Hyung-Seok Lee1![]() , Kwan-Dong Park1,2†
, Kwan-Dong Park1,2†![]()
1Department of Geoinformatic Engineering, Inha University, Incheon 22212, South Korea
2PPSOL Inc, Seoul 08504, South Korea
†Corresponding Author: Kwan-Dong Park, E-mail: kdpark@inha.ac.kr
Citation: Lee, H.-S. & Park, K.-D. 2026, A Methodology for Generating LEO Doppler Observation Data Using TLE and MATLAB, Journal of Positioning, Navigation, and Timing, 15, 93-99.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2026 March, Volume 15, Issue 1, pages 93-99. https://doi.org/10.11003/JPNT.2026.15.1.93
Received on Jan 30, 2026, Revised on Feb 19, 2026, Accepted on Feb 25, 2026, Published on Mar 15, 2026.
Copyright © The Institute of Positioning, Navigation, and Timing
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Recent positioning technologies utilizing low Earth orbit (LEO) satellites are being actively studied as a promising complement to the limitations of Global Navigation Satellite Systems (GNSS). However, since Positioning, Navigation, and Timing (PNT) data for LEO satellites are not publicly available, existing approaches typically require specialized receivers or high-fidelity simulators. Their applications thus may be constrained by costs or research environment limitations. This study proposes a Doppler observation modeling approach based solely on publicly available Two-Line Element (TLE) data and MATLAB built-in functions, without requiring dedicated receivers or high-fidelity simulators. The proposed method is validated through least-squares-based Doppler positioning. A performance evaluation was conducted using 10 minutes of simulated Doppler data from Starlink LEO satellites, with the Gamaksan Observatory as the reference point. The proposed method achieved a 3D Root Mean Square Error (RMSE) of 4.3 m when more than 400 LEO satellites were utilized. As the number of available satellites decreased, the positioning error increased to 5.5 m with approximately 100 satellites and further to 9.8 m when only approximately 20 satellites were used. In comparison, GPS satellite-based Doppler positioning resulted in a 3D RMSE of 146.3 m. This large difference in RMSE demonstrates the superior performance of LEO-based Doppler positioning.
LEO, Doppler, TLE, MATLAB
최근 Low Earth Orbit (LEO) 위성을 활용한 위치결정 기술이 Global Navigation Satellite System (GNSS)의 한계를 보완할 수 있는 대안으로 주목받고 있다 (Yang et al. 2024b). GNSS는 신호 교란에 취약하며, 도심이나 실내 환경과 같은 열악한 수신 조건에서 위치 결정의 신뢰도가 크게 저하된다 (Li & Hwang 2025). 반면 LEO 위성은 2,000 km 이하의 낮은 고도에서 운용되므로, 상대적으로 더 높은 수신 신호 세기를 제공할 수 있다. Ferre et al. (2022)은 시뮬레이션을 통해 LEO 위성 신호가 GPS 신호 대비 실외에서 최대 16.9 dB/Hz, 실내에서 최대 6.2 dB/Hz의 높은 C/N₀를 보임을 확인하였다.
그러나 현재 LEO 위성에 대한 Positioning, Navigation, Timing (PNT) 목적의 데이터는 존재하지 않으며, 대부분의 LEO 위성은 통신이나 지구 관측 목적으로 운용되고 있다. 또한 민간 기업에서 운용하는 Starlink, OneWeb, Iridium과 같은 통신 목적의 LEO 위성군은 신호 구조, 변조 방식, 중심 주파수 등의 정보가 제한적으로 공개되어 있다 (Humphreys et al. 2023, Kassas et al. 2024). 이에 따라 기회 신호 (Signals of Opportunity) 기반의 상용 통신 위성 신호를 활용한 위치 결정 기법이 대두되고 있다 (Stock et al. 2025).
Farhangian & Landry (2020)은 Multi-Constellation Software-Defined Receiver (MC-SDR)을 설계하여 단방향 하향링크 신호를 사용하는 Iridium-Next 위성 1기와, 연속 신호를 송신하는 Orbcomm 위성 2기에서 도플러 편이를 추출하였고, 이를 활용하여 정적 수신기를 대상으로 약 132 m의 위치 결정 정확도를 달성하였다. Yang et al. (2023)은 동적 항법 환경에서 LEO 통신 위성 기회 신호의 활용 가능성을 분석하고, LEO 위성 도플러 위치 결정 방정식을 제안하였다. Yang et al. (2024a)는 LEO 위성의 제한된 가시성으로 도플러 단독 위치 결정이 어려운 문제를 해결하기 위하여 Round Trip Time (RTT)를 결합한 도플러 위치 결정 기법을 제안하였다. 또한 Allahvirdi-Zadeh et al. (2025)는 광대역 LEO 위성 군집을 활용한 기회 신호 기반의 위치 결정 가능성을 분석하였다. 해당 연구에서는 다양한 주파수 대역에서 관측된 다중 위성군으로부터의 도플러 편이 관측 데이터를 기반으로 절대 위치 결정 모델을 개발하였으며, 위치 결정 정확도는 4.32 m를 달성하였다. Khalife et al. (2022)은 Starlink LEO 위성 신호를 이용한 반송파 위상 추적 및 위치 결정 기법을 최초로 제안하였다. 해당 연구에서는 6기의 Starlink 위성에 대한 반송파 위상 추적에 성공하였으며, 이를 기반으로 수행한 위치 결정 결과 수평 위치 오차는 7.7 m 수준으로 나타났다.
한편, 상용 GNSS 시뮬레이터를 확장하거나 자체 시뮬레이터를 개발하여 LEO 위성을 활용한 위치 결정 기법을 연구한 사례도 존재한다. Guo et al. (2023)은 288기의 LEO 위성에 대한 도플러 편이를 시뮬레이션 하였고, 이를 기반으로 위치를 결정하여 3 m 수준의 오차를 보였다. 또한 Ranaivoharison et al. (2025)는 Safran의 Skydel 시뮬레이터를 활용하여 GNSS 및 LEO 위성의 신호, 궤도, 환경 교란을 정밀하게 모델링 하였으며 다양한 PNT 성능 지표를 평가하였다. Lee et al. (2025)는 GNSS 시뮬레이터를 확장하여 한국형 LEO PNT 성능 분석과 항법 신호 생성을 지원하는 시뮬레이터를 제안하였으며, 사용자가 정의한 가상 LEO 위성군을 대상으로 기하학적 구조 및 도플러 효과 관점의 성능 분석을 수행하였다.
이러한 기법을 연구하고 검증하기 위해서는 실제 LEO 위성 신호를 수신할 수 있는 장비나 고정밀 시뮬레이터가 필요하지만, 모든 조건을 갖추기에는 비용이나 연구 환경의 측면에서 상당한 제약이 따른다. 따라서 본 연구에서는 별도의 수신기나 시뮬레이터 없이, 공개된 Two Line Element (TLE) 데이터와 MATLAB의 내장 함수만을 활용하여 수신기 위치 정보를 포함한 가상 도플러 관측 데이터를 생성하는 방법을 제안하고, 위치 결정 알고리즘에 적용하여 데이터의 효용성을 검증한다.
2장에서는 가상의 도플러 관측 데이터 모델링 기법 및 도플러 위치 결정 알고리즘을 설명하고, 3장에서는 생성된 도플러 데이터의 유효성 검증 결과 및 활용 사례를 제시한다. 마지막으로 4장에서는 분석 결과와 향후 연구 방향을 논의한다.
이번 장에서는 본 연구에서 제안하는 MATLAB 기반의 도플러 위치 결정 알고리즘을 다룬다. 2.1절에서는 위성의 위치 및 속도 계산과 도플러 편이 모델링 기법을 설명하며, 2.2절에서는 위치 결정 기법에 대하여 기술한다.
위성의 위치와 속도는 TLE 데이터의 궤도 요소와 TLE의 기준이 되는 시점 및 위치 결정 시점 간의 시간 차이를 MATLAB의 states 함수에 입력하여 추정할 수 있다. 해당 함수는 Simplified General Perturbations 4 (SGP4) 모델을 활용하여 위성 궤도를 추정하며, 이는 주요 섭동 효과, 지구 자전 및 대기 저항 등 궤도 운동에 영향을 미치는 요인을 고려한다. 또한 해당 함수는 기본적으로 True Equator, Mean Equinox (TEME) 좌표계에서의 위성 위치 및 속도를 출력하는데, 위치 결정을 위해 입력 파라미터를 조정하여 Earth-Centered, Earth-Fixed (ECEF) 좌표계로 출력되도록 설정하였다.
또한 TLE 데이터를 Satellite 함수에 입력하여 위성 객체를 생성하고, 위치 결정 시간 정보를 satelliteScenario 함수에 입력하여 위성 시나리오를 구성할 수 있으며, 지상 수신기의 위치 정보를 GroundStation 함수에 입력하여 관측소 객체를 생성할 수 있다. 이렇게 생성한 객체 및 시나리오와 특정 주파수를 dopplershift 함수에 입력하면 위성과 수신기 간의 상대적 기하 배치에 기반한 Hz 단위의 도플러 편이 관측 데이터를 모델링할 수 있다. 앞서 언급한 함수는 모두 MATLAB 내장 함수이며, 이러한 흐름을 정리한 플로우 차트는 Fig. 1과 같다.
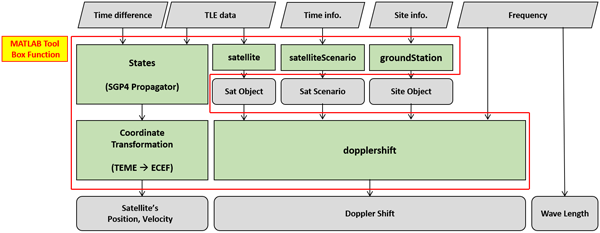
Fig. 1. Flowchart of satellite position and velocity computation and Doppler shift modeling.
모델링한 도플러 편이와 실제 도플러 관측 데이터 간의 유사성을 정량적으로 평가하기 위해 상관계수 분석을 수행하였다. 실제 데이터는 국내 IGS 관측소인 감악산 (GMAG) 관측소에서 2025년 7월 8일 정오부터 10분간 취득한 관측 Receiver Independent Exchange Format (RINEX)의 GPS 위성 도플러 관측 데이터로 구성하였으며, 비교 대상으로 사용한 가상 데이터는 MATLAB 함수를 이용하여 모델링한 도플러 관측 데이터로 구성하였다. 본 연구에서는 전리층과 대류권 지연에 따른 오차를 고려하지 않았기 때문에, 실제 관측 데이터와 가상의 관측 데이터 간의 바이어스는 크게 나타날 수 있다. 이에 따라 바이어스의 영향을 배제하고 두 데이터 간의 경향 유사성을 평가하기 위해, 정규화 과정을 거친 도플러 관측 데이터를 기반으로 상관 계수를 계산하였다. 정규화 과정과 상관계수 계산 식은 각각 Eqs. (1, 2)에 제시하였으며, 상관 계수 분석 결과는 Table 1에 정리하였다. 또한 상관계수가 가장 높게 나타난 G04 위성을 대상으로 정규화 과정 및 상관 계수 계산 결과를 Fig. 2에 그래프로 나타냈다.
$$x_{norm}=\frac{x-x_{min}}{x_{max}-x_{min}}$$
$$Correlation=\frac{cov(real,virtual)}{\sigma_{real}\sigma_{virtual}}$$
Table 1. Correlation coefficient results between real and virtual data for 10 GPS satellites.
| PRN | Correlation |
|---|---|
| G02 | 0.9997 |
| G04 | 0.9999 |
| G06 | 0.9998 |
| G17 | 0.9998 |
| G18 | 0.9998 |
| G19 | 0.9999 |
| G24 | 0.9996 |
| G27 | 0.9999 |
| G28 | 0.9997 |
| G30 | 0.9998 |
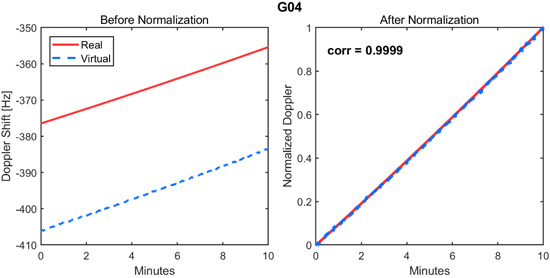
Fig. 2. Correlation coefficient after normalization for G04.
분석 결과, 가상의 도플러 관측 데이터는 실제 도플러 관측 데이터와 높은 상관성을 보였다. Table 1에 제시된 바와 같이, 모든 위성에 대해 산출된 상관 계수는 1에 근접한 값으로 나타났으며, 이는 모델링 된 도플러 편이가 실제 관측 데이터와 높은 유사성을 가짐을 의미한다. 또한 Fig. 2에서 두 데이터를 정규화 한 후 시계열 변화를 비교한 결과, 도플러 편이의 변동 패턴에서 유의미한 차이는 관찰되지 않았다. 이를 통해 MATLAB 기반으로 모델링한 도플러 관측 데이터가 실제 관측 특성을 충분히 반영하고 있음을 확인하였다. 따라서 해당 모델을 통해 생성된 가상 도플러 관측 데이터는 도플러 기반 위치 결정 성능 분석을 위한 입력 데이터로 활용 가능함을 확인하였다.
위치 결정은 비선형 최소 제곱을 기반으로 수행하는데, 해당 과정에서 사용하는 도플러 위치 결정 관측 방정식은 Eq. (3)과 같다 (Park 1999).
$$-\lambda f_{d}=\hat{\rho}^{T}(V^{s}-V_{r})+c\cdot dt+\dot{\epsilon} \quad \ (dt=\dot{\delta}t^{s}-\dot{\delta}t_{r})$$
여기서 $\lambda$는 위성 신호의 파장을, $f_d$는 위성 신호의 주파수 변화량인 도플러 편이를 의미한다. $\hat{\rho}^{T}$는 위성과 수신기 간의 시선 방향을 나타내는 단위 벡터의 전치이며, $V^s$와 $V_r$는 각각 위성과 수신기의 속도를 나타낸다. $\dot{\delta}t^{s}$와 $\dot{\delta}t_{r}$는 각각 위성과 수신기의 시계 드리프트이며, 두 값의 차이를 $dt$로 정의하였다. 여기서 수신기와 위성 간의 시계 드리프트 차이를 추정하는 이유는, TLE 데이터가 위성의 시계 오프셋 및 시계 드리프트 정보를 제공하지 않기 때문이다. 또한, $\dot{\epsilon}$는 잔여 오차의 시간 변화율을 의미한다.
이번 장에서는 본 연구에서 제안한 도플러 모델링 방법으로 생성된 가상 데이터를 위치 결정 알고리즘에 적용하여 유효성을 검증한다. 3.1절에서는 알고리즘 검증에 사용한 데이터 취득 및 처리 방법을 설명하고, 3.2절에서는 효용성 검증 결과를 기술한다. 3.3절에서는 LEO 및 GPS 위성의 도플러 위치 결정 성능을 비교하며, 3.4절에서는 LEO 위성 수에 따른 위치 결정 성능을 비교한다.
본 연구에서는 알고리즘 효용성 검증과 위치 결정 성능 비교를 위한 데이터를 취득하였다. Crustal Dynamics Data Information System (CDDIS)에서 7월 8일 정오부터 10분간 대한민국 감악산 관측소의 관측 RINEX와 항법 궤도력을 취득하였으며, 동일한 시점의 GPS 위성 TLE 데이터를 North American Aerospace Defense Command (NORAD) Celes Track Archive에서 취득하였다. 또한 위치 결정 성능 비교를 위하여 NORAD Celes Track Archive에서 2025년 7월 8일 Starlink 위성의 TLE 데이터를 취득하여 정오부터 10분간 위성 위치를 계산하였으며, Starlink 위성의 주파수는 Ku-Band에 해당하는 12.7 GHz로 설정하였다. 감악산 관측소의 위치 및 안테나 주변 환경을 Fig. 3에 표시하였다.

Fig. 3. Location and surrounding environment of the GAMG site.
앞서 기술한 방법으로 취득한 데이터를 활용하여 알고리즘의 효용성을 검증하였다. 감악산 관측소의 관측 RINEX에 기록된 GPS 위성 도플러 관측 데이터를 실제 (real) 데이터로 설정하고, 2.1절에서 제안한 도플러 모델링 방법으로 생성한 데이터를 가상 (virtual) 데이터로 설정하여, 각각을 이용한 도플러 위치 결정 결과를 비교하였다. 수평 방향 오차 분포 및 수평, 수직 방향 시계열 오차 변화를 Fig. 4에 표시하였으며, Root Mean Square Error (RMSE), 오차 평균 (mean) 및 평균 값이 RMSE에서 차지하는 비율 (rate)을 계산하여 Table 2에 표시하였다.
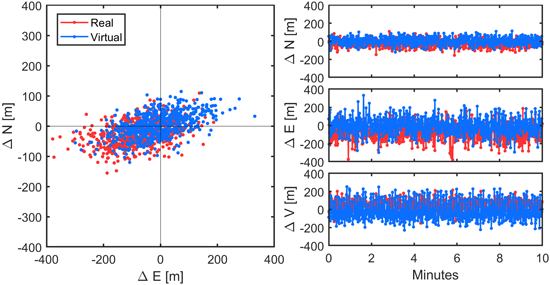
Fig. 4. Positioning error scatter plot and time series for real and virtual GPS data.
Table 2. Horizontal, vertical and 3D RMSE from real and virtual GPS data.
| Doppler data | Real | Virtual | ||||
|---|---|---|---|---|---|---|
| $\Delta\text{H}$ | $\Delta\text{V}$ | $\Delta\text{3D}$ | $\Delta\text{H}$ | $\Delta\text{V}$ | $\Delta\text{3D}$ | |
| RMSE (m) | 129.3 | 75.1 | 149.5 | 101.4 | 105.5 | 146.3 |
| Mean (m) | 109.9 | 44.8 | 131.0 | 86.9 | -15.5 | 133.3 |
| Rate (%) | 72.4 | 35.6 | 76.8 | 71.5 | 2.1 | 81.6 |
각 데이터를 사용하여 위치 결정을 수행한 결과, 수평 및 수직오차에서는 약 30 m 크기의 RMSE 차이를 보이지만 3D RMSE는 유사한 수준이며, 오차의 분포 및 시계열 그래프 양상 또한 매우 유사하다.
오차 평균은 RMSE에 포함된 바이어스 성분을 의미하며, 수평 방향에서 오차 평균이 RMSE에서 차지하는 비율은 실제 및 가상 데이터를 사용한 경우 모두 유사하게 나타났다. 반면, 수직 방향에서는 실제 데이터를 사용한 경우에 비해 가상 데이터를 사용한 경우 해당 비율이 더 낮게 나타났다. 이는 가상 데이터를 사용한 경우 대기권 오차를 고려하지 않기 때문에, 수직 오차 성분에서 바이어스가 차지하는 비중이 상대적으로 작은 것으로 판단된다.
2.1절의 실제 데이터와 가상 데이터 간 유사성 검증 및 본 절의 효용성 검증 결과를 고려할 때, 도플러 모델링을 통해 생성한 가상 데이터는 도플러 위치 결정에 활용될 수 있음을 확인하였다.
본 연구에서 제안한 알고리즘을 기반으로 LEO 위성과 GPS 위성의 가상 도플러 편이 관측 데이터를 모델링하였고, 이를 활용하여 감악산 관측소에서 10분간 위치 결정을 수행한 결과를 비교하였다. 먼저 위치 결정에 사용된 위성 수 및 PDOP를 Fig. 5에 나타내었다.
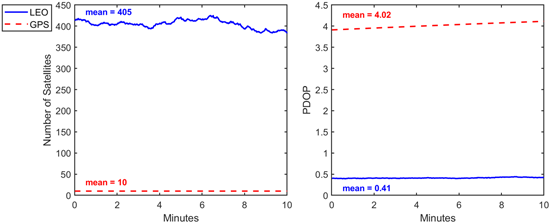
Fig. 5. Difference in the number of satellites and PDOP between GPS and LEO.
평균적으로 사용된 LEO 위성 수는 405개이며, GPS 위성 수는 10개이다. LEO 위성이 상대적으로 많이 사용되었으므로 PDOP 또한 0.41로, GPS를 사용한 경우의 4.02에 비하여 매우 낮게 나타났다. 이에 따른 도플러 위치 결정 결과의 수평 오차 분포 및 시계열 오차 변화는 Fig. 6에 나타냈고, RMSE와 오차 평균 및 평균 값이 RMSE에서 차지하는 비율을 계산하여 Table 3에 제시하였다.
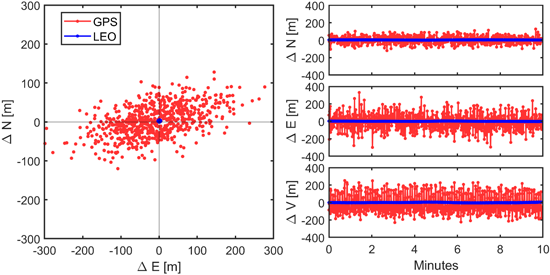
Fig. 6. Horizontal, vertical positioning errors from GPS and LEO.
Table 3. Horizontal, vertical and 3D RMSE from GPS and LEO.
| Satellite | GPS | LEO | ||||
|---|---|---|---|---|---|---|
| $\Delta\text{H}$ | $\Delta\text{V}$ | $\Delta\text{3D}$ | $\Delta\text{H}$ | $\Delta\text{V}$ | $\Delta\text{3D}$ | |
| RMSE (m) | 101.4 | 105.5 | 146.3 | 3.7 | 2.3 | 4.3 |
| Mean (m) | 86.9 | -15.5 | 133.3 | 3.5 | -0.5 | 4.2 |
| Rate (%) | 71.5 | 2.1 | 81.6 | 88.6 | 4.3 | 92.8 |
GPS 위성을 사용한 경우, 추정된 위치 오차가 넓게 분산되어 있어 정밀도가 매우 낮은 반면, LEO 위성을 활용한 경우에는 추정된 위치 오차가 높은 정밀도를 보임을 확인할 수 있다. 또한 수평 및 수직 오차의 시계열 분석 결과에서도 GPS 대비 LEO 위성을 활용한 경우 더 낮은 오차 수준을 유지하며, 정확도와 정밀도 모두에서 우수한 성능을 보였다.
Table 3에 제시된 RMSE 결과를 보면, GPS 위성을 사용한 경우 수평 및 수직 오차가 모두 100 m 이상으로 나타난 반면, LEO 위성을 활용한 경우에는 수평 및 수직 오차가 모두 4 m 이내로 감소하였다. 3차원 위치 오차 역시 LEO 위성을 활용한 경우가 GPS 대비 140 m 이상 개선된 것으로 확인되었다. 동일한 위치 결정 기법을 적용한 조건에서, LEO 위성은 GPS 위성에 비해 이동 속도가 빠르고 수신기와의 상대 운동이 크기 때문에 도플러 편이 변화율이 크게 나타난다. 또한 위성과 수신기 간의 기하 구조가 시간에 따라 빠르게 변화하여 관측 기하가 개선되며, 이는 도플러 관측 데이터의 정확도를 증가시키는 요인으로 작용한다. 이러한 결과는 LEO 위성을 활용한 도플러 위치 결정이 GPS 위성 기반 도플러 위치 결정에 비해 정확한 위치 결정 성능을 제공할 수 있음을 의미한다.
한편, RMSE를 구성하는 오차 평균 비율을 분석한 결과, LEO 위성을 사용한 경우 GPS 위성을 사용한 경우에 비해 모든 방향에서 해당 비율이 증가하였다. 특히 수직 방향에 비해 수평 방향에서 비율 차이가 더 크게 나타났는데, 이는 저궤도 위성의 빠른 기하학적 변화로 인해 발생한 위성 위치 및 속도 추정 오차가 수평 오차 성분에 상대적으로 크게 반영된 결과로 판단된다.
가용 가능한 LEO 위성 수는 시간에 따라 변화하며, 항상 400개 이상의 위성을 사용할 수 있는 것은 아니므로, 위성 수에 따른 도플러 위치 결정 성능 변화를 분석할 필요가 있다. 이에 따라 LEO 위성 수에 따른 위치 결정 결과를 비교하기 위하여 위성 수를 약 20개, 100개 및 400개 이상으로 구분하였으며, 위성 기하 배치에 따른 PDOP를 Fig. 7에 표시하였다.
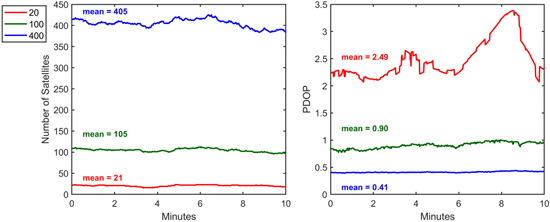
Fig. 7. PDOP variation according to the number of LEO satellites.
평균 405개의 위성을 사용한 경우 PDOP는 0.41로 가장 낮았으며, 105개를 사용한 경우에도 0.90으로 1 이하의 값을 보였다. 21개의 위성을 사용한 경우 PDOP는 2.49로 가장 높게 나타났으나, 이는 3.1절에 제시된 GPS 위성을 사용한 경우의 PDOP인 4.02보다 낮은 값이다. 위성 수에 따른 위치 결정 결과를 각각 오차 분포와 시계열 그래프로 Fig. 8에 나타내었으며, RMSE와 오차 평균 및 평균 값이 RMSE에서 차지하는 비율을 계산하여 Table 4에 표시하였다.
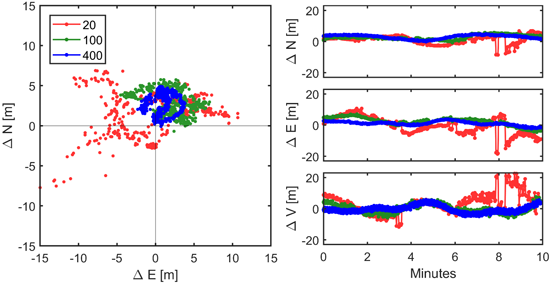
Fig. 8. Horizontal, vertical positioning errors versus the number of LEO satellites.
Table 4. Horizontal, vertical, and 3D RMSE versus the number of LEO satellites.
| # of sat. | 20 | 100 | 400 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| $\Delta H$ | $\Delta V$ | $\Delta 3D$ | $\Delta H$ | $\Delta V$ | $\Delta 3D$ | $\Delta H$ | $\Delta V$ | $\Delta 3D$ | |
| RMSE (m) | 6.4 | 7.4 | 9.8 | 4.7 | 2.8 | 5.5 | 3.7 | 2.3 | 4.3 |
| Mean (m) | 5.6 | 3.6 | 8.5 | 4.4 | -0.2 | 5.3 | 3.5 | -0.5 | 4.2 |
| Rate (%) | 76.9 | 24.1 | 75.2 | 89.9 | 0.3 | 93.8 | 88.6 | 4.3 | 92.8 |
400개 이상의 위성을 사용한 경우 모든 방향에서 위치 결정 정확도가 가장 높게 나타났다. 100개 이상의 위성을 사용한 경우에는 정확도가 다소 낮아졌으나, 약 5 m 수준을 보였다. 반면, 약 20개의 위성을 사용한 경우 모든 방향에서 위치 결정 정확도가 가장 낮았지만 10 m 이내의 정확도를 유지하였으며, 이는 GPS 위성을 사용한 경우보다 우수한 결과이다. 이에 따라 위성 수에 관계없이 LEO 위성을 활용한 도플러 위치 결정의 높은 정확도를 확인하였다.
한편, 오차 평균이 RMSE에서 차지하는 비율을 위성 수 변화에 따라 분석한 결과, 위성 수와 관계없이 수직 방향에 비해 수평 방향의 바이어스 비율이 크게 나타나는 경향을 확인하였다. 이는 TLE 기반 궤도 정보의 부정확성이 주로 수평 오차 성분에 반영되며, 수직 오차에 영향을 미치는 대기권 모델을 적용하지 않았기 때문으로 판단된다.
본 연구는 시뮬레이터와 수신기의 부재 환경에서 MATLAB만을 활용한 LEO 위성 기반의 도플러 위치 결정 알고리즘을 제안하였다. 이를 검증하기 위해 GPS 위성을 기준으로 실제 및 가상의 도플러 관측 데이터를 사용하여 위치 결정을 수행하였으며, LEO 위성과 GPS 위성의 도플러 위치 결정 성능 및 LEO 위성 수에 따른 위치 결정 성능 변화를 비교하였다.
모델링한 도플러 관측 데이터를 활용하여 LEO 위성 기반의 도플러 위치 결정을 수행한 결과, 실제 도플러 관측 데이터를 이용한 위치 결정 결과와 유사한 성능을 보였다. 또한 LEO 위성과 GPS 위성을 이용한 도플러 위치 결정 성능을 비교한 결과, 3차원 위치 오차의 RMSE는 GPS를 사용한 경우 146.3 m, LEO 위성 약 400개를 사용한 경우 4.3 m로 나타났으며 위성 수가 적어질수록 위치 결정 성능은 저하되었으나 약 20개를 사용한 경우에도 10 m 이내의 정확도를 유지하였다. 이는 LEO 위성이 GPS 위성에 비해 훨씬 빠른 속도로 이동함에 따라 더 큰 도플러 편이가 발생하기 때문이며, 이에 따라 LEO 위성이 도플러 기반 위치 결정에 특히 적합함을 확인하였다.
본 연구는 고가의 수신기나 시뮬레이터를 사용하지 않고도 LEO 위성의 도플러 편이 데이터를 모델링할 수 있는 방법론을 제시하였다. 제안된 기법은 비교적 간단한 절차를 통해 도플러 관측 데이터를 생성할 수 있으므로, 특정 운용 환경에서 LEO 위성을 활용한 도플러 기반 위치결정 성능을 사전에 분석하고 초기 성능 분석을 수행하는 데 유용하게 활용될 수 있다. 따라서 본 연구에서 제시한 방법은 향후 실제 관측 기반 실험이나 시스템 설계 및 운용 계획 수립 이전 단계에서 기초 검증 도구로 활용될 수 있을 것으로 기대된다.
한편, 본 연구의 한계는 실제 LEO 위성의 정밀 궤도 및 시계 정보를 반영하지 못하였으며, 전리층 및 대류권 지연과 같은 전파 전달 오차 요인을 고려하지 못하였다는 점에 있다. 정밀 궤도 및 시계 정보의 부재는 실제 운용 환경에서 발생할 수 있는 오차 특성을 충분히 반영하지 못한다는 한계를 가지며, 대기권 지연 오차 또한 도플러 관측치에 추가적인 주파수 편이를 유발하여 위치 결정 정확도에 영향을 미칠 수 있다. 따라서 향후 연구에서는 정밀 궤도 및 시계 모델과 함께 대기 지연 모델을 포함한 보다 정교한 오차 모델링을 적용함으로써, 실제 운용 환경을 보다 충실히 반영한 성능 분석이 수행될 필요가 있다.
본 연구는 2026년도 국토교통부의 재원으로 국토교통과학기술진흥원의 지원으로 수행된 연구임 (RS-2022-00141819, 초정밀 디지털 국토정보 획득을 위한 절대, 상대, 연속복합 측위 고도화 기술 개발).
All the authors have contributed to the presented work. H.S. conceived the research idea, designed the research, performed data analysis, and interpreted the results. H.S. also wrote the first draft of the manuscript. K.D. supervised this work and reviewed the manuscript.
The authors declare no conflict of interest.
Allahvirdi-Zadeh, A., El-Mowafy, A., & Wang, K. 2025, Doppler Positioning Using Multi-Constellation LEO Satellite Broadband Signals as Signals of Opportunity, NAVIGATION. https://doi.org/10.33012/navi.691
Farhangian, F., & Landry, R., Jr. 2020, Multi-Constellation Software-Defined Receiver for Doppler Positioning with LEO Satellites, Sensors. https://doi.org/10.3390/s20205866
Ferre, R. M., et al. 2022, Is LEO-based positioning with mega-constellations the answer for future equal access localization?, IEEE Communications Magazine. https://doi.org/10.1109/MCOM.001.2100841
Guo, F., et al. 2023, Instantaneous Velocity Determination and Positioning Using Doppler Shift from a LEO Constellation, Satellite Navigation. https://doi.org/10.1186/s43020-023-00098-2
Humphreys, T. E., et al. 2023, Signal Structure of the Starlink Ku-Band Downlink, IEEE TAES. https://doi.org/10.1109/TAES.2023.326810
Kassas, Z. M., et al. 2024, Ad Astra: Simultaneous Tracking and Navigation with Megaconstellation LEO Satellites, IEEE AES Magazine. https://doi.org/10.1109/MAES.2023.3267440
Khalife, J., et al. 2022, The First Carrier Phase Tracking and Positioning Results with Starlink LEO Satellite Signals, IEEE TAES. https://doi.org/10.1109/TAES.2021.3113880
Lee, H.-J., et al. 2025, Design Extension of a Multi-Satellite, Multi-Frequency GNSS Simulator for Korean LEO PNT Research, 2025 IPNT Conference. https://ipnt.or.kr/2025proc/117
Li, J., & Hwang, S.-H. 2025, Improved GNSS Positioning Schemes in Urban Canyon Environments, IEEE Access. https://doi.org/10.1109/ACCESS.2025.3583347
Park, C.-S. 1999, A method of absolute positioning using GPS Doppler measurement, Telecommunications Review.
Ranaivoharison, R., et al. 2025, Hybrid GNSS/LEO PNT with Safran’s Skydel-Powered GNSS Simulator, 2025 IPNT Conference. https://ipnt.or.kr/2025proc/56
Stock, W., et al. 2025, Survey on Opportunistic PNT With Signals from LEO Communication Satellites, IEEE Communications Surveys & Tutorials. https://doi.org/10.1109/COMST.2024.3406990
Yang, C., et al. 2023, Doppler Positioning of Dynamic Targets with Unknown LEO Satellite Signals, Electronics. https://doi.org/10.3390/electronics12112392
Yang, D. H., et al. 2024a, RTT-Enabled Doppler Positioning in LEO-PNT Systems, JPNT. https://doi.org/10.11003/JPNT.2024.13.3.301
Yang, Y., et al. 2024b, Demand and Key Technology for a LEO Constellation as Augmentation of Satellite Navigation Systems, Satellite Navigation. https://doi.org/10.1186/s43020-024-00133-w