Young-Ho Jung1![]() , Taek Geun Lee1
, Taek Geun Lee1![]() , Kwangjae Lim2
, Kwangjae Lim2![]() , Hyoungsoo Lim2
, Hyoungsoo Lim2![]() , Hyung Keun Lee1†
, Hyung Keun Lee1†![]()
1Department of Electronics and Information Engineering, Korea Aerospace University, Gyeonggi-do 10540, Korea
2Terrestrial & Non-Terrestrial Integrated Telecommunications Research Laboratory, Electronics and Telecommunications Research Institute (ETRI), Daejeon 34129, Korea
†Corresponding Author: Hyung Keun Lee, E-mail: hyknlee@kau.ac.kr
Citation: Jung, Y.-H., Lee, T.G., Lim, K., Lim, H., & Lee, H.K., 2024, Design of Multi-Band GPS/KPS RTK Simulator, Journal of Positioning, Navigation, and Timing, 13, 341-353.
Journal of Positioning, Navigation, and Timing (J Position Navig Timing) 2024 September, Volume 13, Issue 3, pages 341-353. https://doi.org/10.11003/JPNT.2024.13.3.341
Received on 12 August 2024, Revised on 20 August 2024, Accepted on 27 August 2024, Published on 15 September 2024.
License: Creative Commons Attribution Non-Commercial License (https://creativecommons.org/licenses/by-nc/4.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
This paper presents the design results of a Multi-band Global Positioning System (GPS)/Korean Positioning System (KPS) Real-Time Kinematics (RTK) precise positioning simulator and evaluate its functionalities. The designed simulator consists of a trajectory generation module, a Radio Frequency (RF) signal generation module, a RF signal reception module, a coarse positioning module, a precise positioning module, and an error statistics reporting module. Simulations in realistic scenarios confirm that the proposed baseband simulator works appropriately. The developed simulator can adjust the type, number, band, and Pseudo Random Noise (PRN) code type of the satellite constellation in various ways, and the practical positioning performance can be tested. It can also reflect the channel influence at the actual RF stage and the influence during the initial synchronization and tracking process. Considering such advantages, the proposed simulator would be useful in future researches and developments related to KPS.
GPS, KPS, QZSS, L6 band, S band, RTK, simulator
각국의 전역/지역 위성항법시스템의 개발 및 개선 현황을 살펴보면 다양한 사용자에 대하여 보다 안정적이고 다양한 서비스를 제공하기 위하여 점진적으로 더 많은 주파수 대역을 활용할 예정이라는 것을 파악할 수 있다. Global Positioning System (GPS) 서비스의 시작 시점부터 활용되어 온 L1과 L2 대역만으로 정확성 이외의 무결성과 가용성을 보장하기 어렵다고 판단하였으므로 근래에 들어 L5 대역을 추가하여 성능을 보완하기 시작하였다. 이후, 새로운 위성항법시스템에 해당되는 Galileo, BeiDou, Quasi-Zenith Satellite System (QZSS), Indian Regional Navigational Satellite System (IRNSS) 등은 사용 포화상태에 도달한 L1, L2, L5 대역의 한계를 고려하여 최근에는 L6 및 S 대역의 활용을 고려하기 시작하고 있다. L6 및 S 대역은 주로 정밀 측위 혹은 긴급구조 서비스에 활용될 예정으로 조사된다 (Chun et al. 2017, Han et al. 2023, Jeon et al. 2024).
우리나라도 2022년부터 Korean Positioning System (KPS)의 개발을 시작함에 따라 신규 주파수 대역의 활용과 관련하여 적절한 항법코드와 변복조 방식 그리고 기존 주파수 대역과의 간섭도를 우선 검토하기 시작하였다 (Shin et al. 2021, Han et al. 2022a, 2022b). 또한, 정밀 측위와 관련해서는 GPS와 KPS를 활용한 cm급 서비스에 대비하기 시작하였다. Real-Time Kinematics (RTK), Network RTK (NRTK), Precise Point Positioning (PPP), PPP-RTK, 그리고 Post-processed kinematics 등 다양한 정밀 측위 방식의 예에서 알 수 있듯이, 향후 KPS가 운용되기 시작하면 공식적인 cm급 서비스뿐 아니라 KPS를 활용하는 다양한 정밀 측위 기술이 다수의 분야에서 파생되리라 예상한다.
가시화되지는 않았지만 향후 예상되는 다양한 정밀 측위 응용 서비스들을 KPS의 발사 및 운용 시점 이전에도 유연하게, 빠르게, 그리고 완성도 높게 대비하기 위해서는 현실 반영도가 높은 시뮬레이터가 필요하리라 판단된다. 이를 위해서 시뮬레이터는 신호 생성 관점에서 대다수의 위성항법 시스템이 항법 메시지에 활용하고 있는 quasi-Keplerian parameter를 입력으로 반영하여 유연하게 위성의 궤도를 생성할 수 있으며, 다양한 시나리오에 근거하여 사용자의 궤적과 위성/사용자 사이의 참거리/거리변화율 정보를 생성할 수 있어야 하며, 다양한 반송파 주파수와 항법코드에 대하여 변조를 수행하고 분석할 수 있어야 하며, 링크 채널에 위상 옵셋과 무선 채널 특성, 그리고 잡음에 의한 영향을 상세히 반영할 수 있어야 한다. 또한, 신호 수신 관점에서는 최소한 항법 코드의 획득과 추적, 반송파의 추적, 동기 획득 및 신호처리, 채널 오차를 반영한 의사거리/위상 측정치의 생성, 실수해 생성, 의사거리/위상 측정치의 다양한 주파수 조합, 미지정수 결정 및 검증 등의 기능을 수행할 수 있어야 하겠다.
이와 같은 필요성에 기반하여 본 논문은 다중 대역 항법신호의 정밀 측위 활용을 위한 위성항법신호 송수신 시뮬레이터 (GNSS Signal Transmission and Reception Simulator; GSTRS)를 설계하고 그 기능을 평가하였다. 본 논문의 구성은 다음과 같다. 먼저 2장에서는 고정밀 측위 시뮬레이터의 구조와 세부 블록 구현에 대해 서술하였고, 3장에서는 각 세부 블록의 기능 검증 결과를 제시하였다. 이어 4장에서는 통합 시뮬레이션 결과를 제시하고, 마지막으로 5장에서 결론을 맺도록 하겠다.
설계된 시뮬레이터는 위성/사용자 참궤적 생성부, 위성항법신호 송수신 시뮬레이터부, 고정밀 측위 시뮬레이터부, 측위 결과 분석부로 구분된다. 시뮬레이터의 전체적인 구성은 Fig. 1과 같다.
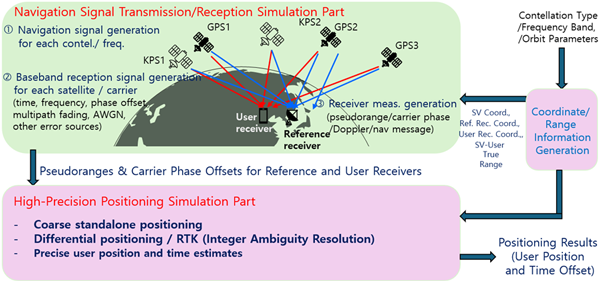
Fig. 1. Overall structure of the multi-band GPS/KPS RTK simulator.
위성과 단말 사이의 참 거리 값을 기반으로 기저대역 시뮬레이션을 수행하기 위해서는 현실적인 위성의 위치와 단말의 위치를 유연하게 생성할 수 있는 기능이 필요하다. 궤도력 데이터에 시점을 지정하여 위성의 위치를 지정하는 기능이 있으면 운동하는 위성의 다양한 위치를 최소한의 파라미터로 계산할 수 있으므로 편리하다. 따라서, 설계된 시뮬레이터는 방송궤도력을 활용하여 현실적인 위성궤도를 생성하고 임의의 위치에 기준국과 사용자 단말의 위치를 지정하여 참 거리값을 생성할 수 있도록 하였다. Fig. 2는 제안된 시뮬레이터가 파라이터를 임의 지정하여 생성한 KPS 위성의 궤도를 예시한 것이며, Fig. 3은 임의의 시점에 서울에 위치하는 사용자로부터 가시위성들까지의 경로 상에 발생하는 전리층 통과 지점(ionosphere pierce point)의 분포를 예시한 것이다. 위성 궤도의 파라미터를 지정하기 위해서는 Receiver Independent Exchange Format (RINEX) 포맷의 방송궤도력 데이터를 입력 파일로 활용할 수 있도록 시뮬레이터를 구현하였다.
위성 궤도의 지정에 덧붙여 사용자 단말기의 위치/궤적를 지정하고 저장하면 위성과 단말기 사이의 참 거리 정보와 상대속도 정보를 생성할 수 있게 된다. 이와 같이 생성된 참 거리 값에 오차 성분을 추가하면 간단한 측정치 영역의 시뮬레이션이 가능하다. 이에 덧붙여 송수신 채널 시뮬레이터부를 추가 활용하면 보다 상세한 Radio Frequency (RF) 신호 영역에서 시뮬레이션이 가능하게 된다. 또한, 위성과 사용자의 참 위치 값 그리고 위성과 사용자 사이의 참 거리 정보와 속도 정보는 시뮬레이션에 필요한 분석과 평가에 유용하게 활용될 수 있다.
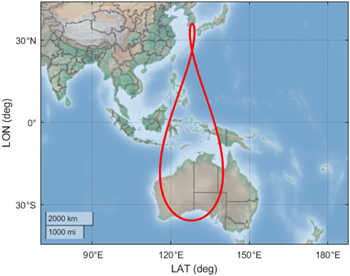
Fig. 2. An illustrative example of the KPS Inclined Geosynchronous Orbit (IGSO) assumed by the simulator.
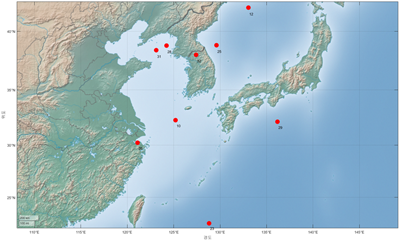
Fig. 3. An illustrative example of the Ionospheric Pierce Points (IPPs) for the receiver located in Seoul to
위성 송신 신호 생성부에서는 GNSS 종류 및 전송 대역, 위성의 pseudo-random noise index (PRNID)에 해당하는 기저대역 또는 중간 대역 신호를 생성하는 블록이다. GPS L1 C/A, GPS L1C, GPS L5, 시뮬레이션을 위하여 가정된 KPS L6 후보신호, 시뮬레이션을 위하여 가정된 KPS S 후보신호의 5가지 옵션에 맞는 송신 신호 생성이 가능하다. GPS 신호들은 규격 (IS-GPS-200N 2022, IS-GPS-705J 2022, IS-GPS-800J 2022)에 따라서 생성하였고, KPS 후보 신호 (Lim 2023, Han & Lim 2023) 들은 시뮬레이션을 위하여 Table 1과 같은 특징과 Figs. 4-5와 같은 생성 과정을 거친다.
위성 신호는 샘플링 된 기저대역 신호로 전송되고 다음의 세부 기능을 포함한다.
Table 1. Characteristics of implemented KPS candidate signals.
| Band | L6 band | S band | ||
|---|---|---|---|---|
| Phase | I | Q | I | Q |
| Data rate | 50 bps | 500 bps | 50 bps | 250 bps |
| FEC | CC R=1/2 | CC R=1/2 | CC R=1/2 | CC R=1/2 |
| Encoded data rate | 100 sps | 1 ksps | 100 sps | 500 sps |
| Chip rate | 2.046 Mcps | 5.115 Mcps | 1.023 Mcps | 2.046 Mcps |
| Spreading code (primary) | 1,023 chip Kasami sequence | 5,115 chip truncated Gold code** | 1,023 chip Kasami sequence | 4,092 chip truncated Gold code |
| Spreading code (secondary) | [0 1 0 0 1 1 1 1 1 0 1 0 0 0 0 1 1 0] | – | [0 1 0 0 1 1 1 1 1 0 1 0] | – |
| Chip modulation | BOCcos(2,2) | BOCcos(5,5) | BOCcos(1,1) | BOC(5,2) |
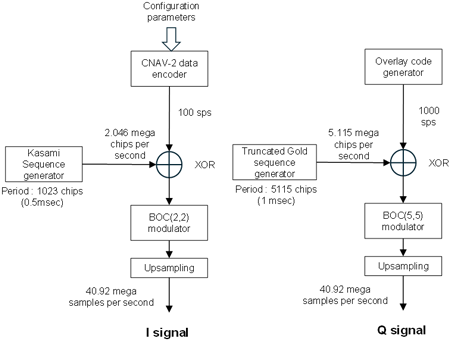
Fig. 4. Baseband signal generation method for KPS L6 band candidate signal.
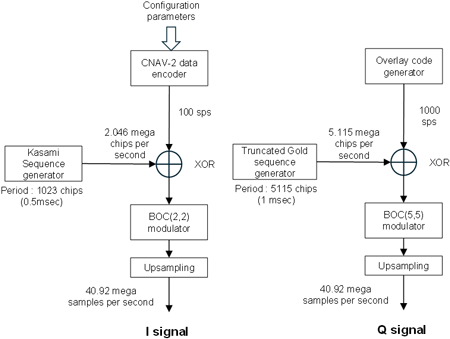
Fig. 5. Baseband signal generation method for KPS S band candidate signal.
위성 수신 신호 생성부는 각 위성과 기준국 및 사용자 사이의 링크를 구성하고 수신기에서의 모든 가시 위성으로부터의 수신 신호를 더한 신호를 모사하여 생성하는 블록으로 다음의 세부 기능을 포함한다.
구체적인 신호 생성 과정은 Fig. 6과 같다. 시뮬레이션 시나리오에 따라 해당 단말기에서 수신 가능한 복수의 위성들의 종류 및 대역, Pseudorandom Noise (PRN) 번호, 위성-단말간 거리, 속력 정보를 바탕으로 기저대역 유효 신호를 생성하는데, 먼저 앞에서 설명한 위성 송신신호 생성부를 활용하여 각 위성의 송신신호를 생성한다. 이후 각 위성과 단말사이의 도플러 주파수를 계산하여 주파수 옵셋 형태로 신호를 변형하고, 거리 참 값을 활용하여 각 위성 신호의 지연된 신호를 생성한다. 이때 기저대역 또는 중간대역 샘플링 시간보다 작은 값을 갖는 소수 배 지연에 대해서도 신호의 위상 옵셋으로 반영하는 방법으로 적절하게 구현하였다. 이후 각 위성과 단말 사이의 거리에 대응되는 신호 감쇠를 적용한 후 각 위성 수신 신호와 AWGN을 더하여 수신신호를 생성한다.
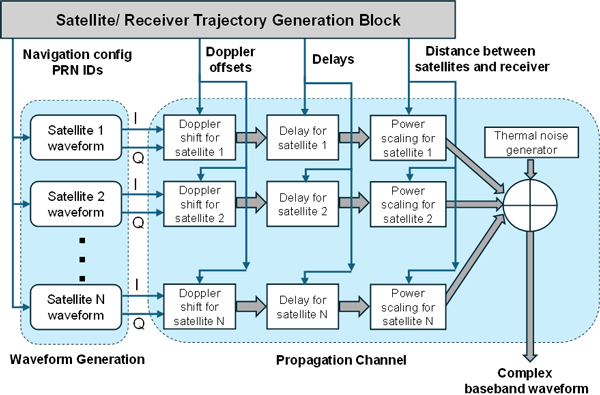
Fig. 6. Structure of received satellite signal generation block.
위성 신호 수신부는 수신 신호로부터 가시 위성들에 대한 탐색과 초기 동기를 획득하고, 고정밀 측위를 위해 필요한 의사거리/위상 측정치를 계산하는 블럭이다. 이를 이용하여 각 위성/캐리어에 대한 수신 기능을 수행하며, 다음과 같은 세부 기능을 포함한다.
Fig. 7은 위성 신호 수신 부 구조를 나타낸 그림이고, 앞에서 서술한 세부 기능은 중간대역 신호나 기저대역 신호를 직접 활용하여 계산하는 고속 모듈(fast module)과 bit 단위에서 수행되는 저속 모듈(slow module)로 구분할 수 있는데, 이 중 고속 모듈 에 해당하는 기능을 구현하였다. 초기동기 과정은 수신 신호로부터 전체 위성 PRNID에 대해서 해당 시점에서의 가시 위성들을 식별하고, 주파수 옵셋과 시간 옵셋의 초기 추정치를 도출하는 것으로 GNSS 수신기에서 널리 사용되는 주파수 영역에서의 상관을 활용하는 Fig. 8의 병렬 코드-위상 검색 알고리즘(parallel code-phase search algorithm)을 구현하였다 (Borre et al. 2007). MATLAB에 GPS L1 C/A 코드에 대해 구현되어 있는 “gnssSignalAcquirer” (Mathworks, gnssSignalAcquirer 2024)를 변형하여 다양한 코드 옵션에 대해 적용 가능하도록 구현하였다. 주파수 옵셋 추정 값은 정해진 범위에서 일정 간격으로 (예를 들어 10 kHz 범위에서 500 Hz 간격) 주파수 옵셋 후보 값들을 정하고, 해당 값으로 주파수 옵셋을 보상한 신호에 Fast Fourier Transform를 적용하여 주파수 영역 신호를 만들고, 각 PRNID별로 사전 계산되어 있는 주파수 영역 코드와 곱한 후에 Inverse Fast Fourier Transform을 적용하면 각 위상 옵셋 값에 해당하는 상관 값을 얻을 수 있다. 주파수 옵셋 후보 값들을 변경하여 전체 계산한 결과는 Fig. 9와 같은 형태를 갖는다. 해당 PRNID에 해당하는 신호가 수신 신호에 포함되어 있는 경우 그림과 같이 일정 문턱치 값을 넘는 피크 값이 존재하게 된다. 이 피크 값에 해당하는 주파수 옵셋 값과 위상 옵셋 값을 초기 주파수 옵셋과 코드 위상 옵셋 값으로 추정하게 된다. Fig. 9에서는 실제 지연 값인 700.34 chip (1.023 Mcps), 주파수 옵셋 3689 Hz 인 샘플링 속도 20.46 Msps인 GPS L5 수신 신호에 대한 초기 동기 검색 결과 예시이다. 수신신호의 실제 지연과 주파수 옵셋과 유사한 값인 14007 샘플 (700.35 chip에 해당)과 주파수 옵셋 3750Hz의 조합에서 피크 값을 갖는 것을 볼 수 있어 성공적으로 초기 동기가 획득된 것을 알 수 있다.
초기 동기 획득 이후에는 가시 위성으로 식별된 PRNID에 해당하는 위성에 대해 동기 추적(tracking) 과정을 수행하여 잔여 주파수 옵셋, 시간 옵셋, 위상 옵셋 값을 계산하고, Fig. 7에서와 같이 이 결과를 고정밀 측위 블럭으로 전달하게 된다. 동기 추적 과정은 Fig. 10과 같이 기준 값(prompt), 1/2 chip 앞선 값(early), 1/2 chip 늦은 값(late)에 따라 생성된 코드와의 3개 상관 값을 활용하여 Frequency Locked Loop (FLL), Phase Locked Loop (PLL), Delay Locked Loop (DLL)을 작동하는 방법 (Kaplan & Hegarty 2017 )에 따라 구현하였다. MATLAB에 GPS L1 C/A 코드에 대해 구현되어 있는 “gnssSignalTracker” (Mathworks, gnssSignalTracker 2024)를 변형하여 다양한 코드 옵션에 대해 적용 가능하도록 구현하였다. 초기 동기 블록에서 추정한 지연 값과 동기 추적 블록에서 추정한 지연과 위상 누적값을 고정밀 측위 시뮬레이터부로 전달하여 의사거리를 계산할 수 있다.
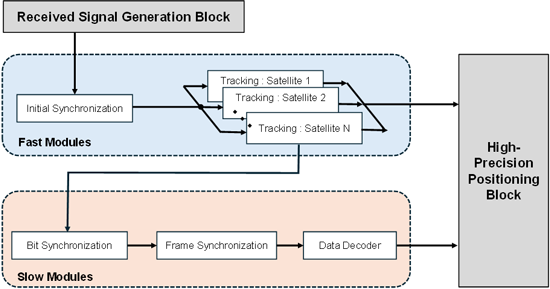
Fig. 7. Structure of satellite signal receiver block.
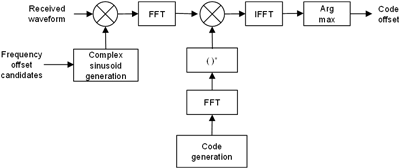
Fig. 8. Structure of initial synchronization block.
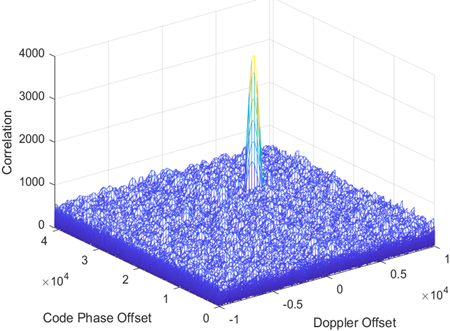
Fig. 9. An example of calculated correlation values for initial frequency and code phase offset estimation.
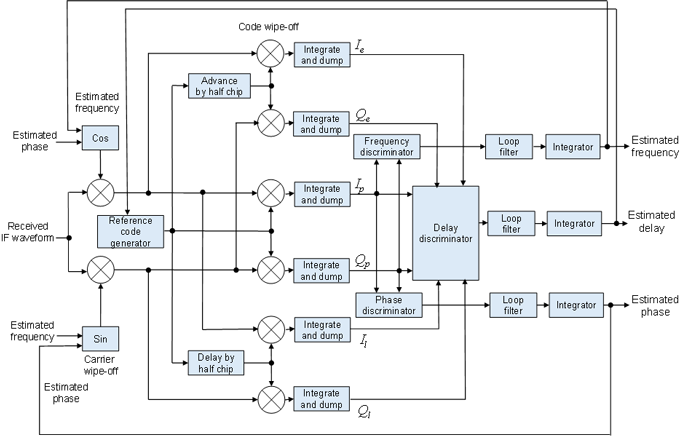
Fig. 10. The structure of frequency, delay, and phase tracking block.
기준국 및 사용자에서 위성 신호 수신 블록에서 생성된 의사거리/위상 측정치를 전달받는다. 기준국은 자신의 측정치와 고정밀 측위를 위한 보정 및 기준 정보를 제공한다. 사용자는 자신이 측정한 오프셋 값과 기준국으로부터 제공된 정보를 바탕으로 RTK 방식으로 고정밀 측위를 수행한다.
설계된 시뮬레이터의 측위 과정은 Fig. 11과 같이 개략 측위, 실수해 생성, 그리고 정수해 생성 등 크게 세 단계로 분류되어 진행된다. 먼저 개략 측위 과정에서는 링크/채널 시뮬레이터 부로부터 의사거리와 위상 측정치를 전달받아서 기준국과 사용자 수신기의 개략 단독 위치를 결정하고 시선각(line of sight) 정보를 생성한다. 이후에는 두 수신기에서 취득된 의사거리와 위상 측정치에 대하여 수신기간 단일차분(single difference)과 기준위성에 대한 이중 차분(double difference)를 적용하여 기준국 수신기로부터 사용자 수신기로의 기저벡터(baseline vector) 개략 위치해를 생성한다.
이중 차분 측정치의 시간영역 순열을 입력으로 실수해(float solution)을 산출하기 위해서는 위치영역 추정기가 필요하며 이는 크게 시간 전달 과정과 측정치 갱신 과정으로 구분된다. 시간 전달 과정에서는 차분 위상 측정치와 궤도력 정보를 조합하여 단말기 위치의 정밀한 시간 증분을 추정하고, 추정기 측정 갱신 과정에서는 단말기 위치 추정치와 차분 의사거리를 결합하여 실수해와 오차공분산 행렬을 산출한다.
고정밀 측위부의 마지막 과정은 실수해와 오차공분산 행렬을 활용하여 각 가시 위성에 대한 미지정수 후보들을 산출하고 검증하여 정수해를 산출하는 과정이다. 각 미지정수 후보에 대해서 미리 지정된 가격함수를 활용하여 지표값을 산출하고, 최소 가격함수 대비 차순위 가격함수의 ratio가 설정된 임계값을 초과하는 경우에 최소 가격함수를 산출하는 미지정수 후보를 미지정수로 확정하게 된다. 확정된 미지정수를 이중차분 위상 측정치에 보상하면 cm급 정확도의 정수해가 최종적으로 산출되게 된다.
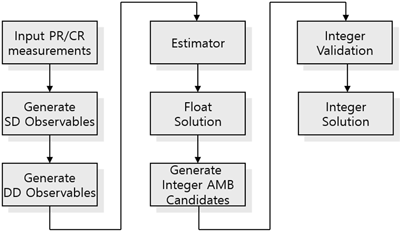
Fig. 11. Flow chart of the real-time kinematic positioning part.
설계된 시뮬레이터의 기능 적정성을 평가하기 위하여 각 세부 블록별로 독립된 모의실험을 통하여 정상 동작을 확인하였다. 위성/사용자 참 궤적 생성부와 고정밀 측위부를 결합하여 두 블록의 동작을 확인하였고, 위성항법신호 송수신 시뮬레이터부는 가상의 도플러 주파수와 지연을 갖는 임의의 위성군을 가정하고, 각 후보 코드별로 정상 동작을 확인하였다.
설계된 시나리오 생성 시뮬레이터의 기능을 검증하기 위하여 측정치 영역 시뮬레이션을 수행하여 위성 궤도 생성 기능과 정밀 측위 기능의 적정성을 평가하였다. 시뮬레이션에 필요한 위성 궤도의 생성을 위해서는 2023년 5월 22일의 GPS와 QZSS의 RINEX 포맷 방송궤도력 파일과 관측 파일을 수집하여 활용하였다.Fig. 12는 임의 지정된 사용자 위치와 RINEX 포맷 방송궤도력 파일, 그리고 RINEX 포맷 관측 파일을 해독하여 얻은 각 위성에 대한 의사거리 측정치, 시뮬레이션 기간 동안의 가시 위성의 PRN 번호, 앙각, 그리고 방위각을 저장하여 도시한 것이며, Fig. 13은 임의 지정된 사용자 위치와 RINEX 포맷 방송궤도력 파일을 활용하여 시뮬레이터가 생성한 가시위성들에 대한 의사거리, 위성번호, 앙각, 그리고 방위각을 도시한 것이다. 두 그림의 비교에 의하면 설계된 시뮬레이터가 위성의 위치를 적절하게 생성하는 것을 확인할 수 있다.이를 기반으로 23시 40분 부터 500초간의 기간에 실측 데이터를 활용한 측위 결과와 시뮬레이터로 생성된 참 거리값을 활용한 측위 결과를 비교하였다. Fig. 14는 실측 데이터에 의한 측위 결과를 나타내며 Fig. 15는 시뮬레이터로 생성된 참 거리값에 측정오차를 추가하지 않고 구동한 측위 결과를 각각 나타낸다. 두 그림의 비교에 의하여 전반적인 결과의 경향은 비슷하나 시뮬레이터로 생성된 참 거리값을 활용한 측위 오차는 영값을 나타내어, 위성궤도를 생성하고 임의의 사용자 위치를 설정하여 시뮬레이터가 만들어낸 거리값은 적절하며 오차 통계에도 유용하게 활용될 수 있음을 확인할 수 있었다.
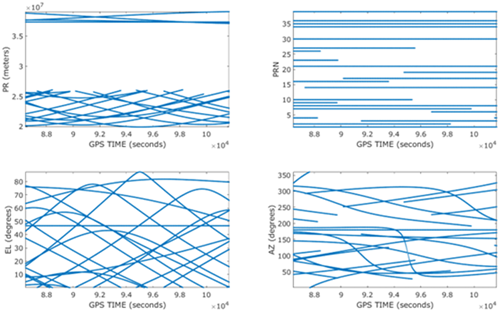
Fig. 12. pseudoranges (left top), satellite index numbers (right top), elevation angles (left bottom), and azimuth angles (right bottom) used by an online receiver.
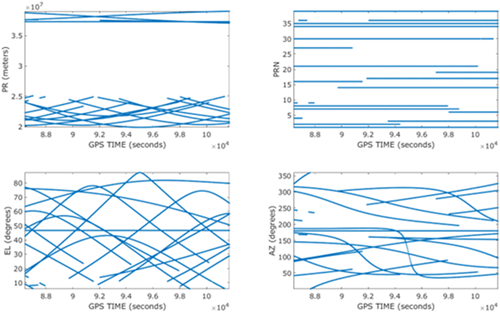
Fig. 13. pseudoranges (left top), satellite index numbers (right top), elevation angles (left bottom), and azimuth angles (right bottom) used by the developed simulator.
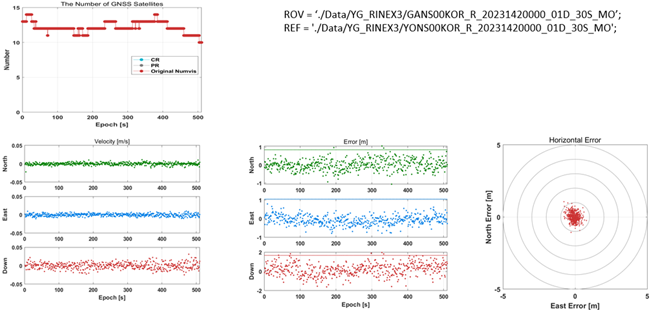
Fig. 14. Number of satellites (left top), NED velocity errors (left bottom), NED baseline errors (middle bottom), and horizontal baseline error scatter plot (right bottom) generated by processing logged real measurements.
정밀 측위 기능의 검증을 위해서 크게 두 단계로 나누어 첫 번째로 실수해에 대한 검증을 수행하였으며 두 번째로 정수해에 대한 기능 검증을 수행하였다. 참 거리값에 측정오차를 추가하지 않은 결과에 해당하는 Fig. 15에 대비하여 Fig. 16은 오차를 주입한 경우의 실수해를 나타낸 것이다.
그림에 의하면 시뮬레이터에 의하여 생성된 거리값들은 적정하며, 설계된 추정기에 의하여 생성되는 실수해도 적정한 수준임을 확인할 수 있다. Fig. 17은 오차를 주입한 경우의 정수해를 나타낸 것이다. 두 그림을 비교해 보면 시뮬레이터에 의하여 생성된 참 거리값들은 적정하며, 미지정수 결정 기능에 의하여 생성된 정수해는 North East Down (NED) 방향으로 오차를 분해했을 때 표준편차가 각각 3.6 cm, 2.1 cm, 그리고 4.8 cm로서 적정한 수준의 정확도를 보임을 확인할 수 있다.
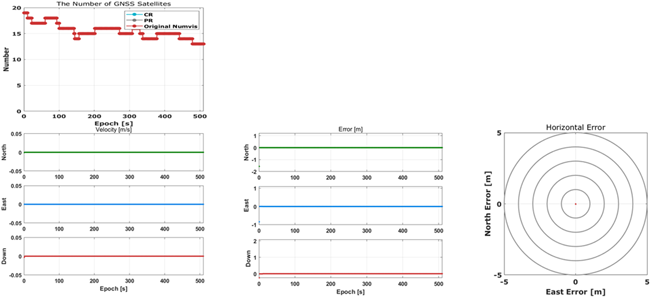
Fig. 15. Number of satellites (left top), NED velocity errors (left bottom), NED baseline errors (middle bottom), and horizontal baseline error scatter plot (right bottom) generated by processing the simulated ideal measurements.
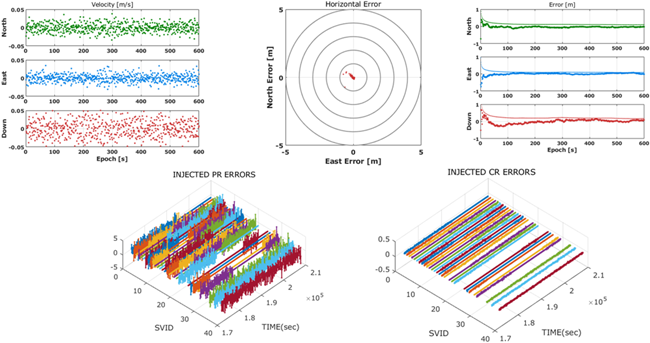
Fig. 16. NED velocity errors (left top), baseline error scatter plot (right top), NED baseline errors (right top), injected pseudorange errors (left bottom), and injected carrier phase errors (right bottom) used in generating the float solution of the simulator with measurement errors.
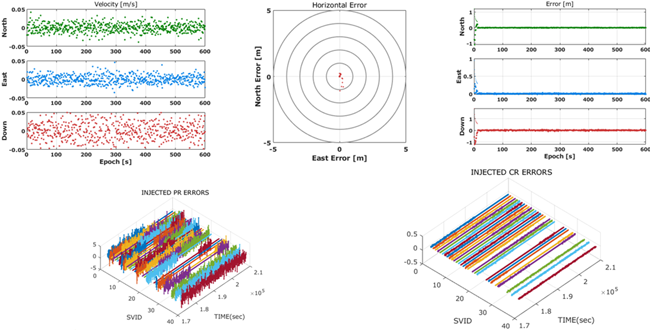
Fig. 17. NED velocity errors (left top), baseline error scatter plot (right top), NED baseline errors (right top), injected pseudorange errors (left bottom), and injected carrier phase errors (right bottom) used in generating the integer solution of the simulator with measurement errors.
위성 송신신호 생성부에서는 GPS L1 C/A, GPS L1C, GPS L5, KPS L6 후보신호, KPS S 후보신호의 생성이 가능하다. 생성 신호의 I/Q 시간영역 특성과 Fig. 18과 같은 주파수 영역 스펙트럼을 관찰하였고, 정상적으로 생성됨을 확인하였다.
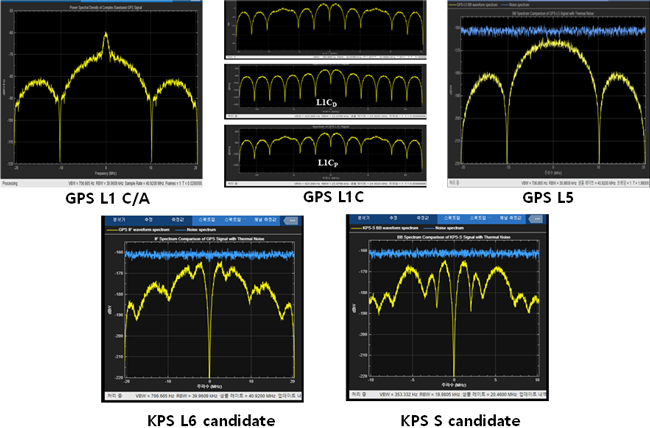
Fig. 18. Spectrum of baseband signal according to code options.
위성 수신 신호 생성부와 위성 신호 수신부는 Table 2와 같이 4개의 가시 위성이 있는 시나리오에 맞춰서 정상 동작을 검증하였다. 모든 위성은 동일한 종류의 코드를 갖는 것을 가정하였고, 코드 종류는 GPS L1 C/A, GPS L1C, GPS L5, 추측된 KPS L6 후보신호, KPS S 후보신호 중 선택이 가능하다.
Table 2. Scenario for satellite navigation signal transmission/reception simulator verification.
| Variables | Assigned values |
|---|---|
| PRNID | 7, 11, 20, 28 |
| Frequency offset (Hz) | 3689, 4300, 8596, 9568 |
| Delay (chip) | 700.34, 987.21, 625.89, 712.88 |
| SNR (dB) | -17.5, -18.5, -17, -18 |
Table 3은 초기 동기 획득부의 정상 동작 확인 결과이다. 주파수 옵셋 값은 ± 10 kHz 범위에서 250 Hz 간격으로 검색하였고, 다양한 코드 옵션에서 모두 실제 주파수 옵셋 값과 지연 값에 근접하는 초기 추정치를 성공적으로 추정하는 것을 확인할 수 있다.초기 동기 획득 이후에는 잔여 주파수 옵셋과 지연 값이 있고, Fig. 10의 주파수, 지연, 위상 tracking 과정을 통해 FLL, DLL, PLL이 적절한 값으로 잘 수렴하는지 여부를 확인하였다. 전체 코드 옵션에 대해 모든 PRNID에서 문제없이 FLL, DLL, PLL이 수렴함을 확인하였다. Fig. 19는 시뮬레이션을 위하여 가 선정된 KPS L6 후보신호와 KPS S 후보 신호에 대한 DLL, FLL, PLL 에러 값과, 잔여 지연, 잔여 주파수 옵셋, 위상 추정치에 대한 추적 결과를 그린 그림의 예이다. 그림에서 볼 수 있듯이 에러 값은 0으로 수렴하고, 지연, 주파수, 위상 값이 잘 수렴하는 것을 통해 동기 추적 블록이 정상적으로 잘 구현된 것을 확인할 수 있다.
Table 3. Verification results for initial synchronization.
| PRNID | Frequency offset estimation | Delay estimation | ||||||
|---|---|---|---|---|---|---|---|---|
| Actual frequency offset | GPS L5 | KPS L6 | KPS S | Actual delay | GPS L5 | KPS L6 | KPS S | |
| 7 | 3689 | 3750 | 3750 | 3750 | 700.34 | 700.35 | 700.35 | 700.35 |
| 11 | 4300 | 4250 | 4500 | 4250 | 987.21 | 987.20 | 987.20 | 987.20 |
| 20 | 8596 | 8500 | 8500 | 8500 | 625.89 | 625.90 | 625.90 | 625.90 |
| 28 | 9568 | 9500 | 9500 | 9500 | 712.88 | 712.87 | 712.90 | 712.90 |
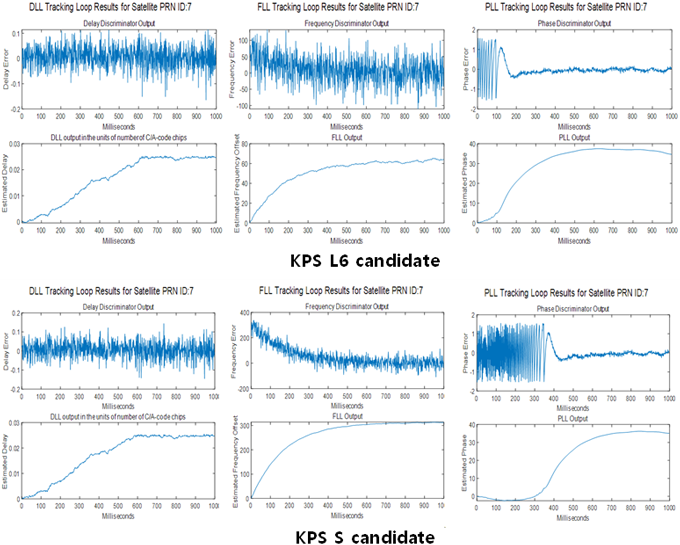
Fig. 19. Convergence examples of DLL, FLL and PLL.
설계된 시뮬레이터의 기능 적정성을 평가하기 위하여 앞에서 설명한 RF 송수신 시뮬레이션을 포함한 전체 시뮬레이터를 결합하여 다중대역 정밀 측위 기능을 평가하였다. 앞에서 설명한 위성/사용자 참 궤적 생성부에서는 실제 위성의 궤적과 원하는 수신기 위치에 따른 실제 시나리오에 가까운 시간 변화에 따른 궤적 생성이 가능하고, 위성신호 송수신 신호 생성부에서는 다양한 대역과 항법 코드 옵션을 자유롭게 선택하여 수신 신호에 대한 모사가 가능하다. 임의의 확률 모형에 따른 오차가 아닌 이러한 수신 신호를 이용하여 초기 동기 획득 및 추적 과정을 거친 결과를 활용하여 의사거리와 반송파 측정 값을 계산하고, 이를 활용하여 최종 위치 추적치를 계산하는 일련의 과정을 통합 시뮬레이션을 통해 구현하였다.
Fig. 20은 통합 시뮬레이션을 위한 각 시뮬레이션 블록 별 연계 방법을 정리한 그림이다. Fig. 13의 시나리오에 따라 10초 기간 동안의 가시위성과 단말 사이의 거리, 수직방향 속도 변화를 10 msec 단위로 생성하였고, 위성항법신호 송수신 시뮬레이터에서는 이 값을 PRN 코드 주기에 해당하는 1 msec 단위로 보간하여 실시간으로 변화하는 거리와 도플러 주파수에 따른 수신신호를 생성한 후, 초기 동기 및 추적 과정을 거쳐, 고정밀 측위 시뮬레이터에서 필요한 의사거리와 반송파 위상옵셋 누적치를 각 대역별로 생성하였다. 고정밀 측위 시뮬레이터는 위성항법신호 송수신 시뮬레이터가 다수 위성에 대하여 생성된 의사거리와 누적 반송파 측정값을 활용하여 최종 위치 추정치를 생성하였다.
Fig. 21은 위성항법신호 송수신 시뮬레이터부 내부에서 생성된 신호를 활용하여 초기 신호획득(signal acquisition) 및 추적 과정에서 추정된 주파수의 추정오차를 나타낸다. 1000 msec까지의 과도응답 구간을 제외하면 전반적으로 주파수 추정 오차는 바이어스 성분을 배제하고 적절하게 추정되고 있음을 확인할 수 있다.
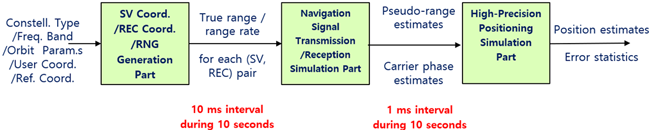
Fig. 20. Interworking between sub-blocks for integrated simulation.
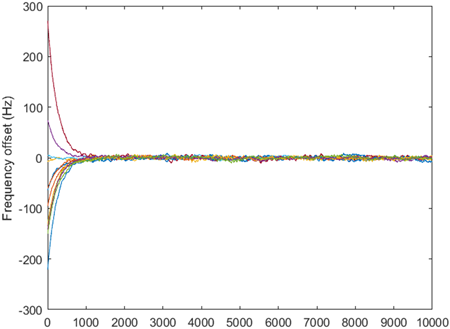
Fig. 21. Initial acquisition and tracking result according to the integrated simulation.
Fig. 22는 위성항법 RF 신호 송수신 시뮬레이터부의 신호 추적(signal tracking) 과정에서 생성되는 의사거리와 누적위상 측정치의 거리 오차를 도시한 것이다. 1000 msec까지의 과도응답 구간을 지나서 시뮬레이터가 정상상태에 돌입하면 측정치 거리 오차 값이 적절하게 유지되고 있음을 확인할 수 있다.
Fig. 23은 위성항법 RF 신호 송수신 시뮬레이터부의 신호 추적 과정에서 생성되는 의사거리와 누적위상 측정치의 거리 증분 오차를 계산하여 도시한 것이다. 정상상태에서 거리 증분 오차에는 시계오차의 증분과 측정잡음의 증분만이 잔류하게 된다. 따라서 의사거리와 누적위상 측정치의 거리 증분 오차는 동일한 시계오차 증분 값을 중심으로 서로 다른 측정잡음의 크기에 의하여 분포하고 있음을 확인할 수 있다.
Fig. 24는 위성항법 RF 신호 송수신 시뮬레이터가 생성한 의사거리와 측정치를 활용하여 수신기의 위치해를 구한 결과를 나타낸 것이다. 수신기 위치해의 오차 분포에 의하면 적절한 오차 수준의 위치해가 생성된 것을 확인할 수 있다.
본 시뮬레이션에 의하여 개발된 시뮬레이터는 RF 신호의 생성, 수신, 신호획득, 신호추적, 단독 위치해 생성, 차분 위치해 생성, 그리고 차분 실수해의 전체 과정을 적절하게 연계하여 수행하는 것을 확인할 수 있다.
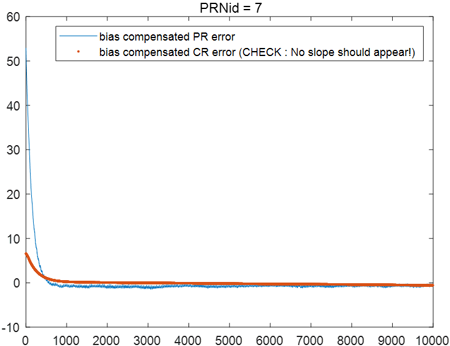
Fig. 22. Bias compensated PR and CR error according to the integrated simulation.
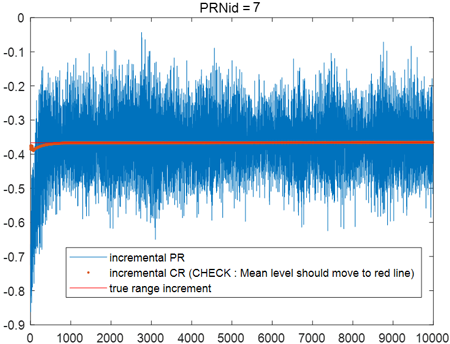
Fig. 23. Comparison between true range increment and incremental PR and CR.
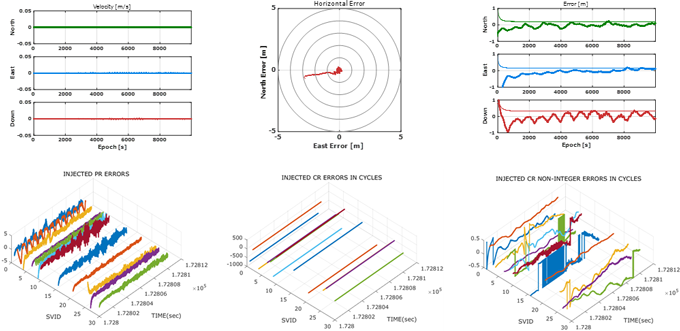
Fig. 24. NED velocity errors (left top), baseline error scatter plot (right top), NED baseline errors (right top), injected pseudorange errors (left bottom), and injected carrier phase errors (right bottom) used in generating the float solution of the integrated simulation.
본 논문에서는 다중 대역 항법신호의 정밀 측위 활용을 위한 위성항법신호 송수신 시뮬레이터 개발하고 기능을 시험한 결과를 제시하였다. 본 시뮬레이터는 모의실험을 위한 다양한 위성군의 종류, 개수, 대역, PRN 코드 종류를 다양하게 설정할 수 있고, 실제 RF단에서의 채널 영향, 초기 동기 및 추적과정에서의 영향을 반영한 실질 적인 사용자 측위 성능 시험이 가능하다. 또한, 사용자 측위 관점에서도 개략 단독 측위 및 차분 측위, 그리고 정밀 측위 등 다양한 사양을 선택할 수 있다. 따라서, 향후 KPS와 관련된 다양한 개발, 평가, 그리고 응용 연구에 유용하게 활용 가능할 것으로 기대된다.
This work was supported by Electronics and Telecommunications Research Institute (ETRI) (23ZH1100, Study on 3D communication technology for hyper-connectivity).
Conceptualization, K. Lim and H. Lim; methodology, Y. H. Jung, K. Lim, H. Lim, and H. K. Lee; software, Y. H. Jung, T. G. Lee, and H. K. Lee; validation, K. Lim and H. Lim; formal analysis, Y. H. Jung, T. G. Lee, and H. K. Lee; writing—original draft preparation, Y. H. Jung and H. K. Lee; administration, Y. H. Jung; writing—review and editing, K. Lim and H. Lim.
The authors declare no conflict of interest.
Borre, K., Akos, D. M., Bertelsen, N., Rinder, P., & Jensen, S. H. 2007, A Software-Defined GPS and Galileo Receiver: A Single-Frequency Approach, Applied and Numerical Harmonic Analysis (Boston, Mass: Birkhäuser).
Chun, S. B., Heo, M. B., Im, S. H., Lim, D. W., & Joo, J.-M. 2017, A development of fundamental technology for the low-noise/high-sensitive Korean Satellite Navigation System, The Korea Aerospace Research Institute Report TRKO201700004160. https://scienceon.kisti.re.kr/commons/util/originalView.do?cn=TRKO201700004160&dbt=TRKO&rn=
Han, K., Bang, E., Lim, H., Lee, S., & Park, S. 2023, Status of Navigation Satellite System Services and Signals, Electronics and Telecommunications Trends, 38, 12-25. https://doi.org/10.22648/ETRI.2023.J.380206
Han, K., Lee, S., Lee, K., & Won, J.-H. 2022a, Performance Analysis for Secured Service Signals of RNSS Systems, Journal of Positioning, Navigation, and Timing, 11, 341-349. https://doi.org/10.11003/JPNT.2022.11.4.341
Han, K., Lee, S., & Won, J.-H. 2022b, A Study on the Waveform Design for KPS Signals in L6 and S Bands, IPNT Conference, Gangneung, Korea, Nov 2-4, 2022, pp.19-22. https://ipnt.or.kr/2022proc/65
Han, K. & Lim, H. 2023, Signal acquisition method and apparatus of GNSS receiver, KR20100034627A, Korean Intellectual Property Office
IS-GPS-200N, NAVSTAR GPS Space Segment/Navigation User Segment Interfaces, Aug. 2022
IS-GPS-705J, NAVSTAR GPS Space Segment/ User Segment L5 Interfaces, Aug. 2022
IS-GPS-800J, NAVSTAR GPS Space Segment/ User Segment L1C Interfaces, Aug. 2022
Jeon, J. H., Lee, J., Kang, J., Kim, S., & Joo, J.-M. 2024, Survey of Signal Design for Global Navigation Satellite Systems, Journal of Positioning, Navigation, and Timing, 13, 1-13. https://doi.org/10.11003/JPNT.2024.13.1.1
Kaplan, E. D. & Hegarty, C. J. 2017, Understanding GPS/GNSS: Principles and Applications, Third edition, GNSS Technology and Applications Series (London: Artech House).
Lim, H. 2023, Design of Chip Rate and Bi-Phase Pulses for Four Navigation Satellite Signals in L6 Band, IPNT Conference, Jeju, Korea, Nov 1-3, 2023, pp.327-329. https://ipnt.or.kr/2023proc/39
Mathworks, gnssSignalAcquirer [Internet], cited 2024 Aug 1, available from: https://kr.mathworks.com/help/satcom/ref/gnsssignalacquirer-system-object.html
Mathworks, gnssSignalTracker [Internet], cited 2024 Aug 1, available from: https://kr.mathworks.com/help/satcom/ref/gnsssignaltracker-system-object.html
Shin, J., Joo, J., Lim, D. W., & Ahn, J. M. 2021, Constant Envelope Multiplexing via Constellation Tailoring Scheme for Flexible Power Allocation of GNSS Signals, Journal of Positioning, Navigation, and Timing, 10, 335-340. https://doi.org/10.11003/JPNT.2021.10.4.335