Hyunho Kim1,2![]() , Jihyun Ha1
, Jihyun Ha1![]() , Nam-Woo Noh3
, Nam-Woo Noh3![]() , Kwan-Dong Park1,3,4†
, Kwan-Dong Park1,3,4†![]()
1Department of Geoinformatic Engineering, Inha University, Incheon 22212, Korea
2Smart Spatial Information Division, National Geographic Information Institute, Suwon 16517, Korea
3Department of Electrical and Computer Engineering, Inha University, Incheon 22212, Korea
4PPSOL Inc., Seoul 08504, Korea
†Corresponding Author: Kwan-Dong Park, E-mail: kdpark@inha.ac.kr
Citation: Kim, H., Ha, J., Noh, N.-W., & Park, K.-D. 2026, Development of a Pre-processing Algorithm Using GPS Triple-Frequency Data, Journal of Positioning, Navigation, and Timing, 15, 121-127.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2026 March, Volume 15, Issue 1, pages 121-127. https://doi.org/10.11003/JPNT.2026.15.1.121
Received on Jan 14, 2026, Revised on Feb 05, 2026, Accepted on Mar 05, 2026, Published on Mar 15, 2026.
Copyright © The Institute of Positioning, Navigation, and Timing
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
The National Geographic Information Institute (NGII) is preparing to transition from dual-frequency to triple-frequency GNSS data services by upgrading equipment at 99 Continuously Operating Reference Stations (CORS) in Korea. In response to this transition, this paper proposes an enhanced cycle slip detection algorithm based on a pre-processing algorithm (KPrep1) from previous research to support triple-frequency observations and analyzed its performance. For performance validation, five days of triple-frequency data collected from NGII-operated stations were utilized, and the results were compared with those from RINGO, software developed by the Geospatial Information Authority of Japan (GSI). The comparative analysis showed that the difference in the number of detected cycle slips ranged from a minimum of one to a maximum of six, with an average difference of approximately two. Furthermore, a very high correlation coefficient of 0.98 was observed between the two programs.
GNSS, NGII, cycle slip detection, pre-processing algorithm
Global Navigation Satellite System (GNSS)는 다양한 위치기반서비스, 항법, 시각정보 제공 등 핵심적인 사회기반 시설로 자리매김하고 있다. 특히 Korea Augmentation Satellite System (KASS)와 Korean Positioning System (KPS) 개발에 따라 정밀 항법, 정밀 측위 등 고성능 핵심 기술에 대한 국산화 필요성이 날로 높아지고 있다. 인하대학교와 ㈜피피솔은 2023년부터 GNSS 위성에 대한 Precise Orbit Determination (POD) 국산 프로그램 Kinematic Position and precise Orbit Provider (KPOP) 개발에 착수하였다 (Ha et al. 2023, Kim et al. 2023). KPOP 1차 버전은 POD를 위한 각 단계별 핵심 알고리즘을 구현하고 통합/검증하는데 중점을 두고 있으며, 현재 (2026년 1월 기준) 개발 완료를 앞두고 있다 (Kim et al. 2025b). KPOP은 관측자료 관리, 수치 적분기, 시간계 및 좌표계 정의, 추정 필터, 운동 모델, 관측 모델, 시뮬레이션 및 성능 검증 단계로 구성되어 있으며 (Ha et al. 2023), Kim et al. (2025a)은 KPOP 1차 버전에 탑재된 GPS 이중주파수 기반의 데이터 전처리 알고리즘을 소개한 바 있다.
한편, 국토지리정보원은 우리나라 위치기준체계와 국가기준점을 관리, 운영하고 있는 기관으로써 전국에 99개소의 GNSS 상시관측소를 운영하고 있다 (Fig. 1). 국토지리정보원에서 운영중인 GNSS 상시관측소는 「공간정보의 구축 및 관리 등에 관한 법률」에 따라 국가기준점 중 하나인 위성기준점으로 분류되어 있으며, 기관 홈페이지를 통해 관측데이터 및 품질 평가 결과를 공개하고 있다. 다만 현재 제공하고 있는 관측데이터는 이중주파수기반 일간 RINEX이며, 품질 평가는 Translation, Editing, Quality Checking (TEQC, Estey & Meertens 1999)를 이용하여 데이터 수신율과 다중경로 오차, 그리고 사이클슬립 발생수를 제공하고 있다. 그러나 2019년부터 TEQC 서비스가 중단됨에 따라 RINEX3.x부터는 자료 처리가 불가능한 실정이다. 국토지리정보원은 최근 관측장비 업그레이드를 완료하고 일부 관측소를 대상으로 RINEX3 버전의 삼중주파수 데이터를 수집하는 등 서비스 개편을 준비하고 있다. 따라서 현재 사용하고 있는 품질 평가 서비스를 대체할 알고리즘이 필요한 실정이다.
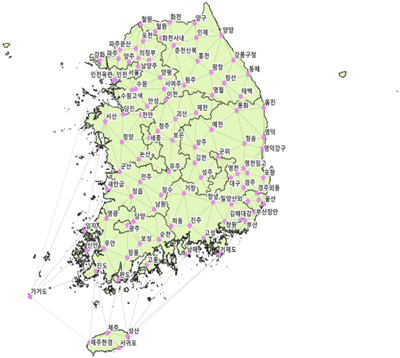
Fig. 1. GNSS CORS of the National Geographic Information Institute (NGII).
이 논문에서는 Kim et al. (2025a)에서 개발한 KPOP 1차 버전의 전처리 알고리즘을 활용하여 이중주파수와 삼중주파수 데이터를 모두 지원할 수 있는 사이클슬립 검출 알고리즘을 개발하였다. 이 논문에서는 알고리즘 버전에 따른 구분을 위해 Kim et al. (2025a)에서 개발된 전처리 알고리즘을 KPOP pre-processing algorithm version 1 (KPrep1), 그리고 이 논문을 통해 개선된 알고리즘을 KPrep2라고 명명한다. 개발 알고리즘의 성능분석을 위해 국토지리정보원 GNSS 상시관측소에서 수집된 삼중주파수 관측데이터를 이용하였으며, 일본 국토지리원 (GSI, Geospatial Information Authority of Japan)에서 개발한 RINEX pre-processing tool using GO (RINGO, Kawamoto et al. 2023)를 이용하여 사이클슬립 검출 결과를 상호 비교하였다.
IGS AC의 자료처리 전략을 살펴보면, GNSS 고정밀 자료처리 시 관측데이터 전처리 과정을 거치며, 이를 통해 이상치 (outlier) 제거 및 시계 점프 (clock jump)와 사이클슬립 검출 및 보정이 이루어진다. 현재까지 개발된 GNSS 데이터 전처리 알고리즘으로는 TEQC 외에도 TurboEdit (Blewitt 1990), ClockPrep (Freymueller 2003), GFZRNX (Nischan 2016), G-Nut/Anubis (Václavovic & Douša 2016), GDP (Chen et al. 2020), RINGO 등이 있으며, IGS AC인 Jet Propulsion Laboratory (JPL), Deutsches Geo Forschungs Zentrum Potsdam (GFZ), Wuhan University (WHU)에서는 TurboEdit를 전처리 프로그램으로 채택하고 있다. RINGO는 2023년 최초 공개된 후 National Science Foundation’s Geodetic Facility for the Advancement of Geoscience (NSF GAGE) 보고서에 채택되는 등 신뢰성을 확보하였으며, 일본 국토지리원(GSI)이 운영하는 상시관측망(GEONET)의 관측데이터 관리와 전처리에 사용되고 있다 (EarthScope Consortium 2023, Kawamoto et al. 2023).
전처리 프로그램에서 사이클슬립을 검출하는 방법은 주파수 조합을 이용한 Hatch-Melbourne-Wübbena (HMW) 조합과 Geometry-Free (GF) 조합이 대표적이며 (Blewitt 1990), 이를 응용한 삼중 주파수기반 Extra Wide Lane (EWL), Wide Lane (WL), 그리고 Narrow Lane (NL) 조합이 있다 (Ban et al. 2024, Feng 2008, Zhao et al. 2015). 삼중주파수 조합은 낮은 고도에 위치한 위성과 전리층 활동 상황에 따른 사이클슬립 검출 성능 저하 문제를 해결하는데 효과적이며, 이중주파수에 비해 보다 안정적인 사이클슬립 검출 성능을 보인다고 알려져 있다 (Feng 2008). 따라서 본 논문에서는 선행 연구에서 개발된 이중주파수 기반의 KPrep1을 이용하여 삼중주파수 기반 사이클슬립 검출 알고리즘을 추가하고, RINGO와 비교하여 사이클슬립 검출 성능을 분석하였다. HMW와 GF 조합을 이용한 사이클슬립 검출 방법은 Kim et al. (2025a)에 기술한바 있으며, 이 논문에서는 Zhao et al. (2015)이 제안한 삼중주파수 기반 사이클슬립 검출 방법에 대해 소개한다.
Zhao et al. (2015)은 EWL, WL, NL 순차적으로 적용하는 방법으로 사이클슬립을 검출 성능을 개선하였다. 삼중주파수 관측데이터를 이용한 관측방정식은 식 (1)과 같다.
$$P_{(i,j,k)} = \rho + k_{1l}I + \epsilon_{P_{(i,j,k)}} \notag$$
$$\phi_{(i,j,k)} = \rho – k_{1l}I – N_{(i,j,k)}\lambda_{(i,j,k)} + \epsilon_{\phi_{(i,j,k)}}$$
여기서 $i$, $j$, $k$는 삼중주파수를 의미하며, $P$와 $\phi$는 주파수 $i$, $j$, $k$에서의 의사거리 관측값과 반송파 위상 관측값이다. $\lambda$는 파장이며, $\rho$는 위성에서 수신기까지의 기하학적 거리를 의미한다. $I$는 전리층 오차, $k_{1l}$는 전리층 스케일 팩터, $\epsilon_{P}$와 $\epsilon_{\phi}$는 잡음오차, $N$은 모호정수이다.
주파수 선형조합에 따른 관측방정식은 식 (2)와 같이 정리할 수 있으며, 반송파 위상 관측값은 식 (3)과 같이 나타낼 수 있다.
$$\phi_{(i,j,k)} = \rho – \beta_{(i,j,k)}I – N_{(i,j,k)}\lambda_{(i,j,k)} + \epsilon_{\phi_{(i,j,k)}}$$
$$\phi_{(i,j,k)} = \frac{if_{1}\phi_{1} + jf_{2}\phi_{2} + kf_{3}\phi_{3}}{if_{1} + jf_{2} + kf_{3}}$$
여기서 $\beta$는 전리층 스케일 팩터이며, $\phi_1$, $\phi_2$, $\phi_3$은 각 주파수($f_1$, $f_2$, $f_3$)에서의 반송파 위상 관측값이다. EWL은 $\phi_{(0,1,-1)}$ 선형조합으로 결정하며, 연속된 두 epoch을 조합하여 기하학적 거리와 대류권 지연, 전리층 지연을 제거하고 미지정수 $\Delta N_{(0,1,-1)}$만 남기게 된다. EWL $\phi_{(0,1,-1)}$은 식 (4)와 같다.
$$\Delta N_{(0,1,-1)} = \Delta N_{2} – \Delta N_{3} = \left( \frac{f_{2}\Delta P_{2} + f_{3}\Delta P_{3}}{f_{2} + f_{3}} – \frac{f_{2}\Delta \phi_{2} – f_{3}\Delta \phi_{3}}{f_{2} – f_{3}} \right) / \lambda_{(0,1,-1)}$$
여기서 $\Delta N_{(0,1,-1)}$ 의 표준편차는 약 0.066 cycle 로, 정규분포로 가정했을 때 0.5 cycle을 임계값으로 설정하면 성공적으로 사이클슬립을 검출할 수 있다 (Zhao et al. 2015). 따라서 KPrep2에서도 $\Delta N_{(0,1,-1)}$의 크기가 0.5 cycle을 초과할 경우 사이클슬립이 발생한 것으로 간주하였으며, 가장 가까운 정수로 반올림하여 미지정수를 결정하였다. EWL 조합에서 사이클슬립이 검출되면, 식 (5)의 WL 조합에 적용한다.
$$\phi_{(0,1,-1)} – \phi_{(1,0,-1)} = N_{(1,0,-1)}\lambda_{(1,0,-1)} – N_{(0,1,-1)}\lambda_{(0,1,-1)} + \eta_{1}$$
여기서 $\eta_1=\beta_{(0,1,-1)}-\beta_{(1,0,-1)}$으로 잔여 전리층 지연 계수이며, 연속된 두 epoch간 조합을 통해 식 (6)과 같이 정리할 수 있다.
$$\Delta N_{(1,0,-1)} = \left( \frac{(\Delta \phi_{(0,1,-1)} – \Delta \phi_{(1,0,-1)}) – \eta_{1}\Delta I + \Delta \hat{N}_{(0,1,-1)}\lambda_{(0,1,-1)}}{\lambda_{(1,0,-1)}} \right)$$
이때, 전리층 항 $\eta_1 \Delta I$는 WL의 파장에 비해 매우 작은 값이므로 무시하며, EWL과 마찬가지로 0.5 cycle을 임계값으로 설정하여 사이클슬립을 검출한다 (Zhao et al. 2015).
NL 조합 $\phi_{(2,-1,0)}$은 WL을 적용하여 식 (7)과 같이 나타낼 수 있다. 여기서 $\eta_2=\beta_{(1,0,-1)}-\beta_{(2,-1,0)}$으로 전리층 지연계수이며, 식 (7)은 연속된 두 epoch 간 조합을 통해 식 (8)과 같이 정리할 수 있다.
$$\phi_{(1,0,-1)} – \phi_{(2,-1,0)} = N_{(2,-1,0)}\lambda_{(2,-1,0)} – N_{(1,0,-1)}\lambda_{(1,0,-1)} + \eta_{2}I$$
$$\Delta N_{(2,-1,0)} = \left( \frac{(\Delta \phi_{(1,0,-1)} – \Delta \phi_{(2,-1,0)}) – \eta_{2}\Delta I + \Delta \hat{N}_{(1,0,-1)}\lambda_{(1,0,-1)}}{\lambda_{(2,-1,0)}} \right)$$
식 (8)에서 $\Delta I$는 전리층지연 변화량으로, 전리층 지연계수 $(\eta_2)$ 1.926을 이용해 보정하며, 임계값 0.5 cycle을 기준으로 사이클슬립 발생 여부를 판단한다 (Zhao et al. 2015). WL과 NL 모두 사이클슬립이 존재한다고 판단되는 경우, $\Delta N_{(1,0,-1)}$과 $\Delta N_{(2,-1,0)}$을 반올림하여 미지정수를 결정한다.
앞서 기술한 바와 같이, 이 논문에서는 Zhao et al. (2015)에서 제안된 삼중주파수기반 사이클슬립 검출 방법을 이용하여 KPrep2를 구현하였다. 3장에서 알고리즘 개발 방법을 설명한다.
TurboEdit와 RINGO 등 GNSS 전처리 알고리즘은 이중주파수 및 삼중주파수 GNSS 관측데이터에 대한 편집, 시계 점프 및 사이클슬립 검출 및 보정 기능을 제공하고 있다. 선행 연구에서 개발된 전처리 알고리즘, 즉 KPrep1은 GPS 이중주파수 관측데이터에 대한 시계 점프 및 사이클슬립 검출과 보정 기능을 갖추고 있으며, 데이터 품질 평가 결과를 바탕으로 정밀 자료 처리에 적합한 관측구간을 검색하고, 편집하는 기능이 탑재되어 있다 (Kim et al. 2025a). 이 논문에서는 KPrep1을 활용하여 삼중주파수 기반의 사이클슬립 검출 기능을 추가 구현하고 그 성능을 RINGO와 비교하였다.
KPrep1은 관측자료 입력 → 관측데이터 편집 → 이상치 검출 및 제거 → 시계 점프 검출 및 보정 → 사이클슬립 검출 및 보정 단계로 구현되어 있다. KPrep2는 KPrep1의 알고리즘 구조는 변경하지 않고 관측데이터 편집 단계에서 입력된 관측데이터의 종류를 구분하여 GPS-only 이중주파수 또는 삼중주파수로 데이터로 편집하도록 하였다 (Fig. 2). 편집된 관측데이터는 이중주파수 관측데이터의 경우 KPrep1 전처리 알고리즘을 적용하며, 삼중주파수 관측데이터의 경우 본 논문에서 개발된 삼중주파수 알고리즘 KPrep2를 이용하게 된다. 각 단계 별 flag는 Kim et al. (2025a)와 동일하며, 지면상 참고문헌으로 대체한다.

Fig. 2. Diagram of KPrep2 GPS data pre-processing algorithm.
이 논문에서 구현된 KPrep2 알고리즘은 GPS L1, L2, L5 주파수를 이용하며, 2장에서 기술한 Zhao et al. (2015)의 EWL, WL, NL기법을 순차적으로 적용하였다. 이 기법은 기하학적 효과와 대기 오차, 그리고 전리층 오차를 효과적으로 제거하고 짧은 파장에서 보다 정밀한 사이클슬립 검출을 가능하게 한다. 만약 EWL이 선행되지 않으면, WL에서 기하학적 성분과 사이클슬립을 구분하기 어렵게 되고, WL을 실행하지 않으면 NL에서 전리층에 의한 영향을 많이 받게 된다. 따라서 이 3가지 조합을 순차적으로 적용할 경우 보다 효과적인 사이클슬립 검출이 가능해지며, 이 경우 99% 수준의 사이클슬립 검출 성공율을 보이는 것으로 알려져 있다 (Zhao et al. 2015).
이중주파수를 이용하여 사이클슬립을 검출할 경우 1-2 cycle 이상의 사이클슬립은 오검출로 판단한다 (Deo & El-Mowafy 2015). 선행 알고리즘인 KPrep1 역시 2 cycle 미만의 사이클슬립은 오검출로 간주하였으며, 2 cycle 이상인 경우에 대해 사이클슬립으로 판단하였다 (Kim et al. 2025a). 이에 반해 Zhao et al. (2015) 알고리즘은 삼중주파수를 이용하여 0.5 cycle 크기의 사이클슬립도 검출이 가능하며, 따라서 KPrep2에서도 0.5 cycle을 임계값으로 적용하여 사이클슬립 검출 알고리즘을 구현하였다.
이 논문에서는 선행 연구에서 개발된 전처리 알고리즘 KPrep1에 삼중주파수 기반 사이클슬립 검출 알고리즘을 추가하여 KPrep2를 개발하였다. 성능 비교를 위해 국토지리정보원의 CHEN(천안)과 CHLW(철원) 관측소에서 수집된 삼중주파수 관측데이터를 이용하였으며, KPrep1과 KPrep2, RINGO를 이용하여 사이클슬립을 검출하고 결과를 비교하였다. 앞서 기술한 바와 같이 국토지리정보원은 현재 이중주파수 관측데이터만 수집, 공개하고 있다. 따라서 이 연구에서 사용된 삼중주파수 관측데이터는 홈페이지에서 공개되고 있지 않은 실험데이터이다. 두 관측소의 모습과 장비 사양을 Fig. 3과 Table 1에 나타내었다. 천안관측소는 Leica GR50 수신기와 LEIAR25.AR 안테나, LEIT 레이돔이 설치되어 있으며, 철원관측소는 Trimble NetR9 수신기와 TRM59800 안테나, SCIS 레이돔이 설치되어 있다. 데이터 수집 기간은 각각 5일씩으로 천안관측소는 2025년 1월 1일~5일(DOY 001~005), 철원관측소는 7월 24일~28일(DOY 205~209)까지이다.

Fig. 3. NGII CORS. (a) CHEN and (b) CHLW.
Table 1. CORS equipment information.
| Antenna | Receiver | Radome | |
|---|---|---|---|
| CHEN | LEIAR25.R4 | LEICA GR50 | LEIT |
| CHLW | TRM59800.00 | TRIMBLE NETR9 | SCIS |
먼저, 두 관측소에서 수집한 삼중주파수 관측데이터를 이용하여 KPrep2와 RINGO로 각각 사이클슬립을 검출하였다. 2025년 7월 24일(YRDOY 25205) 철원 관측소에서 하루동안 검출된 사이클슬립을 Fig. 4에 나타내었다. Fig. 4의 가로축은 시간, Fig. 4a의 세로축은 검출 플래그(미검출=0, 검출=1), Fig 4b의 세로축은 두 프로그램 간 검출 플래그 차이이다. Fig. 4a에서 KPrep2를 이용한 사이클슬립 검출 결과는 파란색 실선, RINGO는 빨간색 실선으로 각각 나타내었다. Fig. 4a를 보면 두 프로그램 간 검출 결과는 대동소이한 것을 알 수 있으며, 두 프로그램 간 검출 플래그 차이(Fig. 4b)는 09시 0분 30초에 1개로 나타났다. 천안과 철원 관측소의 전체 관측기간에 대한 사이클슬립 검출 결과를 Fig. 5, Table 2에 나타내었다. Fig. 5a는 KPrep2와 RINGO를 이용하여 검출된 사이클슬립 수이며, Fig. 5b는 두 알고리즘 간 사이클슬립의 검출 수 차이다. Figs. 5a,b의 가로축은 관측 일수로 각 관측소 별 시작일로부터 1~5일을 순차적으로 표시한 것이다. 세로축은 사이클슬립 수이다. Fig. 5a의 실선은 KPrep2 결과이며, 점선은 RINGO 결과이다. Figs. 5a,b에서 철원은 파란색, 천안은 빨간색으로 표시하였다.
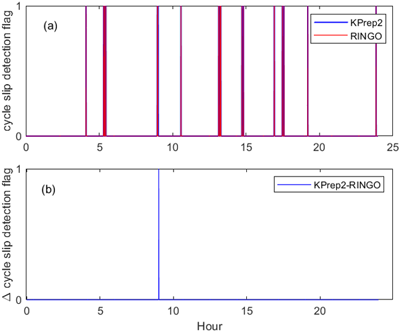
Fig. 4. (a) Cycle slip detection flags and (b) differences in cycle slip detection flags using KPrep2 and RINGO at CHLW station on July 24, 2025.
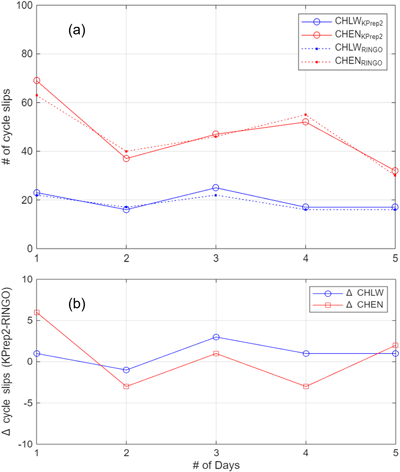
Fig. 5. (a) Number of cycle slips detected by the KPrep2 and RINGO, (b) The difference in the number of detected cycle slips between the KPrep2 and RINGO.
Fig. 5a의 관측소별 사이클슬립 검출 경향을 살펴보면 철원에 비해 천안에서 다소 많은 사이클슬립이 검출된 것을 볼 수 있다. 이러한 경향은 KPrep2와 RINGO에서 동일하게 나타났다. 철원과 천안이 서로 다른 수신기, 안테나, 레이돔으로 구성되어 있는 점을 고려할 때 장비의 특성과 관측 환경에 의한 영향이 복합적으로 작용한 것으로 판단된다. 한편 RINGO와 KPrep2의 사이클슬립 검출 수를 비교했을 때, 두 알고리즘 간 차이는 크지 않은 것을 볼 수 있다. KPrep2와 RINGO의 사이클슬립 검출 수 차이를 보면(Fig. 5b), 두 알고리즘의 사이클슬립 검출 수 차이는 대부분 ±5개 범위에서 나타났으며, 양(+) 혹은 음(-)의 편향은 없는 것으로 나타났다. 사이클슬립 검출 수와 차이를 Table 2에 정리하였다. Table 2를 보면 두 알고리즘은 최소 -3개~ 최대 6개 수준에서 차이가 나타났으며, 평균 0.8개, 절대평균 2.2개의 차이를 보였다. 가장 큰 차이가 나타난 경우는 천안관측소의 첫째 날(YRDOY 25001)로 6개 차이가 났으며, 이 날을 제외하면 모두 1~3개 수준의 근소한 차이를 보였다. 관측소 별 평균차이는 천안 0.6개, 철원 1개, 절대평균은 천안 3개, 철원 1.4개로 나타나 관측소에 무관하게 유사한 검출 성능 달성이 가능함을 확인할 수 있었다. RINGO 검출 수를 참값으로 가정하였을 때 두 알고리즘 간 검출 수 차이는 -8~14%의 비율이며, 평균 3%, 절대평균 7%의 차이를 보였다.
Table 2. Comparison of cycle-slip detection counts between KPrep2 and RINGO using triple-frequency data at CHEN and CHLE stations.
| SITE | DOY | # of cycle slips | KPrep2-RINGO | Diff. ratio (%) | |
|---|---|---|---|---|---|
| KPrep2 | RINGO | ||||
| CHEN | 001 | 69 | 63 | 6 | 10 |
| 002 | 37 | 40 | -3 | 8 | |
| 003 | 47 | 46 | 1 | 2 | |
| 004 | 52 | 55 | -3 | 5 | |
| 005 | 32 | 30 | 2 | 7 | |
| CHLW | 205 | 23 | 22 | 1 | 5 |
| 206 | 16 | 17 | -1 | 6 | |
| 207 | 25 | 22 | 3 | 14 | |
| 208 | 17 | 16 | 1 | 6 | |
| 209 | 17 | 16 | 1 | 6 | |
천안관측소의 YRDOY 25001에 나타난 6개 검출 수 차이는 RINGO의 사이클슬립 검출 수 63개에 비했을 때 10% 수준에 해당하며, 절대평균보다 다소 높은 수치이다. 절대평균보다 높은 차이율을 보인 날은 10일 중 3일로, 천안관측소 YRDOY 25001 외에 25002 8%, 철원관측소 YRDOY 25207 14%가 있다. 이 3일간은 검출 수 차이에서도 절대평균을 초과한다. 심도 있는 원인 분석을 위해 국토지리정보원 관측소를 대상으로 한달 이상 장기간 실험데이터 수집이 가능한 관측소를 선정하고 2025년 12월부터 데이터를 수집하고 있으며, 향후 추가 분석을 수행할 예정이다. 두 알고리즘 간 사이클슬립 상관계수 분석 결과를 Fig. 6에 나타내었다. Fig. 6의 가로축은 KPrep2를 이용하여 검출한 사이클슬립 수이며, 세로는 RINGO 결과이다. Fig. 6을 보면 두 알고리즘으로 산출한 사이클슬립이 두 관측소에서 모두 높은 상관성을 보이며, 상관계수 산출 결과 0.98로 나타났다.
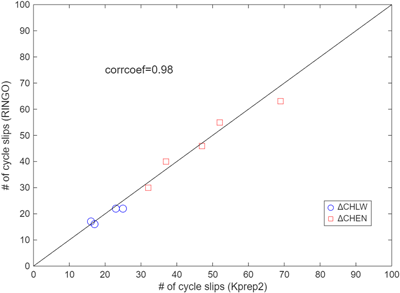
Fig. 6. Correlation of cycle slip detection using KPrep2 and RINGO.
다음으로 가장 큰 차이를 보인 천안관측소를 이용하여 이중주파수 사이클슬립 검출 성능을 비교하였다. 이를 위해 천안관측소의 삼중주파수 관측데이터를 이중주파수로 편집하였으며, KPrep1과 RINGO로 각각 처리하였다. 그 결과를 Table 3에 정리하였다. Table 3의 RINGO 결과는 Table 2와 구분하기 위해 RINGO2F로 표시하였다. Table 3을 보면, 이중주파수 관측데이터를 사용하였을 때 두 알고리즘 간 사이클슬립 검출 성능은 최소 -5개~ 최대 3개 수준에서 차이가 났으며, 평균 -0.6개, 절대평균 2.6개의 차이를 보였다. 가장 많은 차이를 보인 경우는 -5개(YRDOY 25005)로 삼중주파수 결과와는 날짜에 차이가 있으나 절대값에서는 유사한 수치를 보였으며, 이 날을 제외하면 모두 1~3개 수준의 차이를 보였다. 이는 두 알고리즘 간 평균차이과 절대평균, 최대 차이의 절대값이 삼중주파수와 이중주파수 모두 유사하다는 것을 의미한다. 반면, Table 2와 비교했을 때 동일한 관측소의 데이터를 사용하였음에도 불구하고 주파수 조합에 따른 사이클슬립 검출 수에 비교적 큰 차이가 나타난 것을 알 수 있다. KPrep1과 KPrep2는 최소 -3개 ~ 최대 28개까지 차이가 났으며, RINGO는 -10개 ~ 25개의 차이를 보였다. 이와 같은 결과는 두 알고리즘 간 결과 차이는 크지 않으며, L5 관측데이터에 존재하는 사이클슬립의 영향과 주파수 조합 변화에 따른 검출 성능 강화에 따른 결과로 판단된다.
Table 3. Comparison of cycle-slip detection counts and their differences among KPrep1,2 and RINGO at CHEN station.
| SITE | DOY | # of cycle slips | KPrep1- RINGO2F | KPrep2- KPrep1 | RINGO- RINGO2F | |
|---|---|---|---|---|---|---|
| KPrep1 | RINGO2F | |||||
| CHEN | 001 | 41 | 38 | 3 | 28 | 25 |
| 002 | 27 | 29 | -2 | 10 | 11 | |
| 003 | 32 | 33 | -1 | 15 | 13 | |
| 004 | 42 | 40 | 2 | 10 | 15 | |
| 005 | 35 | 40 | -5 | -3 | 10 | |
이 논문에서는 Kim et al. (2025a)에서 개발된 전처리 알고리즘을 이용하여 삼중주파수기반 사이클슬립 검출 알고리즘을 추가하고 RINGO와 비교하여 성능을 분석하였다. Kim et al. (2025a)에서 개발된 전처리 알고리즘을 KPrep1, 그리고 이 논문을 통해 개선된 알고리즘을 KPrep2라고 명명하였다. 국토지리정보원 천안관측소와 철원관측소에서 각각 5일간 실험데이터를 수집하였으며, 이중주파수와 삼중주파수 관측데이터로 편집하여 사이클슬립을 검출하였다. 먼저, 삼중주파수 관측데이터를 이용하여 KPrep2와 RINGO로 각각 사이클슬립을 검출하였다. 그 결과 두 알고리즘의 사이클슬립 검출 수 차이는 대부분 ±5 개 범위에서 관측되었으며 편향은 없는 것으로 나타났다. 두 알고리즘은 최소 -3개~ 최대 6개 수준에서 차이가 나타났으며, 평균 0.8개, 절대평균 2.2개의 근소한 차이를 보였다. 또한 관측소 별 평균 차이는 천안 0.6개, 철원 1개, 절대 평균은 천안 3개, 철원 1.4개로 나타나 관측소에 무관하게 유사한 검출 성능 달성이 가능함을 확인할 수 있었다. 두 알고리즘 간 사이클슬립 상관계수 분석 결과, 상관계수 0.98로 매우 높은 상관성을 보였다. 이와 같은 결과는 이중주파수 관측데이터를 이용한 경우에도 거의 유사한 수준으로 나타났으며, 평균 -0.6개, 절대평균 2.6개의 차이를 보였다. 가장 많은 차이를 보인 경우는 -5개로 KPrep2 최대 차이 절대값에서 유사한 수치를 보였으며, 이 날을 제외하면 이중주파수, 삼중주파수 모두 1~3개 수준의 근소한 차이를 보였다. 이는 두 알고리즘이 평균 차이와 절대 평균, 최대 차이에서 유사한 성능을 달성할 수 있다는 것을 의미하며, 이와 같은 결과를 통해 본 연구에서 개발한 KPrep2이 향후 국토지리정보원의 GNSS 관측데이터 품질 점검 서비스에 활용될 기반을 마련했다는데 의의가 있다. 국토지리정보원은 최근 관측장비 업그레이드를 완료하고 일부 관측소를 대상으로 RINEX3 버전의 삼중주파수 데이터를 수집하는 등 서비스 개편을 준비하고 있다. 따라서 현재 사용하고 있는 TEQC기반의 품질 평가 서비스를 대체하여 안정적인 품질 점검을 통한 고품질의 관측데이터 제공에 기여할 수 있을 것으로 기대된다.
This research was supported by Korea Agency for Infrastructure Technology Advancement grant funded by the Ministry of Land, Infrastructure and Transport (RS2022-00141819, Development of Advanced Technology for Absolute, Relative, and Continuous Complex Positioning to Acquire Ultra-precise Digital Land Information).
Conceptualization, J.H. and K.P.; methodology, J.H. and K.P.; software, H.K and J.H.; validation, H.K. and J.H.; formal analysis, J.H.; investigation, H.K. and J.H.; resources, N.N., J.H.; data curation, H.K. and N.N.; writing—original draft preparation, H.K.; writing—review and editing, H.K., J.H., and K.P.; visualization, H.K. and J.H.; supervision, K.P.; project administration, K.P.; funding acquisition, K.P. and H.J.
The authors declare no conflict of interest.
Ban, H., Li, K., Wang, K., Jiao, Y., Liang, L., et al. 2024, A hierarchical combination algorithm for real-time cycle slip detection and repair in low satellite elevation and high ionospheric activity conditions, Scientific Reports, 14, 2342. https://doi.org/10.1038/s41598-024-52902-x
Blewitt, G. 1990, An automatic editing algorithm for GPS data, Geophysical Research Letters, 17, 199-202. https://doi.org/10.1029/GL017i003p00199
Chen, Z., Cui, Y., Li, L., Zhang, Q., Lu, Z., et al. 2020, GDP: an open-source GNSS data preprocessing toolkit, GPS Solutions, 24, 87. https://doi.org/10.1007/s10291-020-01003-z
Deo, M. & El-Mowafy, A. 2015, Cycle Slip and Clock Jump Repair with Multi-Frequency Multi-Constellation GNSS data for Precise Point Positioning, IGNSS Symposium 2015, Outrigger Gold Coast, Qld Australia, Jul 14-16 2015, pp.1-15. https://www.researchgate.net/publication/280874052
EarthScope Consortium, 2023, NSF GAGE Facility Citations, Retrieved from https://www.earthscope.org/app/uploads/2024/05/2023_GAGE-publications.pdf
Estey, L. H. & Meertens, C. M. 1999, TEQC: the multi-purpose toolkit for GPS/GLONASS data, GPS Solutions, 3, 42-49. https://doi.org/10.1007/PL00012778
Feng, Y. 2008, GNSS three carrier ambiguity resolution using ionosphere-reduced virtual signals, Journal of Geodesy, 82, 847-862. https://doi.org/10.1007/s00190-008-0209-x
Freymueller, J. T. 2003, IGSMAIL-4318: new version of ClockPrep program, IGS central bureau. https://lists.igs.org/pipermail/igsmail/2003/004314.html
Ha, J., Kim, Y.-G., Rim, H.-J., & Park, K.-D. 2023, Investigation of Precision Orbit Determination Procedure and Models for POD SW Development, 2023 IPNT Conference, Jeju, Korea, Nov 1-3 2023, pp.217-220. https://ipnt.or.kr/2023proc/152
Kawamoto, S., Takamatsu, N., & Abe, S. 2023, RINGO: A RINEX pre-processing software for multi-GNSS data, Earth Planets Space, 75, 54. https://doi.org/10.1186/s40623-023-01811-w
Kim, H.-H., Ha, J., Kim, Y.-G., Rim, H.-J., & Park, K.-D. 2025a, Development of GPS Data Pre-processing Algorithm Using Dual-frequency Observations, JPNT, 14, 157-165. https://doi.org/10.11003/JPNT.2025.14.2.157
Kim, Y.-G., Rim, H.-J., Ha, J., & Park, K.-D. 2023, Comparison of Solar Radiation Pressure Models for Precise Orbit Determination of GPS, 2023 IPNT Conference, Jeju, Korea, Nov 1-3 2023, pp.369-371. https://ipnt.or.kr/2023proc/150
Kim, Y.-G., Rim, H.-J., & Park, K.-D. 2025b, Development of POD and Prediction Software for Ultra-Rapid Orbit Products of GPS Satellite, 2025 IPNT Conference, Jeju, Korea, Nov 4-8 2025, pp.389-392. https://ipnt.or.kr/2025proc/104
Nischan, T. 2016, GFZRNX—RINEX GNSS data conversion and manipulation toolbox (Version 1.05), GFZ Data Services. https://doi.org/10.5880/GFZ.1.1.2016.002
Václavovic, P. & Douša, J. 2016, G-Nut/Anubis: open-source tool for multi-GNSS data monitoring with a multipath detection for new signals, frequencies and constellations, International Association of Geodesy Symposia, 143, 775-782. https://doi.org/10.1007/1345_2015_97
Zhao, Q., Sun, B., Dai, Z., Hu, Z., Shi, C., et al. 2015, Real-time detection and repair of cycle slips in triple-frequency GNSS measurements, GPS Solutions, 19, 381-391. https://doi.org/10.1007/s10291-014-0396-2