Jisung Oh![]() , Sungik Kim
, Sungik Kim![]() , Byungwoon Park†
, Byungwoon Park†![]()
Department of Aerospace Engineering and Convergence Engineering for Intelligent Drone, Sejong University, Seoul 05006, Korea
†Corresponding Author: Byungwoon Park, E-mail: byungwoon@sejong.ac.kr
Citation: Oh, J., Kim, S., & Park, B. 2026, Analysis of Earth GNSS Signal Availability and Positioning Performance in Lunar Orbit, Journal of Positioning, Navigation, and Timing, 15, 75-91.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2026 March, Volume 15, Issue 1, pages 75-91. https://doi.org/10.11003/JPNT.2026.15.1.75
Received on Jan 20, 2026, Revised on Feb 26, 2026, Accepted on Mar 08, 2026, Published on Mar 15, 2026.
Copyright © The Institute of Positioning, Navigation, and Timing
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Growing interest in space exploration in recent years has led to active research on lunar missions as the first step toward deep space exploration. Lunar exploration requires a variety of enabling technologies, among which establishing a reliable Position, Navigation and Timing (PNT) system on the Moon has gained increasing attention. Lunar missions traditionally have relied on one-to-one tracking from Earth-based ground stations. However, with the rapidly increasing number of lunar exploration missions, deep space communication networks such as the Deep Space Network (DSN) have become saturated. As an alternative, the use of Earth-based Global Navigation Satellite System (GNSS) signals, which are capable of supporting an unlimited number of users, has been proposed for lunar navigation, and extensive research efforts are currently in progress. In this study, the availability of Earth GNSS signals in a Elliptical Lunar Frozen Orbit (ELFO) around the Moon was analyzed through simulation and virtual measurements were generated based on the analysis results. The simulation results show that signal availability in the lunar ELFO environment is limited, with most observable signals originating from the side lobes of GNSS satellites. Simple Least Squares-based positioning approaches consequently exhibit performance limitations. These results indicate the necessity of developing more advanced filtering-based navigation methods suitable for the lunar environment.
Lunar PNT, signal availability, GNSS, positioning performance
전 세계적으로 우주 탐사에 대한 관심이 커지면서, 이에 따라 달 탐사에 대한 관심 역시 빠르게 확대되고 있다. 국제우주탐사협의체 (International Space Exploration Coordination Group, ISECG)가 발표한 2024년 우주 탐사 로드맵에 따르면 달은 가장 중요한 중·단기 탐사 목표로 규정되며, 향후 화성 탐사로 나아가기 위한 핵심적인 중간 기착지로 평가된다 (ISECG 2024). 아울러 달은 심우주 탐사를 위한 다양한 기술과 시스템 운영을 검증할 수 있는 시험장으로서의 가치도 강조되고 있다 (NASA 2024). 이러한 흐름 속에서 유·무인 탐사 임무와 상주 기지 운영을 위한 기술 개발과 검증이 더욱 활발해지고 있으며, 실제 임무 수행 건수에서도 이러한 증가 추세가 뚜렷하게 확인된다 (NASA 2025). Fig. 1에서 확인할 수 있듯 최근 수십 년간 달 탐사 임무는 꾸준히 증가해 왔고, 특히 2020년대 들어 탐사 건수는 급격히 늘어나고 있다. 아직 2020년대 중반임에도 불구하고 2020–2030년 사이에는 이미 누적 13건 이상의 달 탐사 임무가 수행된 것으로 나타나, 국제적 달 탐사 활동이 새로운 확장 단계에 접어들었음을 보여준다. 이와 같은 추세는 달 탐사에 요구되는 핵심 기술에 대한 관심을 한층 더 높였으며, 자연스럽게 달 환경에서의 항법 시스템 구축 필요성에 대한 논의로 이어지고 있다 (NASA 2022).
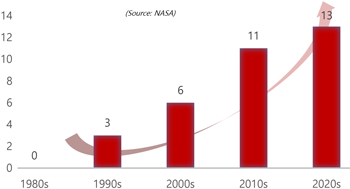
Fig. 1. Number of lunar exploration missions by decade.
달에서의 항법 시스템은 오랫동안 Deep Space Network (DSN)와 같은 대형 지구 지상국이 개별 우주선을 직접 추적하는 방식에 의존해왔다. 그러나 최근 우주 임무가 급격히 증가하고, 탑재되는 과학 장비의 복잡성과 데이터 생산량이 크게 늘어나면서 기존 DSN 기반의 통신•항법 방식은 여러 한계에 직면하고 있다. 특히 임무 수 증가에 따른 추적•통신 수요가 DSN 안테나의 처리 용량을 초과하기 시작하였다는 지적이 제기되고 있다 (Goh et al. 2021). 이러한 상황은 DSN의 일대일 우주선 추적 방식의 구조적 부담을 더욱 가중시키고, 달 및 심우주 탐사의 확장에 대응하기 위한 일대다 방식의 새로운 항법 인프라의 필요성을 부각시키고 있다.
일대다 방식의 달 항법 시스템은 크게 2단계 접근 방식으로 구분될 수 있다 (Kim & Park 2024). 제1단계는 기존의 Global Navigation Satellite System (GNSS) 신호를 활용하는 방식이며, 제2단계는 달 궤도에 별도의 항법 위성을 배치하는 방식이다. GNSS 기반 접근법은 지구상의 사용자를 대상으로 설계된 기존 GNSS 신호를 달 환경으로 확장하여 항법 서비스를 제공하는 것을 목표로 한다. 달에서 수신되는 신호가 매우 약하고, 위성 기하가 열악하다는 근본적인 한계를 지니고 있음에도 불구하고, GNSS 기반 접근법은 이미 구축된 인프라를 활용할 수 있다는 점에서 현실적이고 비용 효율적이라는 장점이 있다. 반면, 달 궤도 항법 위성을 이용하는 방식은 아직 해결해야 할 기술적 과제와 높은 개발·운영 비용이 예상되지만, 달에서 안정적이고 연속적인 항법 서비스를 제공하기 위해 장기적으로 반드시 구축해야 할 방향으로 평가된다. 이러한 필요성에 따라 미국 NASA의 LunaNet (NASA 2021), 유럽 ESA의 Moonlight (ESA 2024) 등 주요 우주 기관들은 달 항법 및 통신을 위한 통합 아키텍처를 제시하였고 이에 발맞추어 양방향 측정이 가능한 큐브 위성 기반의 달 항법 위성군 (Kim & Park 2023, Kim et al. 2025a)을 제안하는 등 달 궤도에 배치될 항법 위성군의 개념과 설계 방안을 구체화하고 있다 (Gramling et al. 2025, Fig. 2). 궁극적으로는 제2단계인 달 독자적인 항법 시스템 구축을 목표로 해야 하나 현재까지는 제1단계인 달 환경에서 GNSS 신호를 효과적으로 사용할 수 있는 방법에 대한 연구가 활발히 진행되고 있다. 대표적인 사례로, Lunar GNSS Receiver Experiment (LuGRE) 미션은 실제 달 궤도 및 표면에서 GPS와 Galileo의 L1/E1, L5/E5 신호 수신에 성공하였으며 (Fig. 3), 달 표면에서 수 킬로미터 수준의 위치 정확도를 달성한 것으로 보고되었다 (Fantinato et al. 2025). 이러한 배경 속에서 GNSS를 활용한 달 항법의 가능성과 한계를 평가하기 위한 시뮬레이션 연구의 필요성이 제기되었다.
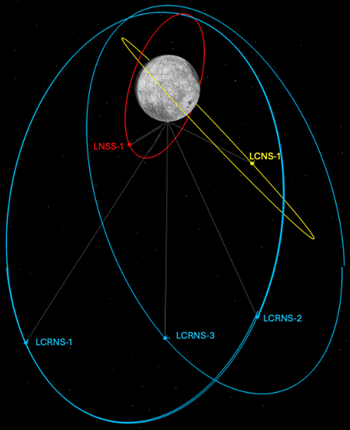
Fig. 2. Lunar orbital navigation satellite constellation.

Fig. 3. LuGRE mission blue ghost lander.
이러한 필요에 따라 지구상의 사용자를 위해 개발된 GNSS를 고고도 우주 공간과 달 인근 영역까지 활용 범위를 확장할 수 있는지에 대한 검토가 최근 활발히 이루어지고 있다. 국제위성항법위원회(International Committee on GNSS)는 다중 GNSS를 우주 사용자에게 안정적으로 제공하기 위한 Space Service Volume (SSV) 개념을 제시하며, 고고도에서의 신호 가용성과 기하구조 개선 효과를 분석하고 있다 (UN 2021). 또한, Delépaut et al. (2020)은 실제 GNSS 송신 안테나 패턴의 비대칭성과 사이드로브 특성을 반영한 시뮬레이션을 통해 달 궤도에서의 다중 GNSS 신호 가시성을 정밀하게 분석하였으며, 주파수 대역의 차이에 따른 성능 향상 효과와 유효 항법 메시지 확보 여부를 기준으로 한 가시성 분석을 진행하는 등 GNSS 활용 가능성을 다방면으로 평가하였다. 나아가 Kim et al. (2025b)은 의사거리와 도플러 측정치를 활용한 시뮬레이션을 통해 달 궤도에서의 GNSS 기반 궤도 결정 가능성을 검증하였으며, 수십 미터 수준의 위치 정확도가 달성될 수 있음을 제시하였다.
시뮬레이션 기반의 연구 외에도, 실제 우주 임무를 통한 GNSS 활용 가능성 역시 입증된 바 있다. NASA의 Magnetospheric Multiscale 임무는 GPS 신호를 활용해 고고도 항법 임무를 수행하였다 (Winternitz et al. 2017). 최대 지구 반경의 25배의 거리에서 GPS 기반 온보드 항법이 수행되었으며, 사이드 로브 신호를 포착하고 추적하는 기술이 검증되었다. 미약신호를 추적하는 기술은 GPS 위성군 보다 높은 고도에서도 탁월한 가시성을 확보할 수 있도록 하였고 수십 미터 수준의 궤도 추정 요구 사항을 훨씬 하회하는 수 미터 수준의 정밀도를 입증했다. 추가로 달 주변 환경에서의 GNSS 신호 수신 가능성을 입증하기 위한 실증 미션도 수행 중이다. 대표적으로 NASA와 Italian Space Agency의 협력 프로젝트인 LuGRE 미션은 NASA의 상업용 달 탑재체 서비스를 통해 달 표면에 고성능 GNSS 수신기를 착륙시켜 지구로부터 약 38만 km 떨어진 달 환경에서 GPS 및 Galileo 신호를 직접 수신하는 실험을 수행 중이다 (Parker et al. 2022, Konitzer et al. 2024). Fantinato et al. (2025)에 의하면 달 표면에서 GPS와 Galileo의 L1/L5 대역을 측정치를 활용해 수 킬로미터 수준의 위치 결정 정밀도를 달성하였음을 밝혔다. LuGRE 미션은 심우주 환경에서의 미약 신호 처리 기술과 다중 GNSS 가용성을 실제 데이터를 통해 검증한다는 점에서 큰 의미를 가지며, 향후 달 탐사선의 항법 성능을 크게 향상시킬 수 있는 분기점이 될 것으로 기대하고 있다.
이러한 연구 동향을 바탕으로, 이 연구는 송수신 안테나와 사이드 로브 특성을 반영한 시뮬레이션을 통해 제1단계인 달 궤도에서의 GNSS 기반 항법 성능을 체계적으로 분석하였다. 이 연구의 차별화된 기여도는 다음과 같다.
첫째, 단순 구형 방사 안테나 모델이 아닌 공식적으로 제공된 안테나 패턴 기반의 사이드로브 게인을 모델링함으로써, 약신호 수신 영역에서의 가용성을 확인하고 실제 환경에 부합하는 시뮬레이션 환경을 구축하였다. 둘째, 안테나 지향 모드 및 주파수 대역별 가시성 차이를 단순 결과 제시를 넘어 기하학적 배치와 전파 특성 측면에서 규명하여, 향후 달 궤도선 설계 시 최적의 안테나 운용 전략을 위한 분석적 토대를 마련하였다. 셋째, 기존 연구에서 충분히 다루어지지 않았던 지역 위성항법 시스템 신호를 추가적으로 고려하여, 다중 GNSS 환경이 달 궤도 측위 가용성 및 정밀도 개선에 미치는 영향을 정량적으로 분석하고 그 잠재성을 확인하였다.
이 연구에서는 현실적인 분석을 위해 실제 GNSS 위성의 궤도 데이터와 공개된 송신 안테나 패턴을 반영한 시뮬레이션 환경을 구축하였다. 전체 구조는 Fig. 4에 제시된 바와 같이, 달 궤도에서의 GNSS 신호 가시성 평가를 시작점으로 한다. 먼저 시뮬레이션 케이스에 따라 통합 가시성 및 신호 특성을 분석하고, 이를 기반으로 측정치 모델을 이용해 의사거리와 도플러 등 가상의 GNSS 측정치를 생성하였다. 그리고 GNSS 위성 방송 궤도와 시계 오프셋의 주기적 오차 요인을 모델링하여 항법 메시지 데이터를 구축함으로써 보다 현실적인 환경을 재현하였다. 마지막으로 생성된 측정치를 활용해 의사거리 기반 Weighted Least Squares 기법으로 위치 결정을 수행하며 시뮬레이션을 마무리하였다. 각 단계는 서로 유기적으로 연결되어 있어, 가시성 분석 결과는 측정치 생성의 핵심 입력으로 활용되며, 생성된 측정치는 최종 위치 결정 단계로 전달된다. 이러한 단계적 구조를 통해 달 궤도 환경에서의 GNSS 기반 위치결정 성능을 체계적으로 평가할 수 있도록 시뮬레이션 흐름을 구성하였다.
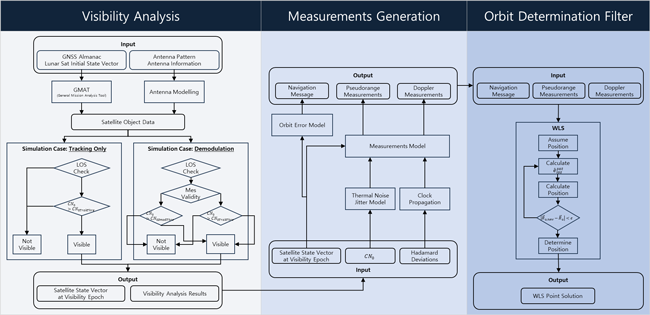
Fig. 4. Overall flowchart of the GNSS-based lunar navigation simulation.
신호 가시성 분석의 첫 단계는 GPS, Galileo, QZSS 위성군을 대상으로 달 궤도 환경에서의 가시성을 평가하는 것으로 시작되었다 (Fig. 5). 이를 위해 각 위성군에 대한 시계열 궤도 정보가 필요하며, 알마낙 데이터는 특정 시점에서의 위성 위치를 제공하는 기본 자료로 활용된다. 일본 내각부(Japanese Cabinet Office, CAO)가 운영하는 QZSS 공식 웹사이트에서는 GPS와 QZSS에 대한 통합 Yuma Almanac을 제공하고 있으며 (CAO 2026), European GNSS Service Centre (GSC)는 Galileo 위성의 XML 기반 알마낙 데이터를 배포하고 있다 (GSC 2025). 이 연구에서는 이러한 알마낙으로부터 획득한 궤도 6요소를 초기 조건으로 설정한 뒤, NASA의 오픈소스 궤도 해석 소프트웨어인 General Mission Analysis Tool (GMAT)을 이용하여 고정밀 궤도 전파를 수행하였다. 이를 통해 각 위성의 1분 간격 시계열 궤도 데이터를 구성하였다. Table 1에는 GNSS 위성의 궤도 정보 생성을 위해 활용된 주요 입력 자료와 처리 과정을 정리하였다.
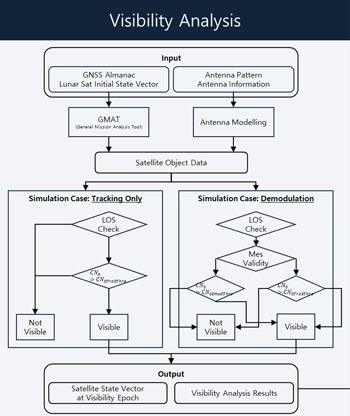
Fig. 5. Flowchart of the visibility analysis simulation.
Table 1. Overview of input data and processing workflow for generating GNSS satellite ephemerides.
| Reference time | Constellation | Almanac data provider | Almanac file format | Number of simulated satellites | Orbit propagator | Ephemeris resolution |
|---|---|---|---|---|---|---|
| 2025/11/11 00:00 | GPS | CAO | Yuma | 32 | GMAT propagator (Runge-Kutta 4th) | 1 min |
| Galileo | GSC | XML | 25 | |||
| QZSS | CAO | Yuma | 5 |
달 위성의 궤도는 달 중력장의 불균일성과 지구의 삼체 섭동 등 다양한 외란 환경에서도 비교적 안정적으로 유지되는 Frozen Orbit 계열 중 하나인 Elliptical Lunar Frozen Orbit (ELFO)으로 선정하였다 (Kang et al. 2025). ELFO는 고이심률 타원궤도 구조를 가지며, 특정 궤도 요소의 장주기 변화를 최소화할 수 있어 장기간 운용에 유리하다는 점에서 달 탐사 연구에서 널리 활용된다. 특히 South ELFO는 달 남극 지역에 대한 관측성과 커버리지가 우수한 것으로 알려져 있어 미래 활용 가능성이 높아 이 연구의 시뮬레이션에 적합한 대표 궤도로 판단하였다. 이에 따라 South ELFO의 궤도 요소를 초기 조건으로 설정하고 GMAT을 이용해 달 환경의 주요 섭동을 반영한 고정밀 궤도 전파를 수행하여 달 위성의 시계열 궤도 데이터를 생성하였다. Table 2에는 이러한 궤도 정보 생성을 위해 사용된 입력 자료와 처리 절차를 정리하였다.
Table 2. Overview of initial conditions and processing procedures for lunar satellite ephemeris generation.
| Reference time | Orbital parameters | Lunar gravity field model | Third-body perturbations | Solar radiation pressure | Orbit propagator | Ephemeris resolution | |
|---|---|---|---|---|---|---|---|
| 2030/01/01 00:00 | $a$ | 6211.4 km | LP-165 (25×25) | Earth, Sun | Spherical | GMAT propagator (Runge-Kutta 4th) | 1 min |
| $e$ | 0.67 | ||||||
| $i$ | 55° | ||||||
| $\Omega$ | 0° | ||||||
| $\omega$ | 90° | ||||||
| $\nu$ | 0° | ||||||
안테나 패턴은 전파가 안테나를 통해 특정 방향으로 얼마나 강하게 송수신되는지를 나타내는 특성으로, 위성 안테나 좌표계에서 정의되는 오프 보어사이트 각 (θ)과 방위각 (ϕ)의 함수로 표현된다 (Figs. 6, 7, JRC 2024). 이는 신호가 안테나로 유입되거나 송출되는 방향에 따라 게인이 어떻게 변화하는지를 보여주는 핵심 지표이며, 가시성 분석 결과에 직접적인 영향을 미친다. GNSS 송신 안테나의 메인로브는 지구 사용자를 대상으로 설계되어 대부분의 에너지가 지구 방향으로 집중되고, 그 결과 달 궤도에서는 지구 차폐로 인해 메인로브 신호 수신이 거의 불가능하다. 따라서 달 궤도에서 수신 가능한 신호는 주로 사이드로브 성분에 의존하게 된다. 이러한 특성을 고려할 때, 안테나 패턴의 단순화—특히 사이드로브 게인에 대한 과도한 간략화—는 가시성 분석 결과를 크게 왜곡할 수 있다. 이에 이 연구에서는 단순 모델 대신 공개된 GNSS 송신 안테나 패턴을 적용하여 사이드로브 게인 분포가 시뮬레이션 결과에 정확하게 반영되도록 구성하였다.
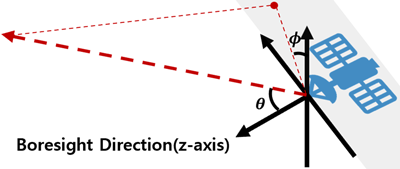
Fig. 6. Off-boresight angle (θ) and azimuth angle (ϕ).
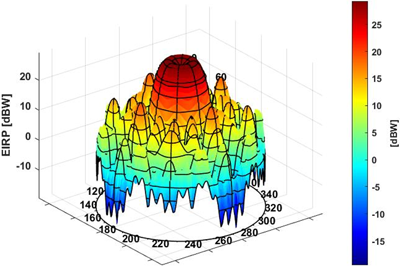
Fig. 7. Galileo reference antenna pattern (GRAP).
GPS 위성은 블록(block)별로 제조사가 상이하며, 이로 인해 공개된 안테나 패턴 정보의 범위에서도 차이가 존재한다. 현재 운용 중인 위성 중 Block IIR, IIRM, III는 Lockheed Martin에서 제작되었고, Block IIF는 Boeing이 제작하였다. 제작 주체의 차이는 안테나 패턴 공개 범위에도 반영되어, Lockheed Martin은 지상 시험을 기반으로 메인로브와 사이드로브를 모두 포함한 안테나 패턴 데이터를 공개한 반면 (Marquis & Reigh 2015), Boeing은 메인로브 정보만을 공개하여 사이드로브 패턴에 대한 활용 가능한 자료가 부족한 상황이었다. 이러한 정보 비대칭은 사이드로브 신호에 주로 의존하는 Space Service Volume 사용자 성능 분석에서 보수적인 가정을 적용할 수밖에 없는 제약을 발생시켰으며, 이를 보완하기 위한 정량적 안테나 패턴 모델의 필요성이 제기되었다. 이후 GPS Antenna Characterization Experiment의 수행을 통해 Block IIF 위성의 사이드로브 패턴 정보가 확보되면서 (Donaldson et al. 2020), 기존의 데이터 공백이 해소되었다. 현재 GPS 위성 안테나 패턴 자료는 United States Coast Guard Navigation Center (NAVCEN)에 의해 데이터시트 형식으로 통합 제공되고 있다 (NAVCEN 2026).
Galileo 위성의 안테나 패턴은 European Commission 산하 Joint Research Centre (JRC)에서 제공한다 (JRC 2024). Full Operational Capability 위성들을 대상으로 재구성한 3차원 평균 안테나 패턴이 데이터시트 형식으로 배포되고 있다 (Menzione et al. 2024). 해당 데이터는 Galileo Reference Antenna Pattern (GRAP)으로 명명되며 GPS와 달리 Equivalent Isotropic Radiated Power (EIRP)의 공간적 분포를 제공하는 것이 특징이다. EIRP는 송신 전력과 안테나 게인을 합산한 안테나 성능 지표로, GPS 데이터시트가 안테나 게인으로만 구성된 것과 비교해 차이가 존재한다.
QZSS 위성의 안테나 패턴 역시 QZSS 공식 웹사이트를 통해 제공되며 (CAO 2023), 현재 7기의 위성에 대한 패턴 데이터가 공개되어 있다. GPS와 마찬가지로 안테나 게인 값에 대한 데이터시트를 제공하며, 이 연구에서는 이 중 실운용 중인 5기(QZS02, QZS03, QZS04, QZS1R, QZS06)의 데이터를 활용하였다. Table 3에는 이 시뮬레이션에서 사용한 모든 안테나 패턴의 정보에 대해 요약하였다.
Table 3. Antenna pattern data used in the simulation.
| Constellation | Data source | Data provider | |
|---|---|---|---|
| GPS | Block IIR | Lockheed Martin | NAVCEN |
| Block IIRM | Lockheed Martin | ||
| Block IIF | Boeing / ACE project | ||
| Block III | Lockheed Martin | ||
| Galileo | JRC | European commission | |
| QZSS | CAO | CAO | |
마지막으로 달 위성의 수신 안테나 게인 패턴은 MATLAB의 Antenna Toolbox를 활용하여 모델링된 패치 배열 안테나 데이터를 기반으로 구현되었다. 해당 Toolbox는 패치 소자의 기하학적 형상과 배열 간격에 따른 전자기적 상호작용을 계산하여 안테나 보어사이트로부터의 고도각 및 방위각 변화에 따른 게인 값을 산출한다. 이에 이 연구에서는 기본으로 정의된 패치 안테나 소자를 기반으로 3×3 배열 안테나를 구성하여 달 위성에 적합한 고이득 안테나를 모델링하였다. 달 궤도에서의 미약 신호 수신을 위해 peak gain이 약 14~16 dBi인 LuGRE high gain antenna의 특성을 모사하고자, 3×3 패치 배열 안테나를 구성하여 시뮬레이션에 적용하였다 (Parker et al. 2022).
위성 궤도력과 안테나 게인 패턴을 기반으로 각각의 위성 객체를 구성하였다면 본격적인 가시성 분석 절차가 시작된다. 이 연구에서는 달 궤도에서 GNSS 기반 항법 운용 가능성을 보다 현실적으로 평가하기 위해, 수신기 운용 방식에 따라 시뮬레이션 케이스를 두 가지로 구분하였다. 두 케이스는 GNSS 신호로부터 획득되는 정보의 범위와 항법 데이터의 공급 방식에 따라 tracking only 케이스와 demodulation 케이스로 정의된다. tracking only 케이스는 GNSS 위성 신호의 반송파 및 코드 추적이 가능한 경우를 가정하여, 수신기로부터 의사거리 측정치만을 획득하는 조건을 고려한다. 이때 위성의 궤도 정보 및 시계 보정 정보와 같은 항법 메시지는 GNSS 신호를 통해 직접 복조하지 않고, 별도의 외부 네트워크 채널을 통해 사전에 제공되는 것으로 가정한다. 이는 A-GNSS와 유사한 개념으로, 달 궤도 환경에서 제한적인 신호 세기 또는 짧은 가시 시간으로 인해 항법 메시지의 안정적인 복조가 어려운 상황에서도 측정치 기반 위치 결정이 가능한지를 평가하기 위한 케이스이다. Demodulation 케이스는 GNSS 신호로부터 의사거리 측정치뿐만 아니라 항법 메시지 또한 수신기가 직접 실시간으로 복조하는 경우를 가정한다. 해당 케이스에서는 충분한 캐리어 대 잡음비 ($CN_0$)와 연속적인 신호 수신이 확보되어야 하며, 위성 궤도 정보 및 시계 보정 정보가 GNSS 신호에 포함된 항법 데이터로부터 자립적으로 획득된다. 이는 외부 보조 정보에 의존하지 않는 순수 GNSS 기반 항법 운용 가능성을 평가하기 위한 기준 케이스로 설정하였다.
각 케이스는 수신기 운용 방식에 따른 상위 분류 이후, 위성의 자세 및 안테나 지향 조건에 따라 다시 세부 케이스로 구분된다. 이는 동일한 신호 수신 조건하에서도 위성의 자세 제어 방식에 따라 안테나 보어사이트 방향과 가시 위성 분포가 달라질 수 있음을 고려하기 위함이다. 이 연구에서는 달 위성의 GNSS 수신 안테나가 항상 지구 중심 방향을 지향하는 Earth-Pointing 자세 모델과 더불어, GNSS 위성의 운용 개념에서 차용한 Yaw-Steering 자세 모델을 추가적인 세부 케이스로 설정하였다 (Kim et al. 2025b). Yaw-Steering 자세 제어는 안테나를 별도로 지향 제어하지 않고 위성 동체에 고정한 상태에서, 위성의 자세 제어를 통해 안테나 지향을 함께 달성하는 방식이다. 본래 GNSS 위성에서 태양전지판이 항상 태양 방향을 향하도록 하기 위해 사용되는 대표적인 자세 제어 기법으로, 태양전지판이 빛을 받는 면을 기준으로 정의된 반구 안에 태양이 항상 위치하도록 위성의 자세를 유지하는 특성을 갖는다 (Montenbruck et al. 2015). 이러한 개념을 달 궤도 환경에 적용하여, 달 위성의 GNSS 수신 안테나가 위치한 반구가 항상 지구 방향을 향하도록 설정함으로써, 안테나 지향 방식에 따른 가시성 및 신호 특성 변화를 분석하였다. 지구–달 환경에서 Yaw-Steering 자세 모델을 적용할 경우, 동체 좌표계의 각 축은 지구와 달 위성 간 상대 위치를 기준으로 정의되며, Eqs. (1-4)을 통해 각 축에 대한 단위벡터를 계산한다. 이때 $r$은 관성 좌표계 상에서 객체의 위치 벡터, $e$는 각 축의 단위 벡터, 하첨자 $sat$은 달 위성을 나타내며, 동체 좌표계의 $z$축은 GNSS 수신 안테나의 보어사이트 방향에 대응하도록 설정된다. 총 4개의 케이스가 구성되며, 각 케이스에 대한 요약은 Table 4에 정리하였다.
$$e_{earth} = \frac{r_{earth} – r_{sat}}{|r_{earth} – r_{sat}|}$$
$$e_{y} = -\frac{r_{sat}}{|r_{sat}|}$$
$$e_{x} = \frac{e_{earth} \times r_{sat}}{|e_{earth} \times r_{sat}|}$$
$$e_{z} = e_{x} \times e_{y}$$
Table 4. Simulation Cases for visibility analysis.
| No. | Receiver operational mode (Tracking only / Demodulation) | Antenna pointing condition (Earth-pointing / Yaw-steering) |
|---|---|---|
| Case 1 | Tracking only | Earth-pointing |
| Case 2 | Tracking only | Yaw-steering |
| Case 3 | Demodulation | Earth-pointing |
| Case 4 | Demodulation | Yaw-steering |
가시성 분석의 전체 흐름은 수신기 운용 방식에 따라 일부 차이를 가지지만, Line Of Sight (LOS)가 확보되었는지에 대한 판단 절차는 공통적으로 진행된다. 우선 지구 또는 달에 의한 물리적 차폐 여부를 고려하며, 두 위성을 잇는 직선 경로가 천체에 의해 가려질 경우 물리적인 LOS가 형성되지 않는 것으로 판단하여 해당 GNSS 위성은 비가시 상태로 분류한다. 이러한 차폐 여부는 구와 직선 간의 기하학적 위치 관계를 기반으로 수학적으로 판별할 수 있다. 물리적인 LOS가 확보된 경우에는 안테나 지향 조건을 추가적으로 고려한다. LOS가 유효하기 위해서는 GNSS 위성의 송신 안테나와 달 위성의 수신 안테나 커버리지가 중첩되어야 하며, 일반적으로 GNSS 안테나가 반구형 방사 특성을 갖는다는 점을 반영하였다. 이에 따라 달 위성과 GNSS 위성을 잇는 직선과 각 위성 안테나의 지향 벡터 간 각도가 예각을 이루면, 두 위성 간 안테나 커버리지가 중첩된 것으로 판단하여 해당 GNSS 위성에 대해 비로소 LOS가 확보된 것으로 간주한다.
LOS가 확보된 이후 가시 신호에 대한 판정 절차는 항법 메시지의 공급 방식에 따라 차이를 보인다. Tracking only 케이스의 경우, 별도의 네트워크 채널을 통해 GNSS 위성의 최신 궤도력 및 시계 보정 정보가 사전에 제공되는 것으로 가정한다. 따라서 측위에 필요한 의사거리 측정치가 생성 가능하다면 해당 신호는 유효한 가시 신호로 간주된다. 구체적으로, 신호의 $CN_0$가 수신기의 최소 수신 감도를 상회할 경우 수신기는 코드 상관을 통해 의사거리 측정치를 생성할 수 있으며, 이때 해당 GNSS 신호는 가시 상태로 판정된다. 이 연구에서는 수신기의 최소 수신 감도를 15 dB-Hz로 설정하였으며, 이는 우주 공간에서 미약한 GNSS 신호 수신을 목적으로 설계된 전용 수신기의 성능 지표를 반영한 값이다 (Blunt et al. 2016). 신호의 CN_0는 Link Budget 공식을 기반으로 산출하였다. Link Budget은 신호가 송신측에서 수신측으로 전파되는 과정에서 발생하는 모든 전력 이득과 손실을 정량적으로 고려하는 방법으로, 우주 환경에서의 Link Budget 식은 Eq. (5)와 같이 표현될 수 있다 (Konitzer et al. 2024).
$$\begin{align}
CN_{0} &= P_{T} + G_{T}(\phi, \theta) – L_{free} + G_{R}(\phi, \theta) – L_{pol} – L_{ther} – R_{loss} \notag \\
L_{free} &= 20 \log\left(\frac{4\pi d}{\lambda}\right) \notag \\
L_{ther} &= 10 \log(k T_{sys})
\end{align}$$
여기서 $P_T$는 GNSS 위성의 송신 전력, $G_T$는 송신 안테나 게인, $L_{free}$는 자유 공간 경로 손실, $G_R$은 수신 안테나 게인, $L_{pol}$은 편파 불일치에 따른 손실, $L_{ther}$는 열잡음에 의한 손실, $R_{loss}$는 수신기 내부에서 발생하는 기타 손실 항을 각각 나타낸다. Link Budget 모델에 사용된 각 파라미터는 Table 5에 정리하였다. 추가로 GNSS 위성이 각 신호에 할당하는 송신 전력의 세기는 위성 또는 주파수마다 상이하기 때문에 Table 6에 별도로 정리하였고, Galileo 위성의 경우 안테나 게인과 신호 송신 전력의 값을 EIRP로 통합 제공하기에 표에는 수치가 명시되지 않았다 (Hrbek et al. 2016, Wang et al. 2018, Donaldson et al. 2020, Kim et al. 2025b).
Table 5. Parameters used in the link budget model.
| Symbol | Description | Value |
|---|---|---|
| $d$ | Satellite to receiver distance | |
| $\lambda$ | Carrier frequency | |
| $L_{pol}$ | Polarization loss | 3 dB |
| $k$ | Boltzmann constant | $1.380649 \times 10^{-23} J/K$ |
| $T_{sys}$ | System noise temperature | 295K |
| $R_{loss}$ | Receiver implementation loss | 0.9 dB |
Table 6. Transmit power levels by signal type [dBW].
| Constellation | L1/E1 | L5/E5 | Remarks | ||
|---|---|---|---|---|---|
| GPS | Block IIR | 14.01 | Block IIR | – | L5 not available |
| Block IIRM | 16.53 | Block IIRM | – | L5 not available | |
| Block IIF | 15.39 | Block IIF | 18.39 | ||
| Block III | 16.53 | Block III | 19.53 | ||
| Galileo | – | – | Integrated as EIRP (transmit power N/A) | ||
| QZSS | 14.1 | 15.6 | – | ||
Demodulation 케이스에서는 수신기가 GNSS 신호로부터 항법 메시지를 자립적으로 복조해야 하므로, LOS 및 안테나 지향 조건을 만족한 이후에도 항법 메시지 보유 여부와 복조 가능 신호 세기를 추가적으로 고려한다. Fig. 5에 도시한 바와 같이, 먼저 수신기 (달 위성) 가 해당 GNSS 위성에 대한 유효한 항법 메시지를 보유하고 있는지 확인한다. 유효한 항법 메시지가 존재하는 경우에는 동일 메시지를 불필요하게 재복조하지 않으며, 신호의 세기가 최소 수신 감도를 만족하여 의사거리 측정치 생성이 가능하면 해당 신호를 유효 가시 신호로 판정한다. 반면 유효한 항법 메시지가 존재하지 않는 경우에는, 수신기가 위성 궤도력 및 시계 보정 정보를 포함하는 항법 메시지를 새롭게 복조해야 한다. 따라서 신호가 복조 최소 한계를 상회하는 수준으로 유지되면서 항법 메시지 복조가 완료될 때까지 복조 시간 동안 연속적으로 수신되어야 하며, 이 조건을 만족하지 못할 경우 해당 신호는 비가시로 분류한다. 또한 메시지 유효성을 고려하기 위해, 복조된 항법 메시지는 일정 시간이 경과하면 효력을 상실하도록 단순화된 노후화 모델을 적용하였다.
위성군별 항법 메시지 갱신 메커니즘은 상이하고 그 과정이 복잡하나, 이를 상세히 구현하는 것은 이 연구의 주제와 직접적인 관련성이 낮고 가시성 분석 결과에 미치는 영향도 낮을 것이라고 판단하였다. 이에 따라 이 연구에서는 항법 메시지를 복조한 시점을 해당 메시지의 Time of Ephemeris로 간주하여 최신 메시지를 획득한 것으로 가정하였으며, 복조 시점으로부터 약 4시간 동안 항법 메시지가 유효하다고 설정하였다. 이는 달 임무 환경에서 요구되는 궤도력 정밀도가 지상 사용자 환경에 비해 상대적으로 완화될 수 있다는 점을 고려한 선행 문헌의 가정을 차용한 것이다 (Delépaut et al. 2020). 이러한 단순화는 분석의 결과를 크게 왜곡하지 않으면서 시뮬레이션 절차를 간결하게 유지하기 위해 고려되었다. Demodulation 케이스 구현을 위한 항법 메시지별 복조 최소 한계 및 복조 시간은 Table 7에 요약하였다 (Delépaut et al. 2020, CAO 2021).
Table 7. Demodulation parameters.
| Message | Demodulation threshold [dB-Hz] | Demodulation duration [sec] |
|---|---|---|
| GPS LNAV | 26.5 | 48 |
| GPS CNAV | 26.1 | 24 |
| Galileo I/NAV | 27.7 | 30 |
| Galileo F/NAV | 20.7 | 50 |
| QZSS LNAV | 26.5 | 30 |
| QZSS CNAV | 24.5 | 60 |
항법 메시지별 복조 최소 한계 세기는 비트 오류율(Bit Error Rate, BER)을 기준으로 산정하였다. 구체적으로는 BER 10^(-5)를 목표 성능으로 설정하고, 각 항법 메시지의 비트율과 데이터 채널에 분배되는 전력 비율 그리고 인코딩 방식을 고려하여 복조 최소 요구 신호 세기를 조정하였다 (Won et al. 2012). 항법 메시지별 복조 시간은 최악의 수신 상황을 가정한 보수적인 기준으로 산정하였다. 항법 메시지에는 측위를 위해 필수적인 위성 궤도력 및 시계 보정 정보가 모두 포함되어야 하며, 해당 정보가 완전히 복조된 이후에만 위치 결정이 가능하다. 예를 들어 QZSS LNAV의 경우, 항법 메시지는 총 5개의 서브프레임으로 구성되며 시계 보정 정보와 위성 궤도력은 각각 서브프레임 1과 2, 3에 포함된다. 달 위성 수신기가 최악의 경우 서브프레임 4부터 수신을 시작한다고 가정하면, 다음 주기의 서브프레임 3까지 연속적으로 신호를 수신해야 필수 정보가 모두 복조된다. LNAV의 비트율이 50 bit/s이고 각 서브프레임이 300 비트로 구성되어 있음을 고려할 때, 서브프레임 4부터 다음 주기의 서브프레임 3까지를 모두 수신하는 데에는 총 약 30초가 소요된다. 이 연구에서는 이와 같은 방식으로 항법 메시지별 복조 시간을 보수적으로 산정하였다.
위와 같은 가시성 분석 시뮬레이션 절차를 통해 각 GNSS 위성이 가시한 시점에서의 상태 벡터를 기록할 수 있으며, 이렇게 도출된 GNSS 위성의 상태 벡터는 시뮬레이션의 다음 단계인 측정치 생성 과정의 입력값으로 활용된다. 가시성 분석 시뮬레이션 결과에 대한 정량적 분석 내용은 3장에서 자세히 다룬다.
이 시뮬레이션에서는 의사거리만을 활용한 측위를 수행하였다. Least Squares 기반의 위치결정을 위해서는 위성과 수신기 사이의 의사거리 측정치뿐 아니라, 위성 궤도력 및 시계 오차 정보가 포함된 항법 메시지가 함께 제공되어야 한다. 이에 따라 이번 절에서는 항법에 필요한 데이터를 구성하는 두 요소인 의사거리 모델과 항법 메시지 생성 방식을 설명한다 (Fig. 8). 의사거리는 지구 대기 효과와 멀티패스 오차를 제외한 간소화된 모델을 사용하였으며, 항법 메시지에는 주기적인 오차 성분이 포함된다는 점을 고려하여 이를 수학적으로 모델링하였다.
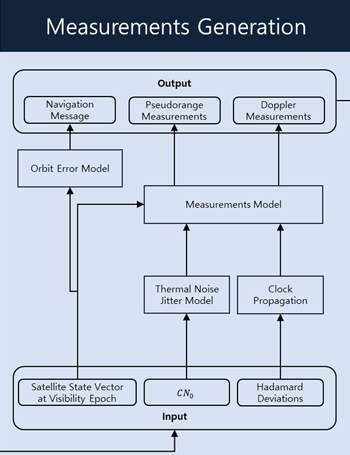
Fig. 8. Flowchart of the measurements generation simulation.
지상 GNSS에서 일반적으로 사용되는 의사거리 측정식은 Eq. (6)과 같이 표현할 수 있다.
$$P_{r}^{s} = \rho_{r}^{s} + c(dt_{r} – dt^{s}) + T_{r}^{s} + I_{r}^{s} + M_{r}^{s} + \epsilon_{ther_{r}}$$
여기서 상첨자 $s$는 위성을, 하첨자 $r$은 수신기를 의미한다. 이는 위성과 수신기 사이의 실제 기하학적 거리 ($\rho_r^s$)에 다양한 오차 성분이 더해진 형태로 해석할 수 있다. 오차 성분에는 수신기 시계 오차 ($dt_r$), 위성 시계 오차 ($dt^s$), 대류권 지연 오차 ($T_r^s$), 전리층 지연 오차 ($I_r^s$), 멀티패스 오차 ($M_r^s$) 그리고 수신기 열 잡음 ($\epsilon_{ther_r}$)이 존재한다. 이러한 오차 성분은 발생 원인에 따라 위성부에서 기인한 오차, 신호 전파 과정에서 발생하는 오차, 그리고 수신부에서 기인한 오차로 구분된다.
위성부에서 기인하는 오차는 위성 시계 오차 ($dt^s$)이다. 위성 시계의 주파수는 여러 요인에 의해 변동하며, 이는 불규칙적인 잡음 성분과 장기적인 가속 성분으로 분리하여 모델링할 수 있다. 이 연구에서는 시계 오차 및 드리프트를 백색 잡음 과정을 사용해 모델링하기 위해 Hadamard 분산을 사용하였으며, 해당 분산을 구성하는 q-파라미터를 기반으로 시계 잡음 및 가속에 따른 오차를 모델링하였다 (Long 2024). 위성에 탑재된 시계를 루비듐 원자 시계로 가정할 경우, 랜덤 잡음 특성을 나타내는 q-파라미터는 Table 8에 제시되어 있으며, Eqs. (7, 8)을 통해 시계 오차 항으로 반영하였다.
$$\begin{bmatrix} dt_{r}(i+1) \\ d\dot{t}_{r}(i+1) \\ d\ddot{t}_{r}(i+1) \end{bmatrix} = \begin{bmatrix} 1 & \Delta T & \frac{\Delta T^{2}}{2} \\ 0 & 1 & \Delta T \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} dt_{r}(i) \\ d\dot{t}_{r}(i) \\ d\ddot{t}_{r}(i) \end{bmatrix} + Q \begin{bmatrix} \epsilon_{1} \\ \epsilon_{2} \\ \epsilon_{3} \end{bmatrix}$$
$$QQ^{T} = c^{2} \begin{bmatrix} q_{1}\Delta T + q_{2}\frac{\Delta T^{3}}{3} + q_{3}\frac{\Delta T^{5}}{20} & q_{2}\frac{\Delta T^{2}}{2} + q_{3}\frac{\Delta T^{4}}{8} & q_{3}\frac{\Delta T^{3}}{6} \\ q_{2}\frac{\Delta T^{2}}{2} + q_{3}\frac{\Delta T^{4}}{8} & q_{2}\Delta T + q_{3}\frac{\Delta T^{3}}{3} & q_{3}\frac{\Delta T^{2}}{2} \\ q_{3}\frac{\Delta T^{3}}{6} & q_{3}\frac{\Delta T^{2}}{2} & q_{3}\Delta T \end{bmatrix}$$
Table 8. q-parameters defining the Hadamard variance of the rubidium atomic clock.
| Clock model | $q_1$ | $q_2$ | $q_3$ |
|---|---|---|---|
| RAFS | 3.70e−24 | 1.87e−33 | 7.56e−59 |
여기서 $\Delta T$는 시계 오차를 적분하는 시간 간격을, $c$는 광속을, $\epsilon$은 평균이 0, 표준편차가 1인 랜덤 변수를 의미한다.
신호 전파 과정에서 발생하는 오차로는 전리층 ($I_r^s$) 및 대류권 ($T_r^s$) 지연 오차가 존재하나, GNSS 위성은 전리층 상한 고도보다 훨씬 높은 궤도에 위치하기 때문에 달 궤도 환경에서는 대부분의 GNSS 신호가 지구 대기를 통과하지 않으므로 이러한 효과를 무시할 수 있다 (Delépaut et al. 2024). 전체 안테나 커버리지 중 약 4° 이내의 신호들은 지구 대기 및 전리층을 통과하기도 하는데 이 경우 대기를 매우 길게 통과하게 되어 지연 오차가 크게 증가한다. 이러한 신호는 지상에서 사용되는 기존 보정 모델로 제거하는 데 한계가 있으므로, 이 시뮬레이션에서는 전리층 고도에 대해 보수적인 상한선인 1000 km를 설정하고, 해당 고도 이하를 통과하는 신호는 사용자 측에서 마스킹하여 배제하였다. 또한 우주 공간에서는 물리적 장애물의 영향을 무시할 수 있으므로 멀티패스 오차 ($M_r^s$) 역시 배제하였다.
마지막으로 수신부에서 기인하는 오차는 수신기 시계 오차 ($dt_r$)와 열 잡음 ($\epsilon_{ther_r }$)으로 구분된다. 수신기 시계 오차는 위성 시계 오차와 동일하게 루비듐 원자 시계를 가정하여 Hadamard 분산 기반 모델을 적용하였다. 열 잡음에 의한 의사거리 오차는 $CN_0$에 따라 통계적으로 모델링되며, 신호 품질이 저하될수록 delay lock loop에서 상관 피크 위치 추정 오차가 증가하여 의사거리 측정 오차가 커지게 된다. $CN_0$에 따른 열 잡음 오차의 일반적인 모델은 Kaplan & Hegarty (2006)에 제시된 수식을 따라 그 표준편차 값을 Eq. (9)에 정리하였으며, 상세한 파라미터들은 수신기 세부 특성에 따라 조정된다. Eq. (9)에 적용된 수신기 주요 파라미터 및 변수는 Table 9에 정리하였다 (Kim et al. 2025b). 이때 Eq. (9)를 통해 도출된 표준편차 값은 Eq. (10)과 같이 무작위 확률 변수에 곱해져 측정치에 반영될 수 있다.
$$\sigma_{ther} = \begin{cases}
cT_c \sqrt{\frac{B_n}{2 \frac{C}{N_0}} D \left[ 1 + \frac{2}{T \frac{C}{N_0}(2-D)} \right]}, & D \ge \frac{\pi R_c}{B_{fe}} \\
cT_c \sqrt{\frac{B_n}{2 \frac{C}{N_0}} \left[ \frac{1}{B_{fe}T_c} + \frac{B_{fe}T_c}{\pi – 1} \left( D – \frac{1}{B_{fe}T_c} \right)^2 \right] \left[ 1 + \frac{2}{T \frac{C}{N_0}(2-D)} \right]}, & \frac{R_c}{B_{fe}} < D < \frac{\pi R_c}{B_{fe}} \\
cT_c \sqrt{\frac{B_n}{2 \frac{C}{N_0}} \left( \frac{1}{B_{fe}T_c} \right) \left[ 1 + \frac{1}{T \frac{C}{N_0}} \right]}, & D \le \frac{R_c}{B_{fe}}
\end{cases}$$
$$\epsilon_{ther_{r}} = \sigma_{ther} \cdot \omega, \quad \omega \sim N(0,1)$$
Table 9. Key parameters and variables used for modeling receiver thermal noise.
| Symbol | Description | Value |
|---|---|---|
| $c$ | Speed of light [km/s] | 299792.458 |
| $T_c$ | Chip period [s] | $\frac{1}{R}$ |
| $B_n$ | Loop noise bandwidth [Hz] | 0.5 |
| $\frac{C}{N_0}$ | Carrier to noise ratio [Hz] | |
| $T$ | Predetection integration time [s] | 0.02 |
| $D$ | Early-to-late correlator spacing [Chips] | 0.3 |
| $R_{c,L1}$ $R_{c,L5}$ | Chipping rate [MChips/s] | 1.023 10.023 |
| $B_{fe,L1}$ $B_{fe,L5}$ | Double-sided front-end bandwidth [MHz] | 24.552 20.46 |
이러한 가정을 종합하면, 우주 공간 환경에 적용 가능한 의사거리 측정식은 Eq. (11)과 같이 간소화할 수 있다.
$$P_{r}^{s} = \rho_{r}^{s} + c(dt_{r} – dt^{s}) + \epsilon_{ther_{r}}$$
위성은 지상국에서 추정된 자신의 궤도 정보와 시계 오프셋 정보를 항법 메시지에 포함하여 사용자에게 방송한다. 그러나 이러한 방송 궤도 및 시계 정보에는 주기적인 오차 성분이 포함되어 있다 (Lee et al. 2025). 이는 위성 궤도에 영향을 미치는 천체 섭동이 본질적으로 주기적인 특성을 가지며, 항법 메시지 또한 지상국에 의해 일정 주기로 갱신되는 메커니즘을 따르기 때문이다. 이 연구에서는 이러한 특성을 반영하기 위해, 방송 오차 성분을 Eq. (12)과 같이 주기 함수로 모델링하고 이를 참값으로 생성한 궤도 및 시계 오차에 추가함으로써 실제 방송되는 항법 메시지를 모사하였다 (Long 2024).
$$e(t) = A(0) + \sum_{i=1}^{N} \left[ A(2i-1) \cos\left(\frac{2\pi}{T_{i}}t\right) + A(2i) \sin\left(\frac{2\pi}{T_{i}}t\right) \right]$$
여기서 $A$는 궤도 및 시계 오프셋 정보에 포함된 오차의 크기를 나타내는 계수로, 과거 방송 항법 메시지의 오차 특성을 분석하여 적절한 수준으로 설정할 수 있다. $T$는 방송 데이터에 내재된 주기성을 나타내는 변수로, 기존 GNSS 방송 궤도력 오차 분석 사례를 참고하여 24시간, 12시간, 8시간의 주기 성분이 존재한다고 가정하고 이에 따른 오차를 생성하였다.
Fig. 9의 검은색 선은 GPS PRN01 위성의 과거 방송 궤도력과 정밀 궤도력 간의 차이를 나타낸다. 정밀 궤도력을 참값으로 간주할 때, 두 값의 차이는 실제 방송 메시지가 포함하는 오차로 정의될 수 있다. 해당 오차에서 관측되는 주기적 특성을 정량화 하기 위해 최소자승법 기반의 커브 피팅을 수행하였으며, 이를 통해 주기 함수의 각 계수를 도출하였다. 오차는 좌표계의 각 축 방향 및 시계 오차 성분별로 독립적으로 모델링 되었다. 대표 사례로 분석한 GPS PRN01 위성의 방송 메시지 오차 성분을 나타내는 상세 계수 값은 Table 10과 같다.
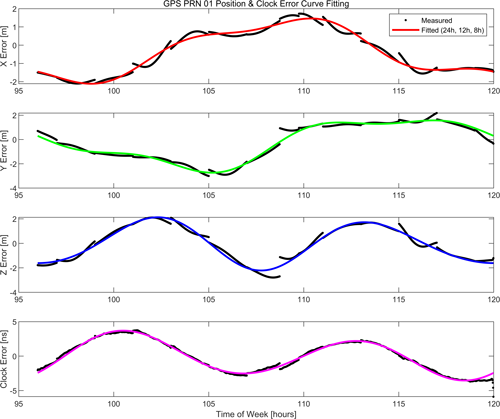
Fig. 9. Curve fitting results of GPS PRN 01 orbit and clock errors.
Table 10. Coefficients of harmonic fitting for GPS PRN 01 orbit [m] and clock errors [s].
| $A(\mathbf{0})$ | $A(\mathbf{1})$ | $A(\mathbf{2})$ | $A(\mathbf{3})$ | $A(\mathbf{4})$ | $A(\mathbf{5})$ | $A(\mathbf{6})$ | |
|---|---|---|---|---|---|---|---|
| $e_x$ | -0.37 | -1.57 | -0.38 | 0.13 | 0.02 | 0.36 | -0.18 |
| $e_y$ | -0.22 | 0.67 | -1.86 | -0.12 | 0.36 | -0.03 | -0.48 |
| $e_z$ | -0.04 | -0.07 | 0.12 | -1.87 | 0.16 | 0.36 | -0.15 |
| $e_{clock}$ | -3.76e-11 | -1.95e-11 | 7.60e-10 | -2.24e-9 | 1.96e-9 | -1.48e-10 | 1.79e-10 |
이번 장에서는 2장에서 구성한 가시성 분석 시뮬레이션을 바탕으로, 달 궤도 환경에서의 GNSS 신호 가시성 및 특성에 대한 정량적인 분석 결과를 제시한다. 먼저 달 궤도에서 관측되는 가시 위성 수를 분석하고, 이를 통해 신호 가용성의 수준을 평가한다. 이어서 달 환경에서 수신된 GNSS 신호의 캐리어 대 잡음비 등 정량적인 신호 특성을 분석함으로써, 이후 위치결정 성능 분석을 위한 기초적인 특성을 정리한다.
ELFO 달 위성 궤도의 주기성과 지구-달 간의 상대 위치 변화는 가시 위성 수의 시간에 따른 변동에 직접적인 영향을 미친다. Fig. 10은 Case 1에서 시간에 따른 가시 위성 수를 나타낸다. 전반적으로 모든 위성군을 합산하여 10개 이상의 신호가 수신 가능함을 알 수 있으며, 그래프의 피크 지점을 분석하였을 때 ELFO 궤도와 GNSS 위성군 궤도의 12시간 주기성이 가시 위성 수 변화에 반영된 것을 확인할 수 있다. Fig. 10의 total 가시위성 수 그래프를 보았을 때 대략 12시간을 간격으로 작은 피크 지점과 큰 피크 지점이 반복되는 것을 확인할 수 있다. 또한 지구, 달, 위성 간의 상대 위치에 따라 1시간 내외의 LOS 차폐구간이 주기적으로 발생함을 확인하였다. 위성군 별로 살펴보면 GPS 위성군이 가장 많은 가시 위성 수를 제공하였고 Galileo와 QZSS 위성이 조금 더 낮은 기여도를 보였다. 이는 GPS 위성의 개수와 궤도면이 더 많고 전반적인 송신 전력 및 안테나 게인 수치가 더 높은 데서 비롯된 것으로 해석할 수 있다.
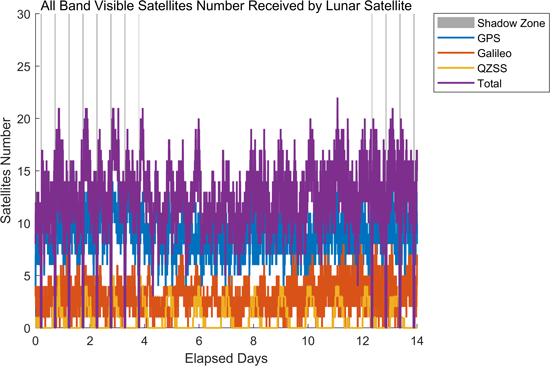
Fig. 10. Number of visible satellites over time in Case 1.
다음으로 동일한 궤도 및 기하 조건 하에서 주파수 대역에 따라 신호 가시성이 어떻게 달라지는지를 분석하였고 Figs. 11, 12에는 Case 1에 대해 주파수 별로 가시 위성 수 그래프를 제시하였다. L1/E1 대역에서는 평균 8.77개, L5/E5 대역에서는 평균 8.16개의 가시 위성 수가 나타나 두 주파수 간 신호 가시성이 비슷한 수준임을 확인했다. GPS Block IIR과 IIRM은 L5 대역을 방송하지 않기 때문에 두 주파수 대역 간 13기의 송출위성 수 차이가 있다. 그럼에도 두 대역에서 비슷한 수의 신호를 획득한 것은 L5/E5 대역의 3가지 특징을 통해 설명할 수 있다. 첫째, 낮은 주파수를 가지고 있어 자유 경로 손실이 적다. 자유 경로 손실 ($L_{free}$)은 전자기파 신호가 장애물 없는 자유 공간을 통과하며 거리가 멀어짐에 따라 에너지를 잃는 현상으로 주파수의 크기에 반비례하는 특징을 가진다 (Eq. 5). L1/E1 대역 (1575.42 MHz)에 비해 L5/E5 대역 (1176.45 MHz)은 약 400 MHz 낮은 주파수를 가지고 있고 이에 신호의 자유 경로 손실이 적어 상대적으로 우수한 가시성을 가지게 된다. 둘째, 위성체가 L5/E5 대역에 할당하는 송출 전력의 비중이 L1/E1 대역에 비해 높기 때문에 달까지 도달하는 신호의 세기가 더 강하게 유지된다. Table 6을 통해 확인 가능하듯이 GPS, QZSS 위성들은 L5에 송출 전력의 세기를 크게 할당하며, 이는 거리가 먼 달 환경까지 신호가 상대적으로 강하게 유지되는 이유가 된다. 셋째, 더 넓은 메인 로브 안테나 빔폭을 가지고 있기 때문에 강한 메인 로브 신호가 달 환경에서 수신되는 비율이 더 높고 사이드로브 감쇄 폭이 적다. GNSS 위성들은 Isoflux 형태의 안테나 패턴을 가지는 것이 일반적이다. 이는 지표면으로 비교적 일정한 세기의 신호를 전송하기 위함이며, Fig. 13에서 볼 수 있듯 보어사이트 방향으로부터 살짝 떨어진 지점에 피크 게인 지점이 위치한다. 위성체와 지구 표면의 서로 다른 지점 사이의 거리 차이를 안테나 이득으로 보상해서, 어디서 받든 신호의 세기가 고르게 보이도록 하는 것이다. 이러한 Isoflux 형태의 안테나 패턴 특징이 두 주파수 대역에 대해 다르게 나타나며, 가시성 분석 결과에 영향을 미친다. Figs. 13과 14 (NAVCEN 2026)는 각각 GPS Satellite Vehicle Number (SVN) 62번의 L1, L5 대역의 송신 안테나 패턴을 보여준다. L1 대역은 L5 대역에 비해 상대적으로 peak gain이 높고 메인 로브 빔폭이 좁은 안테나 게인 패턴의 특징을 확인할 수 있다. 반면 L5 대역의 안테나 게인 패턴은 peak gain이 상대적으로 낮지만 L1 대역에 비해 메인 로브의 빔폭이 넓고 사이드 로브에서의 신호 세기 감쇠가 비교적 덜 한 것을 볼 수 있다. 결론적으로, 메인 로브의 빔폭이 넓은 동시에 사이드 로브에서의 신호 감쇠가 적다는 L5 대역 송출 안테나의 특징은 사이드 로브 신호의 수신 비중이 높은 달 환경에서 유리하게 작용한다고 분석할 수 있다.
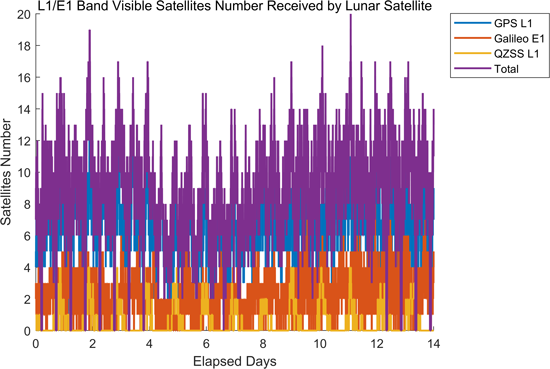
Fig. 11. Number of visible satellites in the L1/E1 band over time in Case 1.
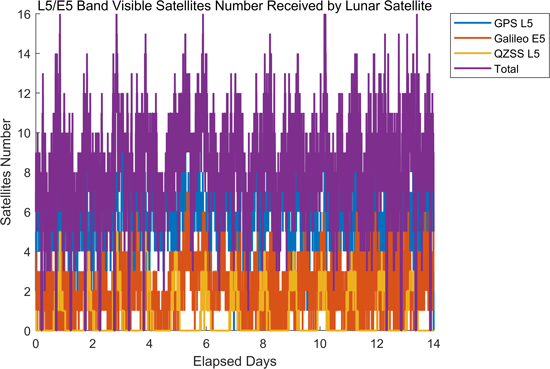
Fig. 12. Number of visible satellites in the L5/E5 band over time in Case 1.
Fig. 13. GPS SVN 62 L1 band antenna gain pattern.
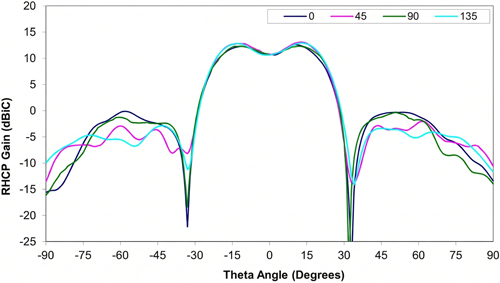
Fig. 14. GPS SVN 62 L5 band antenna gain pattern.
주파수 대역의 차이는 시간에 따른 가시 위성 수의 경향성에서도 차이를 만든다. Fig. 11에 나타난 바와 같이, L1 대역의 가시 위성 수는 특정 구간에서 일시적으로 감소하는 경향이 나타나는 반면, L5 대역의 가시 위성 수는 비교적 일정한 수준을 유지한다 (Fig. 12). 이런 차이는 두 대역의 주파수 차이에 따른 자유 경로 손실의 영향으로 해석할 수 있다. Fig. 15는 L1 대역의 가시 위성 수 변화와 함께 달-지구 간 거리를 도시한다. 시뮬레이션 기간 지구와 달 사이의 거리는 약 2만 km 이상 변화하며, 최대 40만 km 이상 지구와 멀어지게 되는데, 달-지구 간 거리 변화가 가시 위성 수에 반영되어 일시적으로 가시성 저하가 발생하는 것을 확인할 수 있다. 이를 통해 L5 신호가 가시성이 열악한 우주 환경에서 보다 안정적으로 활용될 수 있음을 확인하였다.
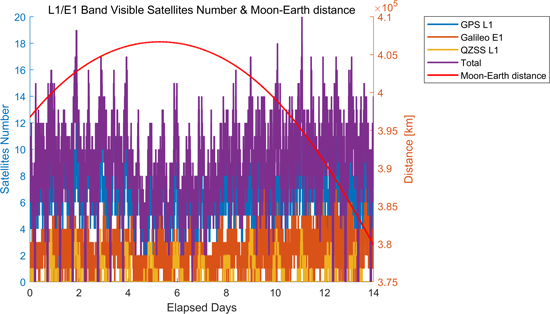
Fig. 15. Number of visible satellites in the L1/E1 band & distance between the Moon and the Earth.
Case 1은 단순 신호 추적 가능 여부를 기준으로 한 것이다. 그러나 GNSS를 단독으로 이용하는 항법의 관점에서는 신호 추적뿐만 아니라 유효한 항법 메시지의 복조 여부 역시 중요하다. 이에 따라 항법 메시지 복조 여부를 고려한 Case 3에 대한 가시성을 분석하였다. Fig. 16은 Case 3에서의 시간에 따른 가시위성 수를 나타낸다. 항법 메시지 복조를 위해 요구되는 충분한 세기의 캐리어 대 잡음비와 연속성 있는 수신 시간 확보라는 조건에 의해 가시위성 수가 감소하였으며, Case 1에서 모든 주파수 대역 합산 평균 12.31개의 가시위성을 확보된 반면, Case 3에서는 평균 5.50개의 가시위성이 확보되어 가시위성 수가 약 55% 감소한 것으로 확인되었다. 이러한 결과는, GNSS 단독 측위를 수행할 경우 신호 가용성이 크게 저하될 수 있으며, 그로 인해 연속적인 위치 결정에 제약이 생길 수 있음을 보여준다.
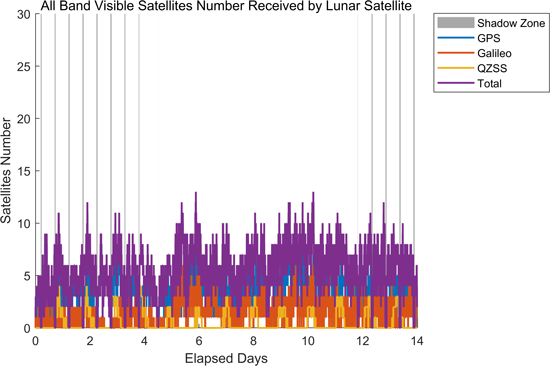
Fig. 16. Number of visible satellites over time in Case 3.
달 위성의 안테나 모드에 따른 영향은 Case 1과 Case 2를 비교하여 알아볼 수 있다. Fig. 17은 Case 2에서의 시간에 따른 가시위성 수를 보여준다. 해당 결과에서 가용 가능한 위성의 수가 크게 감소한 것을 확인할 수 있으며, 다른 케이스에 비해 음영구간이 현저히 늘어난 것이 관찰된다. 이는 안테나의 보어사이트 방향이 항상 지구 중심 방향을 가리키지 않기 때문으로, 이 경우 신호가 안테나의 사이드 로브 방향으로 입사하는 경우가 빈번하게 발생해 수신 안테나 이득이 저하되어 가시위성 수가 감소했다고 해석할 수 있다. 안테나 보어사이트 방향과 위성에서 지구 중심으로 향하는 벡터가 이루는 각을 ‘지구 방향 각’으로 정의하여 가시위성 수의 경향성을 추가로 분석했다. Fig. 18은 지구 방향 각과 가시위성 수를 함께 나타낸다. 위성의 궤도 운동에 따라 각도가 주기적으로 변화하며, 각도가 90°에 가까워지는 구간에서 가시위성 수가 급감하는 경향을 확인할 수 있다. 이러한 경향성은 신호 세기가 전반적으로 열악한 달 환경에서 안테나의 지향성이 가시성 확보에 큰 영향을 미치고 지구 방향으로 지향하는 자세 제어가 GNSS 신호 가용성을 유지하는데 중요한 요소임을 알려준다.
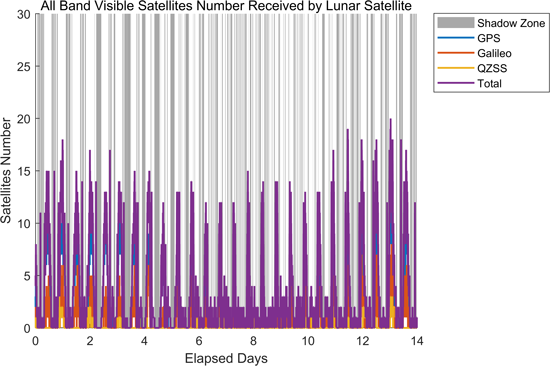
Fig. 17. Number of visible satellites over time in Case 2.
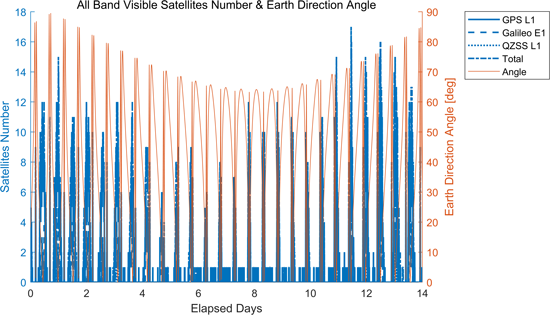
Fig. 18. Number of visible satellites & Earth direction angle.
Table 11은 시뮬레이션을 바탕으로, 케이스별 평균 가시위성 수를 위성군 및 주파수 대역별로 정리한 결과를 나타낸다. Case 1에서는 모든 위성군을 합산했을 때 L1/E1 대역에서 8.77개, L5/E5 대역에서 8.16개의 가시위성이 확보되어 가장 높은 신호 가시성을 보였다. 반면 항법 메시지 공급 방식과 안테나 지향 조건이 가장 보수적으로 설정된 Case 4에서는 가시위성 수가 두 대역에서 모두 1개 미만으로 감소하였고 이를 통해 GNSS 단독 운용의 한계와 안테나 제어 방식의 중요성을 확인할 수 있었다.
Table 11. Average number of visible satellites over 14 days in ELFO orbit.
| No. | GPS | Galileo | QZSS | All constellations | ||||
|---|---|---|---|---|---|---|---|---|
| L1 | L5 | E1 | E5 | L1 | L5 | L1/E1 | L5/E5 | |
| Case 1 | 6.05 | 5.39 | 2.18 | 2.04 | 0.55 | 0.72 | 8.77 | 8.16 |
| Case 2 | 1.37 | 1.57 | 0.44 | 0.54 | 0.06 | 0.19 | 1.86 | 2.30 |
| Case 3 | 1.57 | 2.77 | 0.56 | 1.39 | 0.24 | 0.46 | 2.37 | 4.61 |
| Case 4 | 0.32 | 0.56 | 0.05 | 0.26 | 0.01 | 0.04 | 0.39 | 0.86 |
다음으로 전체 시뮬레이션 기간 중 GNSS 신호를 이용하여 위치 결정을 수행할 수 있는 시간의 비율을 계산하여 신호 가용성을 평가하였다. Least squares 기반 위치 결정을 가정한다면 수신기의 3차원 위치와 시계 오차를 동시에 추정하기 위해 동시에 4개 이상의 GNSS 위성이 필요하며, 이러한 경우를 위치결정 가능 상태로 정의하였다. 케이스별, 위성군별, 주파수별 신호 가용성 결과는 Table 12에 정리되어 있다.
Table 12. GNSS signal availability over 14 days in ELFO orbit [%].
| No. | GPS | Galileo | QZSS | All constellations | ||||
|---|---|---|---|---|---|---|---|---|
| L1 | L5 | E1 | E5 | L1 | L5 | L1/E1 | L5/E5 | |
| Case 1 | 88.62 | 87.53 | 15.30 | 12.43 | 0.99 | 3.12 | 95.07 | 95.71 |
| Case 2 | 18.02 | 19.36 | 2.45 | 1.71 | 0 | 0.13 | 21.06 | 25.01 |
| Case 3 | 4.16 | 28.94 | 0.22 | 4.95 | 0 | 0.52 | 21.53 | 72.00 |
| Case 4 | 0.16 | 2.00 | 0 | 0.20 | 0 | 0 | 1.24 | 7.79 |
Case 1의 경우 GPS를 중심으로 높은 신호 가용성이 확보되었으며, 다중 위성군을 활용한 경우 L1/E1 대역 기준 95.07%, L5/E5 대역 기준 95.71%로 가장 우수한 성능을 보였다. 반면 Case 2, Case 3에서는 GPS의 기여도가 크게 감소하였으며, Galileo 및 QZSS의 기여가 제한적임을 확인할 수 있다. Case 4의 경우 대부분의 위성군 및 주파수 대역에서 신호 가용성이 거의 확보되지 않았고 다중 위성군을 활용하더라도 최대 7.79% 수준에 그쳐 극히 제한적인 항법 성능을 가지는 것을 확인하였다.
달 환경은 GNSS 신호를 수신하기에 매우 열악하며, 달 위성에 탑재될 수 있는 수신기의 성능은 제한적이다. 때문에 달까지 도달되는 신호의 품질에 대한 분석을 통해 항법 성능을 평가하였고 수신된 신호 표본이 가장 많은 Case 1에 대한 분석을 수행하였다. Fig. 19는 GPS 위성이 송출한 L1 대역 신호의 캐리어 대 잡음비 값을 나타낸다. 위성의 송신 안테나가 달 방향을 지향할 시 일시적으로 메인 로브 신호가 수신되어 30 dB-Hz 이상의 높은 캐리어 대 잡음비를 가지는 경우가 존재하지만 이 경우 짧은 시간 안에 지구에 차폐되어 신호가 가시하지 않으며 GNSS 위성과 달 위성 간의 상대 운동으로 인해 빠르게 신호 품질이 다시 저하됨을 확인할 수 있다. Fig. 20은 시뮬레이션 기간 동안 수신된 GNSS 신호의 캐리어 대 잡음비 분포를 히스토그램으로 나타낸 것이다. 평균 21.41 dB-Hz, 표준편차 5.44 dB-Hz의 분포를 보였으며, 중앙값은 19.89 dB-Hz 그리고 하위 95% 분위수는 15.50 dB-Hz로 집계되었다. 신호의 캐리어 대 잡음비 값 분석을 통해 달 환경에서 대략 20 dB-Hz 내외의 미약 신호가 수신됨을 확인하였고 달 환경에 적합하도록 미약 신호 처리에 용이한 달 전용 GNSS 수신기 개발이 필요함을 알 수 있다.
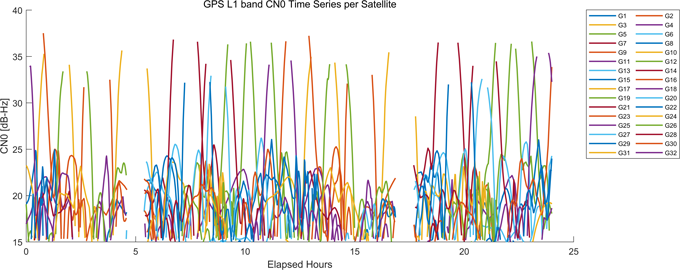
Fig. 19. Carrier-to-noise ratio of the GPS L1 signal.
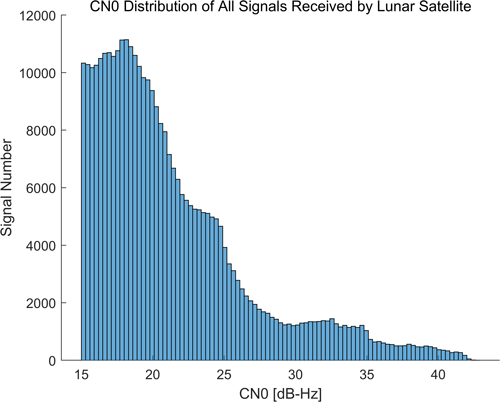
Fig. 20. Distribution of the carrier-to-noise ratio of received GNSS signals.
다음으로 앞서 분석한 캐리어 대 잡음비의 분포 특성의 원인을 이해하기 위해 수신된 GNSS 신호의 오프 보어사이트각을 분석하였다. 오프 보어사이트 각은 GNSS 위성 송신 안테나의 보어사이트 방향 (지구 중심 방향)과 신호의 방사 방향 사이의 각으로 정의되며, 송출 신호의 메인 로브 및 사이드 로브를 구분하는 기하학적 요소이다. Fig. 21은 시뮬레이션 기간 수신된 신호의 오프 보어사이트 각 분포를 히스토그램으로 나타낸 것이다. 높은 오프 보어사이트 각에서는 송신 안테나 게인이 급격히 감소하여 수신 가능한 신호의 수가 매우 제한적이며, 낮은 오프 보어사이트 각의 신호는 대부분 지구 표면에 차폐된다. 이러한 이유로 수신된 GNSS 신호의 오프 보어사이트 각은 대략 30°~40° 사이에서 높은 분포를 보이는 것으로 나타났다. 오프 보어사이트 각에 따라 신호가 메인 로브에서 기인했는지 혹은 사이드 로브에서 기인했는지를 판별할 수 있으며, 그 경계각은 Table 13에 제시되어 있다. 분석 결과 L1 대역에서는 모든 위성군을 합산하여 84.83%의 신호가 사이드 로브에서 기인한 것으로 나타났으며, L5 대역에서는 76.45%의 신호가 사이드 로브에서 기인한 것으로 나타났다. 이러한 결과는 달 궤도와 같은 서비스 공간에서 GNSS 신호의 상당 부분이 사이드 로브를 통해 수신됨을 보여주며, 향후 GNSS 기반 서비스 영역을 달까지 확장하기 위해서는 송신 안테나의 사이드 로브 특성에 대한 정밀한 이해가 필수적임을 시사한다.
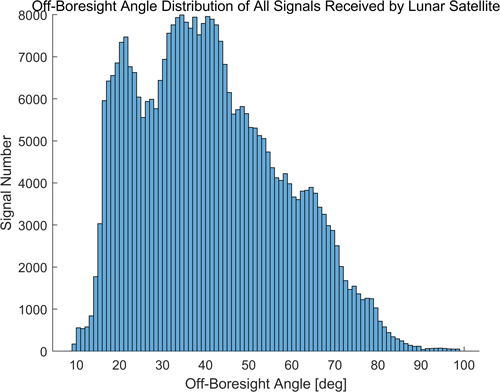
Fig. 21. Distribution of off-boresight angles of received GNSS signals.
Table 13. Main lobe/side lobe boundary angle [degree] and side lobe signal ratio [%].
| Constellation | L1/E1 | L5/E5 | ||
|---|---|---|---|---|
| Boundary angle | Side lobe ratio | Boundary angle | Side lobe ratio | |
| GPS | 23.5 | 87.76 | 24 | 90.40 |
| Galileo | 20.5 | 82.65 | 23.5 | 69.31 |
| QZSS | 22 | 61.06 | 24 | 57.55 |
| Total | 84.83 | 76.45 | ||
이번 장에서는 시뮬레이션을 통해 생성한 GNSS 측정치를 활용하여 달 궤도 위성의 위치결정 성능 분석 결과를 제시한다. Least squares 기반 측위 시뮬레이션을 수행하였으며, 수신된 신호의 캐리어 대 잡음비를 측정 가중치로 적용하였다. 또한 QZSS 위성군이 위치결정 성능에 미치는 영향을 정량적으로 평가함으로써, Regional Navigation Satellite System (RNSS) 위성군의 항법 기여도를 예측하였다. 이를 통해 향후 구축될 RNSS 위성군이 달 항법 성능 향상에 미칠 수 있는 영향을 분석하고자 한다.
Table 14에는 케이스별 Least squares 측위 결과가 제시되어 있다. 측위 오차에 대한 통계 분석은 최대값, RMS 값, 95백분위수, 최소값을 기준으로 수행하였다. 여기서 95백분위 수는 전체 오차 표본을 오름차순으로 정렬했을 때 하위 95%에 해당하는 오차 값으로, 전체 측위 결과 중 대부분의 시간에서 보장되는 오차 수준을 의미한다. 위치 결정 시뮬레이션 결과, 신호 품질이 열악하고 지구 방향으로 치우쳐진 위성 기하로 인해 GNSS 측정치를 단독으로 사용한 위치 결정은 사실상 활용이 불가능하다고 해석할 수 있다. Fig. 22는 신호 가용성이 가장 높은 Case 1에서의 시간에 따른 PDOP 값을 나타낸다. 시간에 따른 가시위성 수의 변동이 PDOP에 반영되어, 대부분의 경우 PDOP 값이 500 내외로 유지되지만 가시위성 수가 적어질 때 순간적으로 급증하는 경향이 나타난다. 달 환경의 특수성에 의해 PDOP 값이 수백 이상으로 높게 유지되며, 이로 인해 항법 메시지와 측정치의 작은 오차 요인도 위치 결정 과정에서 크게 증폭된다. Fig. 23은 같은 조건에서의 시간에 따른 위치 결정 오차를 나타낸 그래프이다. 수십 미터 수준의 user equivalent range error가 열악한 위성 기하로 인해 적게는 수 km에서 많게는 100 km 이상 위치 결정 오차로 반영되는 현상을 확인할 수 있다. 달 궤도 환경에서 나타나는 이러한 근본적인 한계는, 단순 측정치 기반의 위치결정 기법만으로는 충분하지 않으며, 궤도 동역학을 결합한 확장 칼만 필터의 적용의 필요성을 뒷받침한다.
Table 14. Positioning errors [km] and PDOP for each case.
| No. | Max | RMS | 95% | Min | Mean PDOP |
|---|---|---|---|---|---|
| Case 1 | 147.88 | 10.32 | 20.37 | 0.018 | 508.33 |
| Case 2 | 448.79 | 22.54 | 25.32 | 0.0059 | 1120.94 |
| Case 3 | 694.10 | 25.83 | 41.03 | 0.011 | 1843.20 |
| Case 4 | 358.37 | 33.48 | 66.47 | 0.025 | 2887.99 |
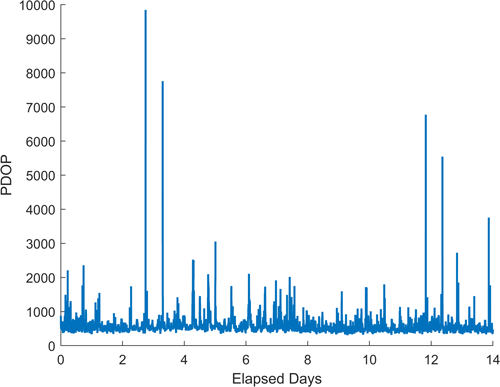
Fig. 22. PDOP over time in Case 1.
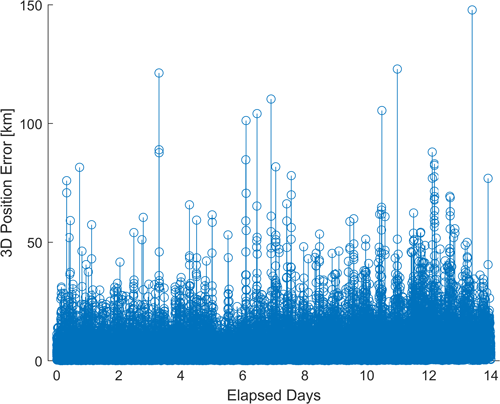
Fig. 23. Three-dimensional positioning error over time in Case 1.
지역 위성 항법 시스템은 지표면 상의 특정 지역에 지속적인 항법 서비스를 제공하기 위해 구축된 위성 시스템으로, 주로 정지궤도(GEO) 또는 정지경사궤도(IGSO) 위성으로 구성된다. 현재 운용 중인 대표적인 지역 위성 항법 시스템으로는 일본의 QZSS와 인도의 NAVIC이 있으며, 향후 한국의 KPS가 구축될 예정이다. 이러한 위성들은 공전 주기가 지구 자전 주기와 동기화되어 있어 달 환경에서 지속적인 신호 가용성이 확보되기 어렵다는 한계가 있다. 그럼에도 불구하고, 신호 환경이 열악한 달 궤도에서 간헐적으로 수신되는 지역 위성 항법 시스템의 측정치는 신호 가용성 향상 및 위치 결정 정밀도 개선 측면에서 의미 있는 기여를 할 수 있다. 이 연구에서는 QZSS 위성군이 가시위성 수, 신호 가용성, PDOP, 3차원 위치 오차의 항목에 대해 어느정도 개선 효과를 줄 수 있는지 분석하였다.
Table 15에는 케이스별 QZSS 위성군의 기여도에 대해 정리하였다. 가시 위성 수는 두 주파수 대역에 대해 합산하여 분석하였으며, 동일 위성에서 L1과 L5 신호가 동시에 수신되는 경우에도 이를 2개가 아닌 1개의 가시 위성으로 집계하였다. 즉, L1 또는 L5 중 하나 이상의 주파수 대역에서 신호가 수신되면 해당 위성을 가시 위성 1기로 처리하였다. 신호 가용성 또한 동일한 기준으로 산정하였으며, 이러한 정의를 바탕으로 주파수 대역별 중복 집계를 배제하고 실제 기하학적 가시성 관점에서의 위성 수를 평가하였다. Table 15의 결과를 보면, QZSS 위성군을 포함한 경우 평균 가시 위성 수와 신호 가용성은 모든 케이스에서 전반적으로 증가하는 경향을 보인다. 이는 지역 위성 항법 시스템의 추가가 기하학적 가시성을 보완하고, 달 궤도 환경에서 단절 구간을 완화하는 데 기여함을 의미한다. 그러나 PDOP 및 3차원 위치 오차 측면에서는 일부 케이스에서 성능 저하가 관찰되는 경우도 확인된다. 이는 단순 측정치 기반의 단일 에포크 측위에서는 QZSS 추가가 곧바로 위치 정확도 향상으로 이어지지 않음을 시사한다. 다만 신호 가용성의 증가는 후처리 기반 항법, 보정정보 활용 항법, 또는 필터 기반 연속 추정 기법(EKF 등)과 결합될 경우 전반적인 항법 성능 개선으로 이어질 잠재력이 크다고 해석할 수 있다.
Table 15. Contribution of the QZSS constellation to navigation performance by case.
| No. | Mean visible satellite number | Signal availability [%] | Mean PDOP | 3D RMS position error [km] | ||||
|---|---|---|---|---|---|---|---|---|
| With QZSS | Without QZSS | With QZSS | Without QZSS | With QZSS | Without QZSS | With QZSS | Without QZSS | |
| Case 1 | 12.31 | 11.42 | 96.80 | 96.76 | 508.33 | 556.75 | 10.32 | 10.91 |
| Case 2 | 3.20 | 2.98 | 28.50 | 27.68 | 1120.94 | 1080.98 | 22.54 | 19.67 |
| Case 3 | 5.50 | 4.99 | 83.83 | 79.13 | 1843.20 | 2096.53 | 25.83 | 26.35 |
| Case 4 | 1.03 | 0.98 | 11.95 | 11.00 | 2887.99 | 2894.19 | 33.48 | 33.14 |
이 연구에서는 현실적인 송수신 안테나 게인 패턴과 사이드 로브 특성을 반영하여 달 궤도 환경에서의 GNSS 신호 가시성을 분석하고, 이를 기반으로 항법 성능을 정량적으로 예측하였다. 항법 메시지 공급 방식과 안테나 제어 방식에 따라 케이스를 구분하고, 다양한 오차 요인을 고려함으로써 실제 임무 환경에 근접한 시뮬레이션 환경을 구성하였다. 하다마드 분산 모델을 이용하여 원자시계의 바이어스 및 드리프트를 모사하였으며, 캐리어 대 잡음비에 따른 수신기 열잡음을 측정치에 반영하였다. 또한 항법 메시지에 포함된 주기성 궤도 오차 및 시계 오프셋 오차를 고려하여, 방송 궤도 및 시계 정보의 불확실성이 달 환경에서의 측위 성능에 미치는 영향을 함께 분석하였다.
시뮬레이션 결과, 항법 메시지의 공급 방식과 안테나 제어 방식 모두 항법 성능에 지배적인 영향을 미치는 것으로 나타났다. 미약한 신호 세기와 열악한 위성 기하라는 달 환경의 근본적인 제약으로 인해 위치 결정 오차가 많게는 수백 킬로미터 수준까지 증폭될 수 있음을 확인하였으며, 단일 에포크에서 측정치 기반으로 위치를 결정하는 방식은 현실적인 운용 관점에서 한계가 있음을 확인하였다. 이는 보정 정보와 궤도 동역학을 결합한 확장 칼만 필터 기반의 연속 측위 방식이 달 항법 환경에서 필수적임을 시사한다. 또한 이 연구에서는 기존 연구에서 상대적으로 다루어지지 않았던 지역 위성 항법 시스템 (RNSS)의 기여도를 정량적으로 평가하였다. 측위 정확도 측면에서의 직접적인 개선 효과는 제한적이었으나, 열악한 달 환경에서 신호 가용성의 증가는 후처리 기반 항법, 보정 정보 활용, 필터 기반 연속 측위와 결합될 경우 전반적인 항법 성능 향상으로 이어질 가능성이 있음을 확인하였다.
이 연구는 향후 궤도 동역학 모델을 포함한 필터 기반 궤도 결정 구조로 확장되어, 달 독자 항법 시스템 아키텍처 구축을 위한 기초 자료로 활용될 수 있을 것으로 기대된다.
This work was partly supported by the Institute of Information & Communications Technology Planning & Evaluation (IITP)-Information Technology Research Center (ITRC) grant funded by the Korea government (MSIT) (IITP-2025-RS-2024-00437494, 50%), the National Research Foundation of Korea (NRF) and Unmanned Vehicle Advanced Research Center (UVARC)- Unmanned Vehicles Core Technology Research and Development Program (2020M3C1C1A01086407, 25%) grant funded by the Ministry of Science and ICT, and the Future Space Navigation & Satellite Research Center (RS-2022-NR067078, 25%) funded by Korea AeroSpace Administration (KASA) the Republic of Korea.
All the authors have contributed to the presented work. The first author, J.O. wrote and edited this based on the analysis results. S.K. performed verification of the analysis algorithm and confirmed the results. B.P. suggested the original concept of this research and supervised the direction of the research.
The authors declare no conflict of interest.
Blunt, P., Botteron, C., Capuano, V., Ghamari, S., Rico, M., et al. 2016, Ultra-high sensitivity state-of-the-art receiver for space applications, NAVITEC 2016.
Cabinet Office (CAO), Japan 2021, Quasi-Zenith Satellite System interface specification (IS-QZSS-PNT-004). https://sys.qzss.go.jp/dod/en/archives/pnt.html
Cabinet Office (CAO), Japan 2023, QZSS satellite antenna pattern data. https://qzss.go.jp/en/technical/antenna-patterns.html
Cabinet Office (CAO), Japan 2026, QZSS almanac data. https://sys.qzss.go.jp/dod/en/archives/pnt.html
Delépaut, A., et al. 2020, Use of GNSS for lunar missions and plans for lunar in-orbit development, Advances in Space Research. https://doi.org/10.1016/j.asr.2020.05.018
Delépaut, A., Minetto, A., & Dovis, F. 2024, Code-based differential GNSS ranging for lunar orbiters, Remote Sensing. https://doi.org/10.3390/rs16152755
Donaldson, J. E., et al. 2020, Characterization of on-orbit GPS transmit antenna patterns for space users, Navigation. https://doi.org/10.1002/navi.361
European Space Agency (ESA) 2024, ESA’s Moonlight programme: Pioneering the path for lunar exploration. https://www.esa.int/…Moonlight_programme
European GNSS Service Centre (GSC) 2025, Galileo almanac data. https://www.gsc-europa.eu/gsc-products/almanac
Fantinato, S., et al. 2025, Moon GNSS positioning, ION GNSS+ 2025.
Goh, E., et al. 2021, Scheduling the NASA Deep Space Network with deep reinforcement learning. https://arxiv.org/abs/2102.05167
Gramling, C., et al. 2025, Towards LunaNet lunar augmented navigation service (LANS) interoperability, SpaceOps 2025. https://ntrs.nasa.gov/citations/20250003163
Hrbek, S. J., Won, D. H., & Akos, D. M. 2016, Power Characterization for L1 and L5 Transmissions, ION ITM 2016. https://doi.org/10.33012/2016.13468
International Space Exploration Coordination Group (ISECG) 2024, Global exploration roadmap 2024. https://www.globalspaceexploration.org
Joint Research Centre (JRC) 2024, Galileo Reference Antenna Pattern Model. https://joint-research-centre.ec.europa.eu/…antenna-pattern-model_en
Kaplan, E. D. & Hegarty, C. J. 2006, Understanding GPS: Principles and applications (2nd ed.).
Kang, M., Jeong, H., Park, J., & Kee, C. 2025, Design of Navigation Satellite Constellation for Global Lunar PNT, ION ITM 2025. https://doi.org/10.33012/2025.19987
Kim, S., Oh, J., & Park, B. 2025a, Predicted orbit determination performance of a lunar navigation system, ION ITM 2025. https://doi.org/10.33012/2025.20027
Kim, S., Oh, J., Park, B., Park, H., & Joo, J.-M. 2025b, EKF-based orbit determination simulation for a lunar satellite, JPNT. https://doi.org/10.11003/JPNT.2025.14.3.241
Kim, S. & Park, B. 2023, A strategy for initial orbit determination of lunar navigation satellite, ION GNSS+ 2023. https://doi.org/10.33012/2023.19375
Kim, S. & Park, B. 2024, GNSS signal tracking analysis and satellite orbit determination based on EKF, APISAT 2024. https://search.informit.org/…/10.3316/informit.T2025031300020690688200217
Konitzer, L., et al. 2024, Science objectives and investigations for the Lunar GNSS Receiver Experiment (LuGRE), ION GNSS+ 2024. https://doi.org/10.33012/2024.19711
Lee, J., Jo, Y., Kim, D., & Park, B. 2025, Technical analysis of DFMC SBAS message structure, JPNT. https://doi.org/10.11003/JPNT.2025.14.2.119
Long, A. C. 2024, GEONS mathematical specifications (NASA/TP-20240004259). NASA NTRS Link
Marquis, W. A. & Reigh, D. L. 2015, The GPS Block IIR and IIR-M Broadcast L-band Antenna Panel, Navigation. https://doi.org/10.1002/navi.123
Montenbruck, O., et al. 2015, GNSS satellite geometry and attitude models, Advances in Space Research. https://doi.org/10.1016/j.asr.2015.06.019
Menzione, F., Sgammini, M., & Paonni, M. 2024, Reconstruction of Galileo constellation antenna pattern, JRC Report. https://doi.org/10.2760/765842
NASA 2021, LunaNet: Empowering Artemis with communications and navigation interoperability. NASA Link
NASA 2024, Moon to Mars architecture: Executive overview. https://www.nasa.gov/architecture
NASA 2025, Moon missions (NASA Science). https://science.nasa.gov/moon/missions/
NAVCEN 2026, GPS broadcast antenna pattern data. https://www.navcen.uscg.gov/gps-technical-references
Parker, J. J. K., et al. 2022, The Lunar GNSS Receiver Experiment (LuGRE), ION ITM 2022. https://doi.org/10.33012/2022.18199
Wang, T., et al. 2018, Characterization of GPS L1 EIRP: Transmit power and antenna gain pattern, ION GNSS+ 2018. https://doi.org/10.33012/2018.16101
Winternitz, L. B., et al. 2017, GPS Navigation Above 76,000 km for NASA’s MMS Mission, Navigation. https://doi.org/10.1002/navi.198
Won, J. H., et al. 2012, Trade-Off Between Data Rate and Signal Power Split in GNSS Signal Design, IEEE TAES. https://doi.org/10.1109/TAES.2012.6237591