘과의 결합을 시도할 예정이다. 아울러 실내 지도 정보나 사용자의 이동성 모델과 같은 추가적인 물리적 제약 조건을 융합하여 수학적 최적화 과정에서 발생할 수 있는 비현실적인 추정 결과를 배제하고 위치 추정의 신뢰도를 한층 보강할 계획이다.
이 논문은 2025년 정부(국토부)의 국토교통과학 재원으로 국토교통과학기술진흥원의 지원을 받아 수행된 연구 결과임 (RS-2022-00141819, 초정밀 디지털 국토정보 획득을 위한 절대, 상대, 연속복합 측위 고도화 기술 개발).
Conceptualization, H. S. Park.; methodology, H. S. Park.; software, H. S. Park.; validation, H. S. Park.; formal analysis, H. S. Park.; investigation, H. S. Park.; resources, J. J. Yoo.; data curation, H. S. Park.; writing—original draft preparation, H. S. Park.; writing—review and editing, J. J. Yoo and S. Y. Cho.; visualization, H. S. Park.; supervision, J. J. Yoo.; project administration, J. J. Yoo.; funding acquisition, J. J. Yoo.
The authors declare no conflict of interest.
Alexandrou, R., Papadopoulos, H., & Konstantinidis, A. 2020, Indoor Localization with Multi-objective Selection of Radiomap Models, Artificial Intelligence Applications and Innovations: AIAI 2020, 583, 267-278. https://doi.org/10.1007/978-3-030-49161-1_23
Kwon, J. U. & Cho, S. Y. 2021, DNN-based LTE Signal Propagation Modelling for Positioning Fingerprint DB Generation, Journal of Positioning, Navigation, and Timing, 10, 55-66. https://doi.org/10.11003/JPNT.2021.10.1.55
Leitch, S. G., Ahmed, Q. Z., Abbas, W. B., Hafeez, M., Lazaridis, P. I., et al. 2023, On Indoor Localization Using WiFi, BLE, UWB, and IMU Technologies, Sensors, 23, 8598. https://doi.org/10.3390/s23208598
Ma, Z. & Shi, K. 2023, Few-Shot Learning for WiFi Fingerprinting Indoor Positioning, Sensors, 23, 8458. https://doi.org/10.3390/s23208458
Park, H., Lee, Y., & Yoo, J. 2025, Indoor Localization of Unknown Wi-Fi Access Points with Directional Bias Compensation, in Proc. 2025 International Conference on Information and Communication Technology Convergence (ICTC), IEEE, Daejeon, Republic of Korea, pp.1742–1747. https://ieeexplore.ieee.org/document/10756781
Roy, P. & Chowdhury, C. 2022, A survey on ubiquitous WiFi-based indoor localization system for smartphone users from implementation perspectives, CCF Transactions on Pervasive Computing and Interaction, 4, 299-318. https://doi.org/10.1007/s42486-022-00089-3